 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTailored Uncertainty Estimation for Deep Learning Systems
Apr 29, 2022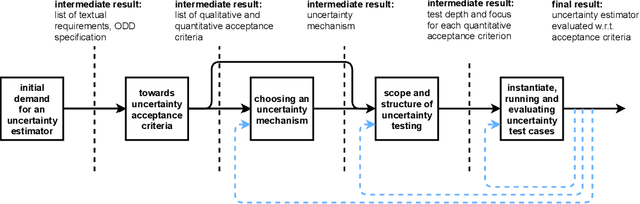
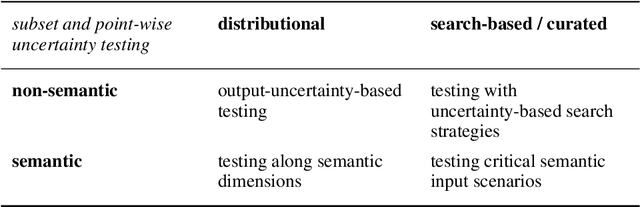
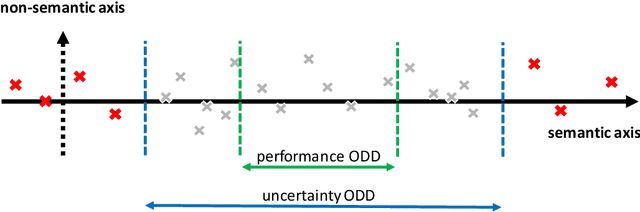
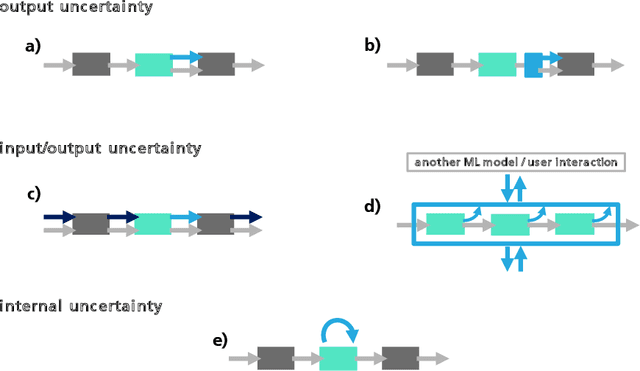
Uncertainty estimation bears the potential to make deep learning (DL) systems more reliable. Standard techniques for uncertainty estimation, however, come along with specific combinations of strengths and weaknesses, e.g., with respect to estimation quality, generalization abilities and computational complexity. To actually harness the potential of uncertainty quantification, estimators are required whose properties closely match the requirements of a given use case. In this work, we propose a framework that, firstly, structures and shapes these requirements, secondly, guides the selection of a suitable uncertainty estimation method and, thirdly, provides strategies to validate this choice and to uncover structural weaknesses. By contributing tailored uncertainty estimation in this sense, our framework helps to foster trustworthy DL systems. Moreover, it anticipates prospective machine learning regulations that require, e.g., in the EU, evidences for the technical appropriateness of machine learning systems. Our framework provides such evidences for system components modeling uncertainty.
