 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensitivity analysis of AI-based algorithms for autonomous driving on optical wavefront aberrations induced by the windshield
Aug 19, 2023



Autonomous driving perception techniques are typically based on supervised machine learning models that are trained on real-world street data. A typical training process involves capturing images with a single car model and windshield configuration. However, deploying these trained models on different car types can lead to a domain shift, which can potentially hurt the neural networks performance and violate working ADAS requirements. To address this issue, this paper investigates the domain shift problem further by evaluating the sensitivity of two perception models to different windshield configurations. This is done by evaluating the dependencies between neural network benchmark metrics and optical merit functions by applying a Fourier optics based threat model. Our results show that there is a performance gap introduced by windshields and existing optical metrics used for posing requirements might not be sufficient.
Inspect, Understand, Overcome: A Survey of Practical Methods for AI Safety
Apr 29, 2021The use of deep neural networks (DNNs) in safety-critical applications like mobile health and autonomous driving is challenging due to numerous model-inherent shortcomings. These shortcomings are diverse and range from a lack of generalization over insufficient interpretability to problems with malicious inputs. Cyber-physical systems employing DNNs are therefore likely to suffer from safety concerns. In recent years, a zoo of state-of-the-art techniques aiming to address these safety concerns has emerged. This work provides a structured and broad overview of them. We first identify categories of insufficiencies to then describe research activities aiming at their detection, quantification, or mitigation. Our paper addresses