 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplaining, Verifying, and Aligning Semantic Hierarchies in Vision-Language Model Embeddings
Mar 26, 2026Vision-language model (VLM) encoders such as CLIP enable strong retrieval and zero-shot classification in a shared image-text embedding space, yet the semantic organization of this space is rarely inspected. We present a post-hoc framework to explain, verify, and align the semantic hierarchies induced by a VLM over a given set of child classes. First, we extract a binary hierarchy by agglomerative clustering of class centroids and name internal nodes by dictionary-based matching to a concept bank. Second, we quantify plausibility by comparing the extracted tree against human ontologies using efficient tree- and edge-level consistency measures, and we evaluate utility via explainable hierarchical tree-traversal inference with uncertainty-aware early stopping (UAES). Third, we propose an ontology-guided post-hoc alignment method that learns a lightweight embedding-space transformation, using UMAP to generate target neighborhoods from a desired hierarchy. Across 13 pretrained VLMs and 4 image datasets, our method finds systematic modality differences: image encoders are more discriminative, while text encoders induce hierarchies that better match human taxonomies. Overall, the results reveal a persistent trade-off between zero-shot accuracy and ontological plausibility and suggest practical routes to improve semantic alignment in shared embedding spaces.
Predictive Photometric Uncertainty in Gaussian Splatting for Novel View Synthesis
Mar 24, 2026Recent advances in 3D Gaussian Splatting have enabled impressive photorealistic novel view synthesis. However, to transition from a pure rendering engine to a reliable spatial map for autonomous agents and safety-critical applications, knowing where the representation is uncertain is as important as the rendering fidelity itself. We bridge this critical gap by introducing a lightweight, plug-and-play framework for pixel-wise, view-dependent predictive uncertainty estimation. Our post-hoc method formulates uncertainty as a Bayesian-regularized linear least-squares optimization over reconstruction residuals. This architecture-agnostic approach extracts a per-primitive uncertainty channel without modifying the underlying scene representation or degrading baseline visual fidelity. Crucially, we demonstrate that providing this actionable reliability signal successfully translates 3D Gaussian splatting into a trustworthy spatial map, further improving state-of-the-art performance across three critical downstream perception tasks: active view selection, pose-agnostic scene change detection, and pose-agnostic anomaly detection.
Out-of-Distribution Object Detection in Street Scenes via Synthetic Outlier Exposure and Transfer Learning
Mar 17, 2026Out-of-distribution (OOD) object detection is an important yet underexplored task. A reliable object detector should be able to handle OOD objects by localizing and correctly classifying them as OOD. However, a critical issue arises when such atypical objects are completely missed by the object detector and incorrectly treated as background. Existing OOD detection approaches in object detection often rely on complex architectures or auxiliary branches and typically do not provide a framework that treats in-distribution (ID) and OOD in a unified way. In this work, we address these limitations by enabling a single detector to detect OOD objects, that are otherwise silently overlooked, alongside ID objects. We present \textbf{SynOE-OD}, a \textbf{Syn}thetic \textbf{O}utlier-\textbf{E}xposure-based \textbf{O}bject \textbf{D}etection framework, that leverages strong generative models, like Stable Diffusion, and Open-Vocabulary Object Detectors (OVODs) to generate semantically meaningful, object-level data that serve as outliers during training. The generated data is used for transfer-learning to establish strong ID task performance and supplement detection models with OOD object detection robustness. Our approach achieves state-of-the-art average precision on an established OOD object detection benchmark, where OVODs, such as GroundingDINO, show limited zero-shot performance in detecting OOD objects in street-scenes.
Probabilistic Label Spreading: Efficient and Consistent Estimation of Soft Labels with Epistemic Uncertainty on Graphs
Feb 04, 2026Safe artificial intelligence for perception tasks remains a major challenge, partly due to the lack of data with high-quality labels. Annotations themselves are subject to aleatoric and epistemic uncertainty, which is typically ignored during annotation and evaluation. While crowdsourcing enables collecting multiple annotations per image to estimate these uncertainties, this approach is impractical at scale due to the required annotation effort. We introduce a probabilistic label spreading method that provides reliable estimates of aleatoric and epistemic uncertainty of labels. Assuming label smoothness over the feature space, we propagate single annotations using a graph-based diffusion method. We prove that label spreading yields consistent probability estimators even when the number of annotations per data point converges to zero. We present and analyze a scalable implementation of our method. Experimental results indicate that, compared to baselines, our approach substantially reduces the annotation budget required to achieve a desired label quality on common image datasets and achieves a new state of the art on the Data-Centric Image Classification benchmark.