Validation of Simulation-Based Testing: Bypassing Domain Shift with Label-to-Image Synthesis
Jun 10, 2021
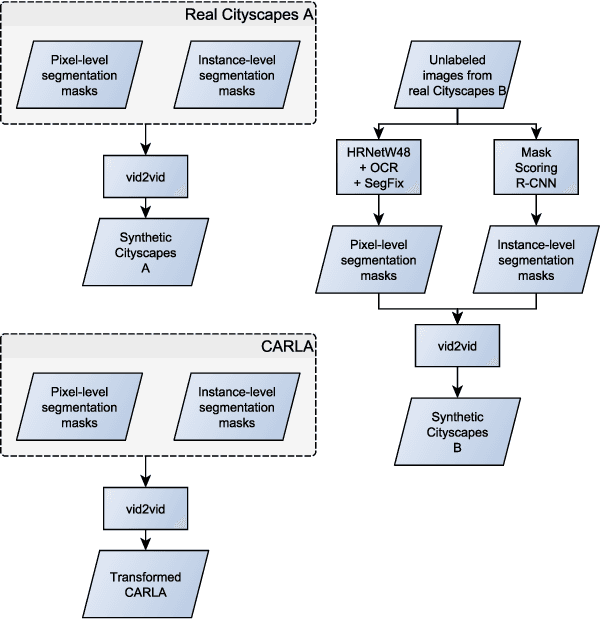


Many machine learning applications can benefit from simulated data for systematic validation - in particular if real-life data is difficult to obtain or annotate. However, since simulations are prone to domain shift w.r.t. real-life data, it is crucial to verify the transferability of the obtained results. We propose a novel framework consisting of a generative label-to-image synthesis model together with different transferability measures to inspect to what extent we can transfer testing results of semantic segmentation models from synthetic data to equivalent real-life data. With slight modifications, our approach is extendable to, e.g., general multi-class classification tasks. Grounded on the transferability analysis, our approach additionally allows for extensive testing by incorporating controlled simulations. We validate our approach empirically on a semantic segmentation task on driving scenes. Transferability is tested using correlation analysis of IoU and a learned discriminator. Although the latter can distinguish between real-life and synthetic tests, in the former we observe surprisingly strong correlations of 0.7 for both cars and pedestrians.
Inspect, Understand, Overcome: A Survey of Practical Methods for AI Safety
Apr 29, 2021The use of deep neural networks (DNNs) in safety-critical applications like mobile health and autonomous driving is challenging due to numerous model-inherent shortcomings. These shortcomings are diverse and range from a lack of generalization over insufficient interpretability to problems with malicious inputs. Cyber-physical systems employing DNNs are therefore likely to suffer from safety concerns. In recent years, a zoo of state-of-the-art techniques aiming to address these safety concerns has emerged. This work provides a structured and broad overview of them. We first identify categories of insufficiencies to then describe research activities aiming at their detection, quantification, or mitigation. Our paper addresses both machine learning experts and safety engineers: The former ones might profit from the broad range of machine learning topics covered and discussions on limitations of recent methods. The latter ones might gain insights into the specifics of modern ML methods. We moreover hope that our contribution fuels discussions on desiderata for ML systems and strategies on how to propel existing approaches accordingly.
Plants Don't Walk on the Street: Common-Sense Reasoning for Reliable Semantic Segmentation
Apr 19, 2021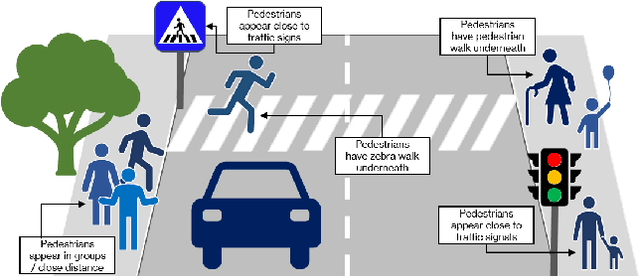

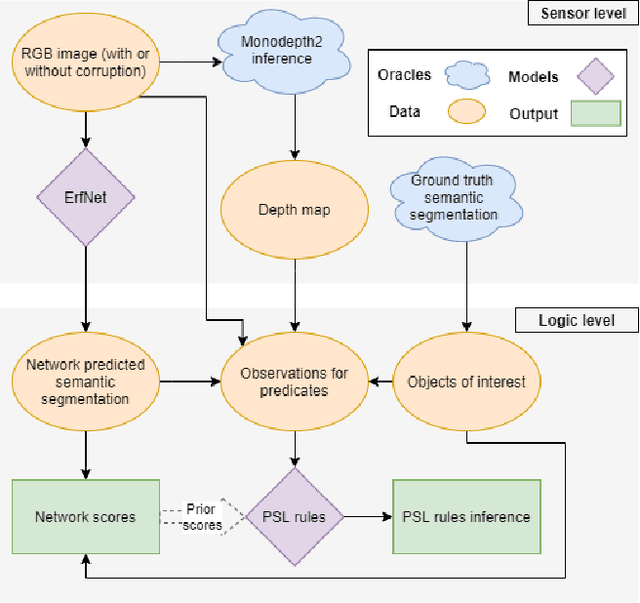

Data-driven sensor interpretation in autonomous driving can lead to highly implausible predictions as can most of the time be verified with common-sense knowledge. However, learning common knowledge only from data is hard and approaches for knowledge integration are an active research area. We propose to use a partly human-designed, partly learned set of rules to describe relations between objects of a traffic scene on a high level of abstraction. In doing so, we improve and robustify existing deep neural networks consuming low-level sensor information. We present an initial study adapting the well-established Probabilistic Soft Logic (PSL) framework to validate and improve on the problem of semantic segmentation. We describe in detail how we integrate common knowledge into the segmentation pipeline using PSL and verify our approach in a set of experiments demonstrating the increase in robustness against several severe image distortions applied to the A2D2 autonomous driving data set.