both machine learning experts and safety engineers: The former ones might profit from the broad range of machine learning topics covered and discussions on limitations of recent methods. The latter ones might gain insights into the specifics of modern ML methods. We moreover hope that our contribution fuels discussions on desiderata for ML systems and strategies on how to propel existing approaches accordingly.
The Vulnerability of Semantic Segmentation Networks to Adversarial Attacks in Autonomous Driving: Enhancing Extensive Environment Sensing
Jan 13, 2021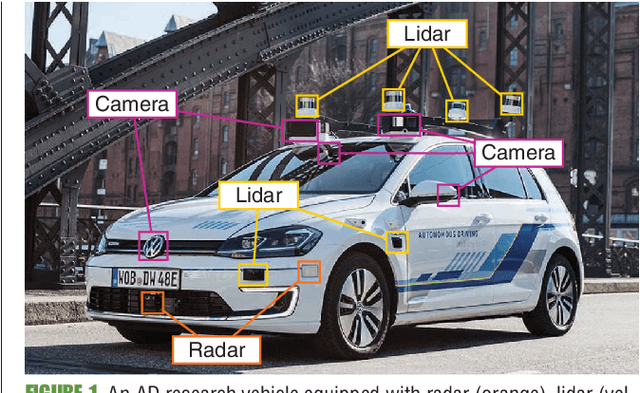

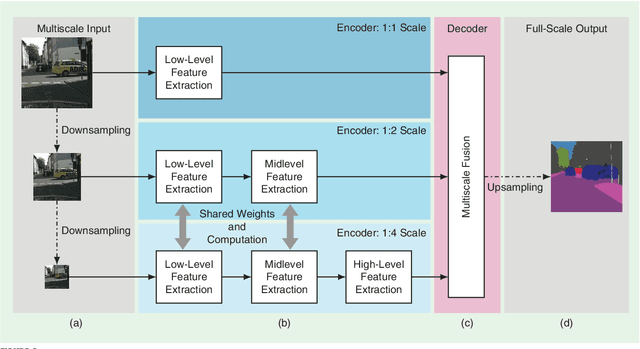
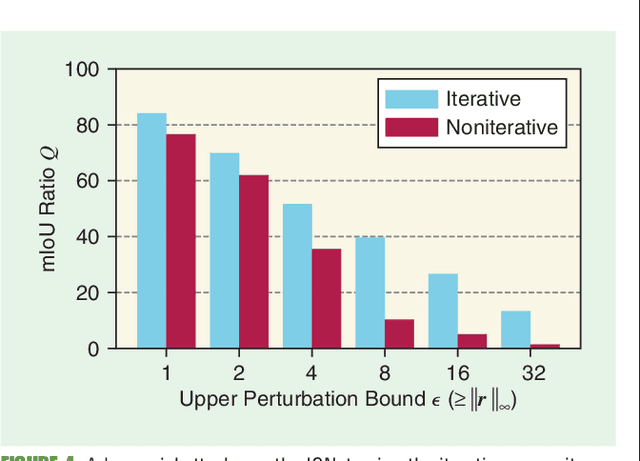
Enabling autonomous driving (AD) can be considered one of the biggest challenges in today's technology. AD is a complex task accomplished by several functionalities, with environment perception being one of its core functions. Environment perception is usually performed by combining the semantic information captured by several sensors, i.e., lidar or camera. The semantic information from the respective sensor can be extracted by using convolutional neural networks (CNNs) for dense prediction. In the past, CNNs constantly showed state-of-the-art performance on several vision-related tasks, such as semantic segmentation of traffic scenes using nothing but the red-green-blue (RGB) images provided by a camera. Although CNNs obtain state-of-the-art performance on clean images, almost imperceptible changes to the input, referred to as adversarial perturbations, may lead to fatal deception. The goal of this article is to illuminate the vulnerability aspects of CNNs used for semantic segmentation with respect to adversarial attacks, and share insights into some of the existing known adversarial defense strategies. We aim to clarify the advantages and disadvantages associated with applying CNNs for environment perception in AD to serve as a motivation for future research in this field.