Learning to Detect Label Errors by Making Them: A Method for Segmentation and Object Detection Datasets
Aug 25, 2025Recently, detection of label errors and improvement of label quality in datasets for supervised learning tasks has become an increasingly important goal in both research and industry. The consequences of incorrectly annotated data include reduced model performance, biased benchmark results, and lower overall accuracy. Current state-of-the-art label error detection methods often focus on a single computer vision task and, consequently, a specific type of dataset, containing, for example, either bounding boxes or pixel-wise annotations. Furthermore, previous methods are not learning-based. In this work, we overcome this research gap. We present a unified method for detecting label errors in object detection, semantic segmentation, and instance segmentation datasets. In a nutshell, our approach - learning to detect label errors by making them - works as follows: we inject different kinds of label errors into the ground truth. Then, the detection of label errors, across all mentioned primary tasks, is framed as an instance segmentation problem based on a composite input. In our experiments, we compare the label error detection performance of our method with various baselines and state-of-the-art approaches of each task's domain on simulated label errors across multiple tasks, datasets, and base models. This is complemented by a generalization study on real-world label errors. Additionally, we release 459 real label errors identified in the Cityscapes dataset and provide a benchmark for real label error detection in Cityscapes.
LFA applied to CNNs: Efficient Singular Value Decomposition of Convolutional Mappings by Local Fourier Analysis
Jun 05, 2025The singular values of convolutional mappings encode interesting spectral properties, which can be used, e.g., to improve generalization and robustness of convolutional neural networks as well as to facilitate model compression. However, the computation of singular values is typically very resource-intensive. The naive approach involves unrolling the convolutional mapping along the input and channel dimensions into a large and sparse two-dimensional matrix, making the exact calculation of all singular values infeasible due to hardware limitations. In particular, this is true for matrices that represent convolutional mappings with large inputs and a high number of channels. Existing efficient methods leverage the Fast Fourier transformation (FFT) to transform convolutional mappings into the frequency domain, enabling the computation of singular values for matrices representing convolutions with larger input and channel dimensions. For a constant number of channels in a given convolution, an FFT can compute N singular values in O(N log N) complexity. In this work, we propose an approach of complexity O(N) based on local Fourier analysis, which additionally exploits the shift invariance of convolutional operators. We provide a theoretical analysis of our algorithm's runtime and validate its efficiency through numerical experiments. Our results demonstrate that our proposed method is scalable and offers a practical solution to calculate the entire set of singular values - along with the corresponding singular vectors if needed - for high-dimensional convolutional mappings.
Temporal Object Captioning for Street Scene Videos from LiDAR Tracks
May 22, 2025Video captioning models have seen notable advancements in recent years, especially with regard to their ability to capture temporal information. While many research efforts have focused on architectural advancements, such as temporal attention mechanisms, there remains a notable gap in understanding how models capture and utilize temporal semantics for effective temporal feature extraction, especially in the context of Advanced Driver Assistance Systems. We propose an automated LiDAR-based captioning procedure that focuses on the temporal dynamics of traffic participants. Our approach uses a rule-based system to extract essential details such as lane position and relative motion from object tracks, followed by a template-based caption generation. Our findings show that training SwinBERT, a video captioning model, using only front camera images and supervised with our template-based captions, specifically designed to encapsulate fine-grained temporal behavior, leads to improved temporal understanding consistently across three datasets. In conclusion, our results clearly demonstrate that integrating LiDAR-based caption supervision significantly enhances temporal understanding, effectively addressing and reducing the inherent visual/static biases prevalent in current state-of-the-art model architectures.
