Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Map-Based Validation of Semantic Segmentation Masks
Paper and Code
Nov 03, 2020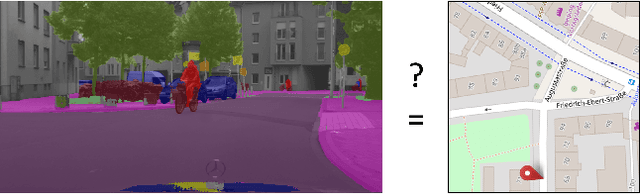
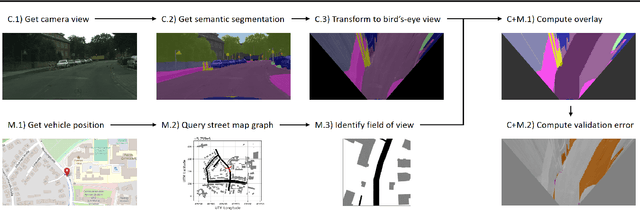
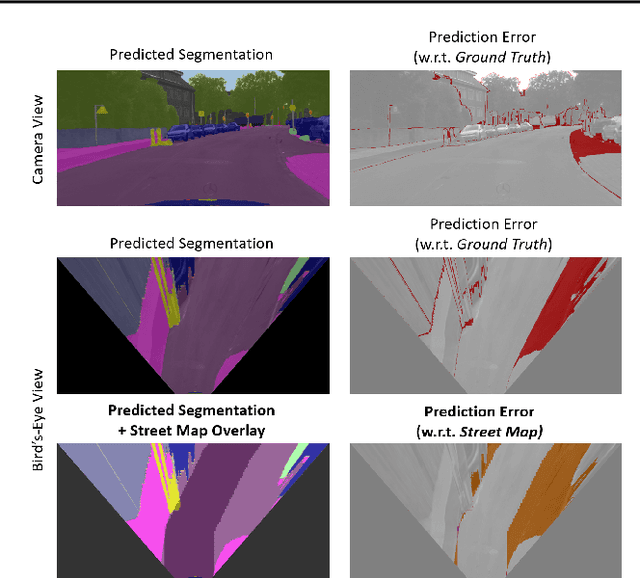
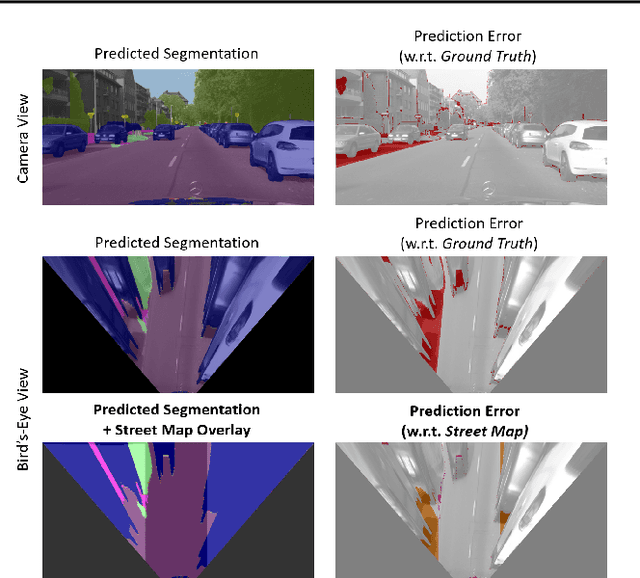
Artificial intelligence for autonomous driving must meet strict requirements on safety and robustness. We propose to validate machine learning models for self-driving vehicles not only with given ground truth labels, but also with additional a-priori knowledge. In particular, we suggest to validate the drivable area in semantic segmentation masks using given street map data. We present first results, which indicate that prediction errors can be uncovered by map-based validation.
View paper on