 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatio-Temporal Attention for Consistent Video Semantic Segmentation in Automated Driving
Feb 10, 2026Deep neural networks, especially transformer-based architectures, have achieved remarkable success in semantic segmentation for environmental perception. However, existing models process video frames independently, thus failing to leverage temporal consistency, which could significantly improve both accuracy and stability in dynamic scenes. In this work, we propose a Spatio-Temporal Attention (STA) mechanism that extends transformer attention blocks to incorporate multi-frame context, enabling robust temporal feature representations for video semantic segmentation. Our approach modifies standard self-attention to process spatio-temporal feature sequences while maintaining computational efficiency and requiring minimal changes to existing architectures. STA demonstrates broad applicability across diverse transformer architectures and remains effective across both lightweight and larger-scale models. A comprehensive evaluation on the Cityscapes and BDD100k datasets shows substantial improvements of 9.20 percentage points in temporal consistency metrics and up to 1.76 percentage points in mean intersection over union compared to single-frame baselines. These results demonstrate STA as an effective architectural enhancement for video-based semantic segmentation applications.
Plants Don't Walk on the Street: Common-Sense Reasoning for Reliable Semantic Segmentation
Apr 19, 2021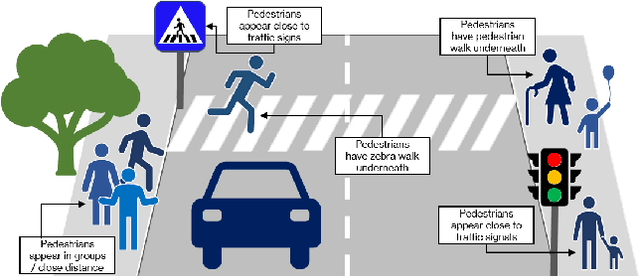

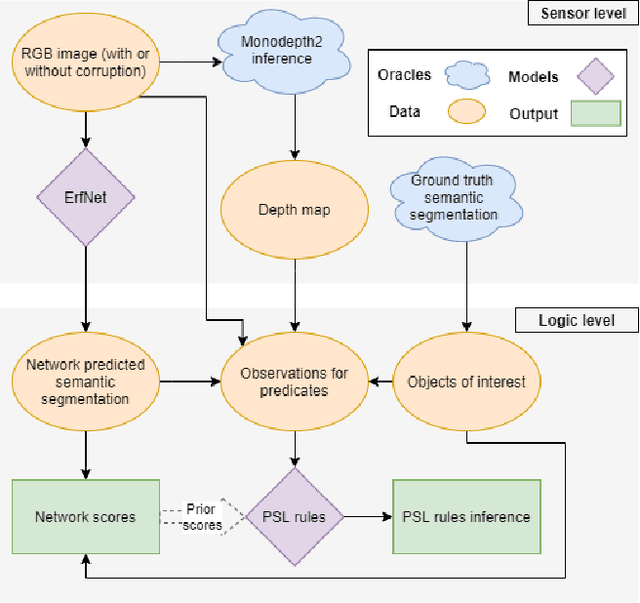

Data-driven sensor interpretation in autonomous driving can lead to highly implausible predictions as can most of the time be verified with common-sense knowledge. However, learning common knowledge only from data is hard and approaches for knowledge integration are an active research area. We propose to use a partly human-designed, partly learned set of rules to describe relations between objects of a traffic scene on a high level of abstraction. In doing so, we improve and robustify existing deep neural networks consuming low-level sensor information. We present an initial study adapting the well-established Probabilistic Soft Logic (PSL) framework to validate and improve on the problem of semantic segmentation. We describe in detail how we integrate common knowledge into the segmentation pipeline using PSL and verify our approach in a set of experiments demonstrating the increase in robustness against several severe image distortions applied to the A2D2 autonomous driving data set.