LiDAR MOT-DETR: A LiDAR-based Two-Stage Transformer for 3D Multiple Object Tracking
May 19, 2025Multi-object tracking from LiDAR point clouds presents unique challenges due to the sparse and irregular nature of the data, compounded by the need for temporal coherence across frames. Traditional tracking systems often rely on hand-crafted features and motion models, which can struggle to maintain consistent object identities in crowded or fast-moving scenes. We present a lidar-based two-staged DETR inspired transformer; a smoother and tracker. The smoother stage refines lidar object detections, from any off-the-shelf detector, across a moving temporal window. The tracker stage uses a DETR-based attention block to maintain tracks across time by associating tracked objects with the refined detections using the point cloud as context. The model is trained on the datasets nuScenes and KITTI in both online and offline (forward peeking) modes demonstrating strong performance across metrics such as ID-switch and multiple object tracking accuracy (MOTA). The numerical results indicate that the online mode outperforms the lidar-only baseline and SOTA models on the nuScenes dataset, with an aMOTA of 0.722 and an aMOTP of 0.475, while the offline mode provides an additional 3 pp aMOTP
On Background Bias of Post-Hoc Concept Embeddings in Computer Vision DNNs
Apr 11, 2025The thriving research field of concept-based explainable artificial intelligence (C-XAI) investigates how human-interpretable semantic concepts embed in the latent spaces of deep neural networks (DNNs). Post-hoc approaches therein use a set of examples to specify a concept, and determine its embeddings in DNN latent space using data driven techniques. This proved useful to uncover biases between different target (foreground or concept) classes. However, given that the background is mostly uncontrolled during training, an important question has been left unattended so far: Are/to what extent are state-of-the-art, data-driven post-hoc C-XAI approaches themselves prone to biases with respect to their backgrounds? E.g., wild animals mostly occur against vegetation backgrounds, and they seldom appear on roads. Even simple and robust C-XAI methods might abuse this shortcut for enhanced performance. A dangerous performance degradation of the concept-corner cases of animals on the road could thus remain undiscovered. This work validates and thoroughly confirms that established Net2Vec-based concept segmentation techniques frequently capture background biases, including alarming ones, such as underperformance on road scenes. For the analysis, we compare 3 established techniques from the domain of background randomization on >50 concepts from 2 datasets, and 7 diverse DNN architectures. Our results indicate that even low-cost setups can provide both valuable insight and improved background robustness.
Shape Bias and Robustness Evaluation via Cue Decomposition for Image Classification and Segmentation
Mar 16, 2025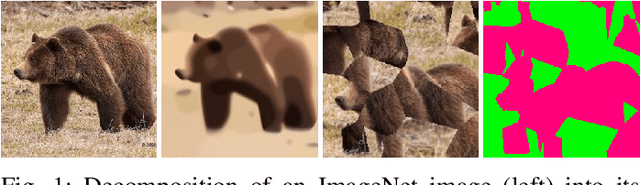
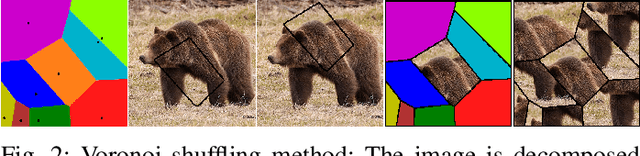
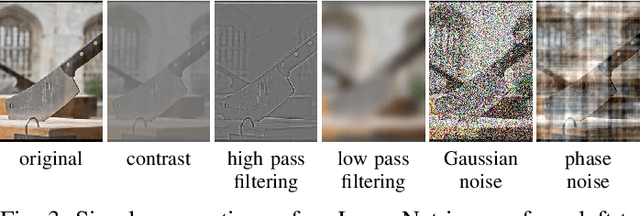
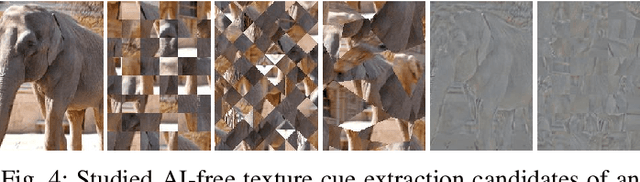
Previous works studied how deep neural networks (DNNs) perceive image content in terms of their biases towards different image cues, such as texture and shape. Previous methods to measure shape and texture biases are typically style-transfer-based and limited to DNNs for image classification. In this work, we provide a new evaluation procedure consisting of 1) a cue-decomposition method that comprises two AI-free data pre-processing methods extracting shape and texture cues, respectively, and 2) a novel cue-decomposition shape bias evaluation metric that leverages the cue-decomposition data. For application purposes we introduce a corresponding cue-decomposition robustness metric that allows for the estimation of the robustness of a DNN w.r.t. image corruptions. In our numerical experiments, our findings for biases in image classification DNNs align with those of previous evaluation metrics. However, our cue-decomposition robustness metric shows superior results in terms of estimating the robustness of DNNs. Furthermore, our results for DNNs on the semantic segmentation datasets Cityscapes and ADE20k for the first time shed light into the biases of semantic segmentation DNNs.