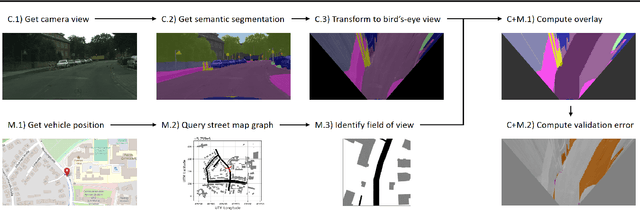
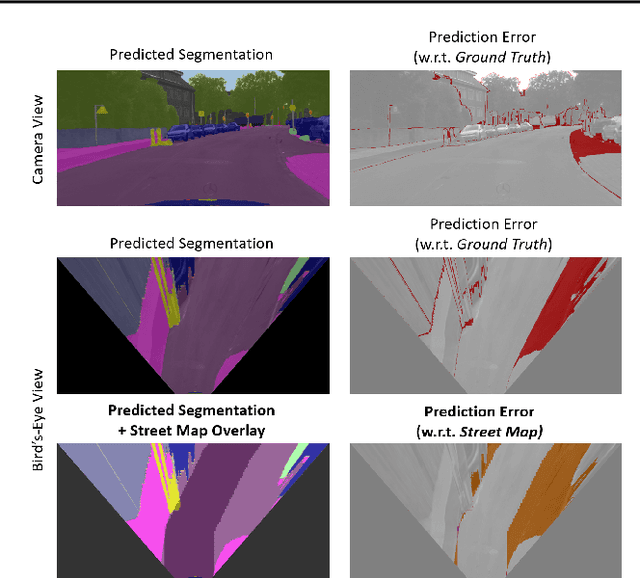
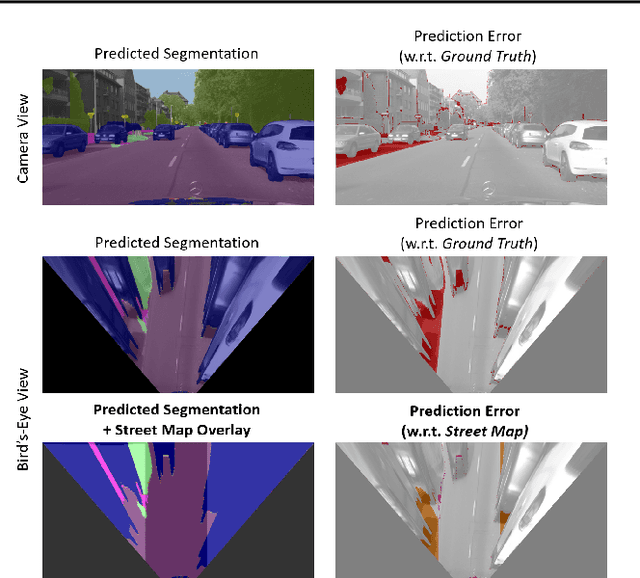
Street-Map Based Validation of Semantic Segmentation in Autonomous Driving
Apr 15, 2021
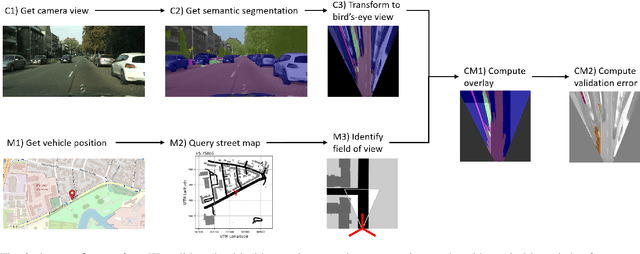
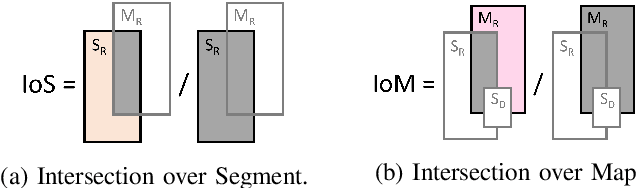
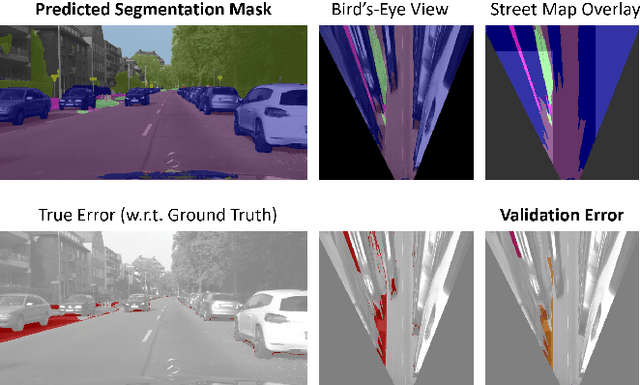
Artificial intelligence for autonomous driving must meet strict requirements on safety and robustness, which motivates the thorough validation of learned models. However, current validation approaches mostly require ground truth data and are thus both cost-intensive and limited in their applicability. We propose to overcome these limitations by a model agnostic validation using a-priori knowledge from street maps. In particular, we show how to validate semantic segmentation masks and demonstrate the potential of our approach using OpenStreetMap. We introduce validation metrics that indicate false positive or negative road segments. Besides the validation approach, we present a method to correct the vehicle's GPS position so that a more accurate localization can be used for the street-map based validation. Lastly, we present quantitative results on the Cityscapes dataset indicating that our validation approach can indeed uncover errors in semantic segmentation masks.