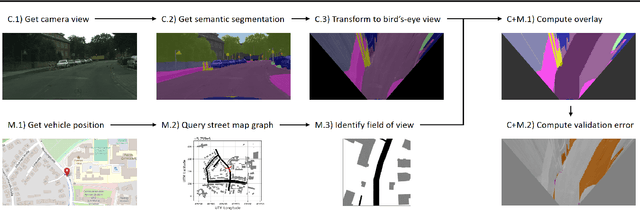
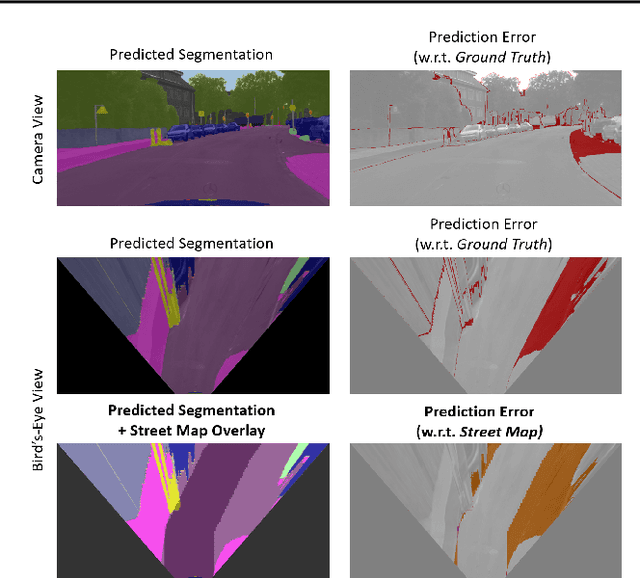
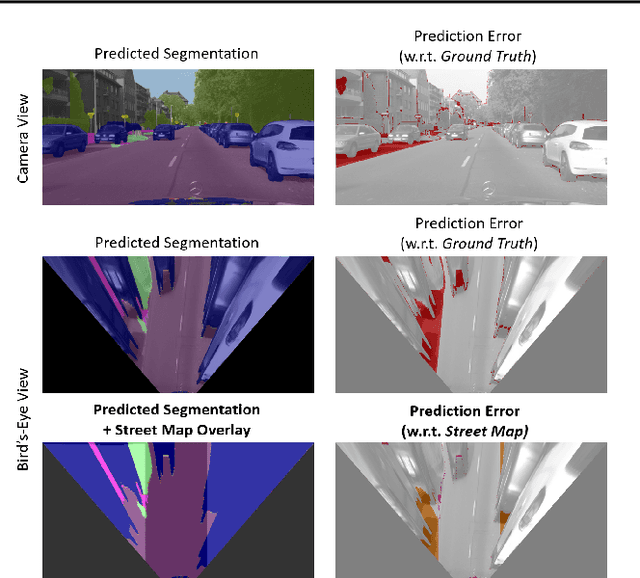
Street-Map Based Validation of Semantic Segmentation in Autonomous Driving
Apr 15, 2021
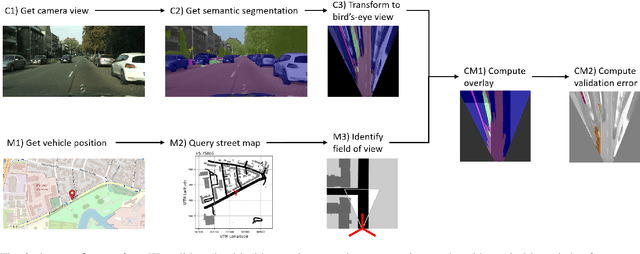
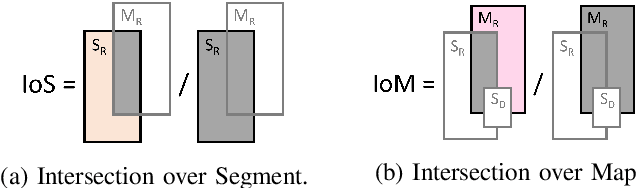
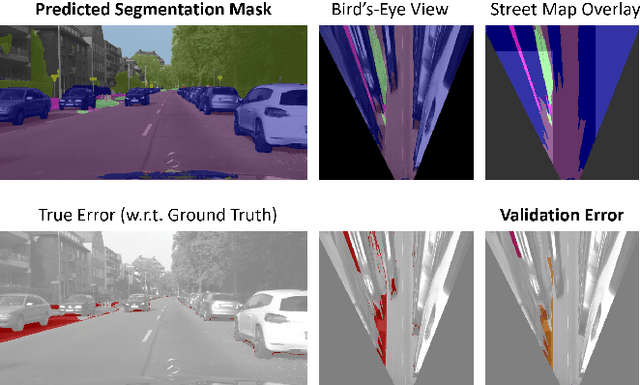
Artificial intelligence for autonomous driving must meet strict requirements on safety and robustness, which motivates the thorough validation of learned models. However, current validation approaches mostly require ground truth data and are thus both cost-intensive and limited in their applicability. We propose to overcome these limitations by a model agnostic validation using a-priori knowledge from street maps. In particular, we show how to validate semantic segmentation masks and demonstrate the potential of our approach using OpenStreetMap. We introduce validation metrics that indicate false positive or negative road segments. Besides the validation approach, we present a method to correct the vehicle's GPS position so that a more accurate localization can be used for the street-map based validation. Lastly, we present quantitative results on the Cityscapes dataset indicating that our validation approach can indeed uncover errors in semantic segmentation masks.
Towards Map-Based Validation of Semantic Segmentation Masks
Nov 03, 2020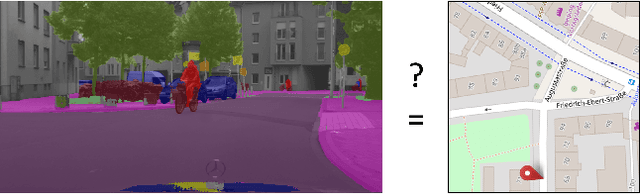
Artificial intelligence for autonomous driving must meet strict requirements on safety and robustness. We propose to validate machine learning models for self-driving vehicles not only with given ground truth labels, but also with additional a-priori knowledge. In particular, we suggest to validate the drivable area in semantic segmentation masks using given street map data. We present first results, which indicate that prediction errors can be uncovered by map-based validation.