From a Fourier-Domain Perspective on Adversarial Examples to a Wiener Filter Defense for Semantic Segmentation
Dec 02, 2020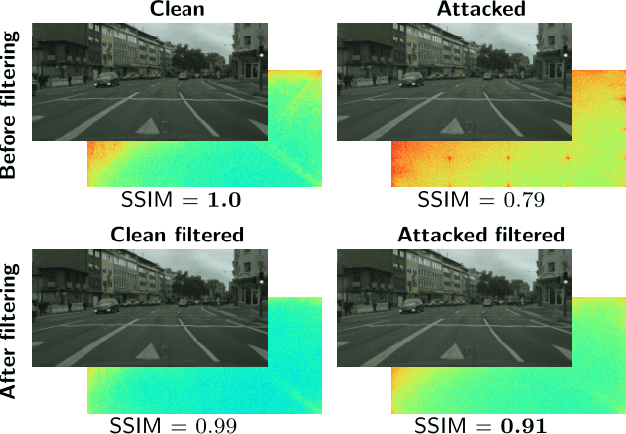
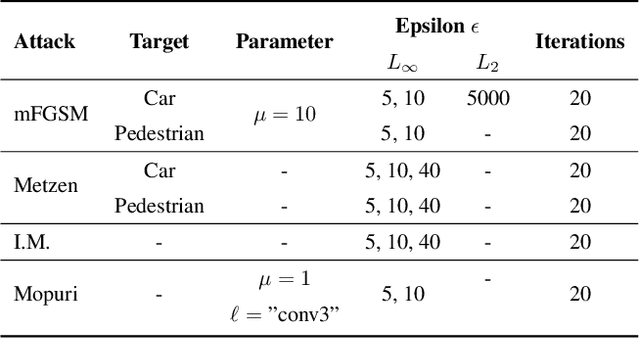
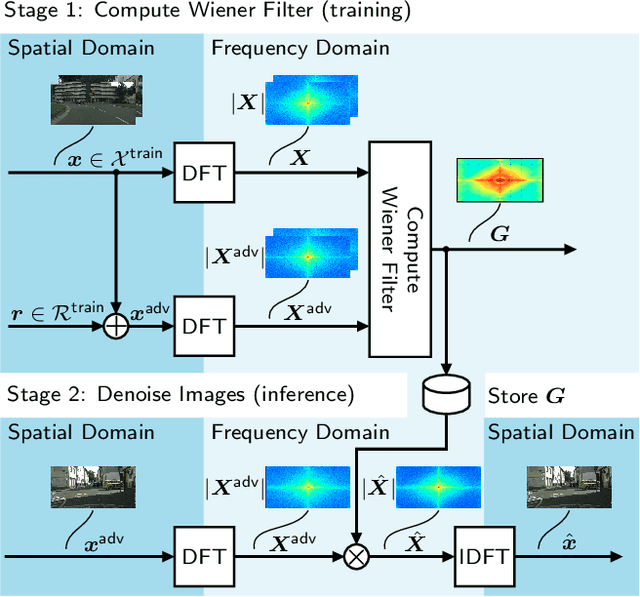
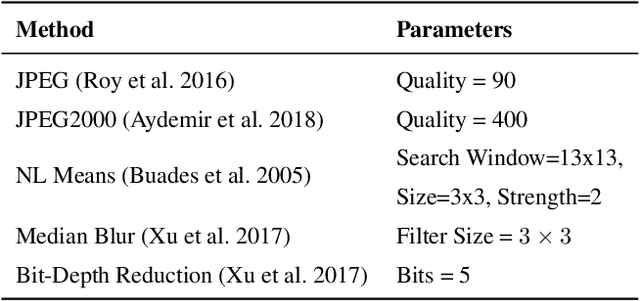
Despite recent advancements, deep neural networks are not robust against adversarial perturbations. Many of the proposed adversarial defense approaches use computationally expensive training mechanisms that do not scale to complex real-world tasks such as semantic segmentation, and offer only marginal improvements. In addition, fundamental questions on the nature of adversarial perturbations and their relation to the network architecture are largely understudied. In this work, we study the adversarial problem from a frequency domain perspective. More specifically, we analyze discrete Fourier transform (DFT) spectra of several adversarial images and report two major findings: First, there exists a strong connection between a model architecture and the nature of adversarial perturbations that can be observed and addressed in the frequency domain. Second, the observed frequency patterns are largely image- and attack-type independent, which is important for the practical impact of any defense making use of such patterns. Motivated by these findings, we additionally propose an adversarial defense method based on the well-known Wiener filters that captures and suppresses adversarial frequencies in a data-driven manner. Our proposed method not only generalizes across unseen attacks but also beats five existing state-of-the-art methods across two models in a variety of attack settings.
Towards Map-Based Validation of Semantic Segmentation Masks
Nov 03, 2020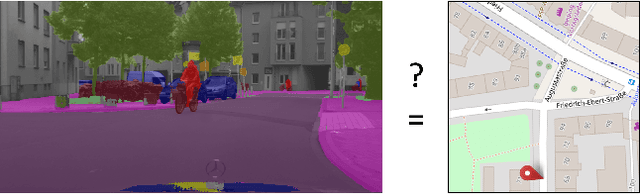
Artificial intelligence for autonomous driving must meet strict requirements on safety and robustness. We propose to validate machine learning models for self-driving vehicles not only with given ground truth labels, but also with additional a-priori knowledge. In particular, we suggest to validate the drivable area in semantic segmentation masks using given street map data. We present first results, which indicate that prediction errors can be uncovered by map-based validation.