From a Fourier-Domain Perspective on Adversarial Examples to a Wiener Filter Defense for Semantic Segmentation
Dec 02, 2020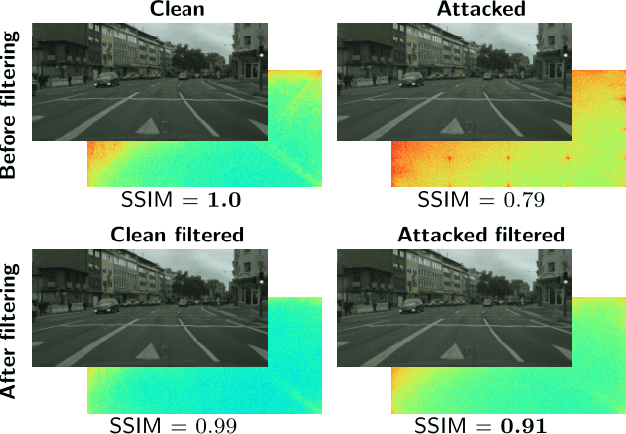
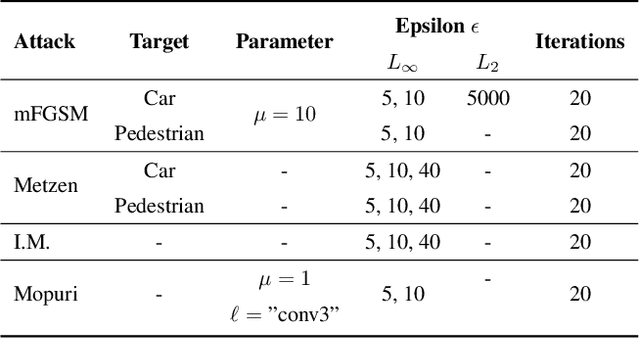
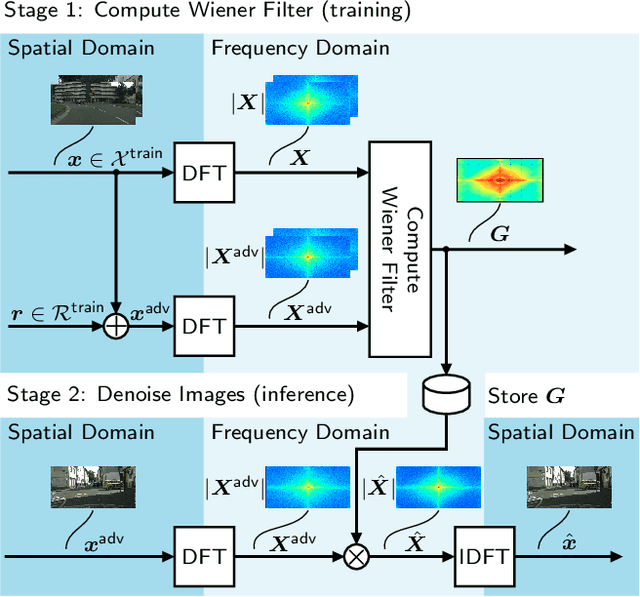
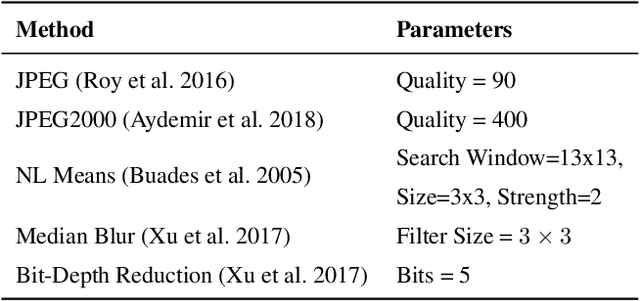
Despite recent advancements, deep neural networks are not robust against adversarial perturbations. Many of the proposed adversarial defense approaches use computationally expensive training mechanisms that do not scale to complex real-world tasks such as semantic segmentation, and offer only marginal improvements. In addition, fundamental questions on the nature of adversarial perturbations and their relation to the network architecture are largely understudied. In this work, we study the adversarial problem from a frequency domain perspective. More specifically, we analyze discrete Fourier transform (DFT) spectra of several adversarial images and report two major findings: First, there exists a strong connection between a model architecture and the nature of adversarial perturbations that can be observed and addressed in the frequency domain. Second, the observed frequency patterns are largely image- and attack-type independent, which is important for the practical impact of any defense making use of such patterns. Motivated by these findings, we additionally propose an adversarial defense method based on the well-known Wiener filters that captures and suppresses adversarial frequencies in a data-driven manner. Our proposed method not only generalizes across unseen attacks but also beats five existing state-of-the-art methods across two models in a variety of attack settings.
A Self-Supervised Feature Map Augmentation (FMA) Loss and Combined Augmentations Finetuning to Efficiently Improve the Robustness of CNNs
Dec 02, 2020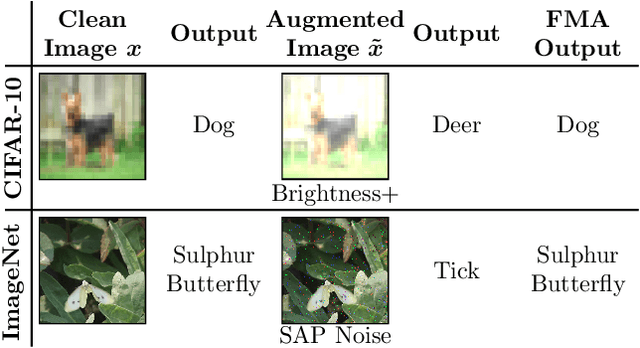
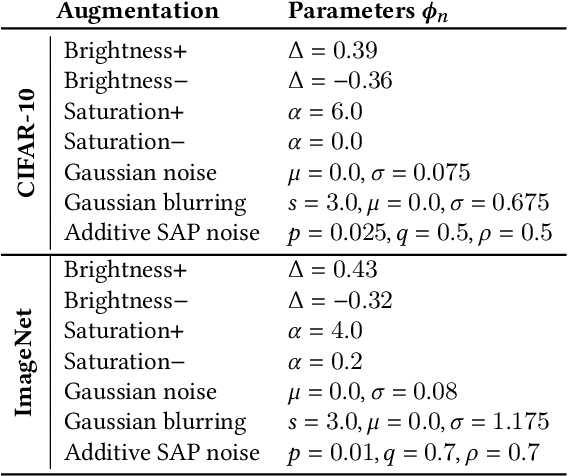
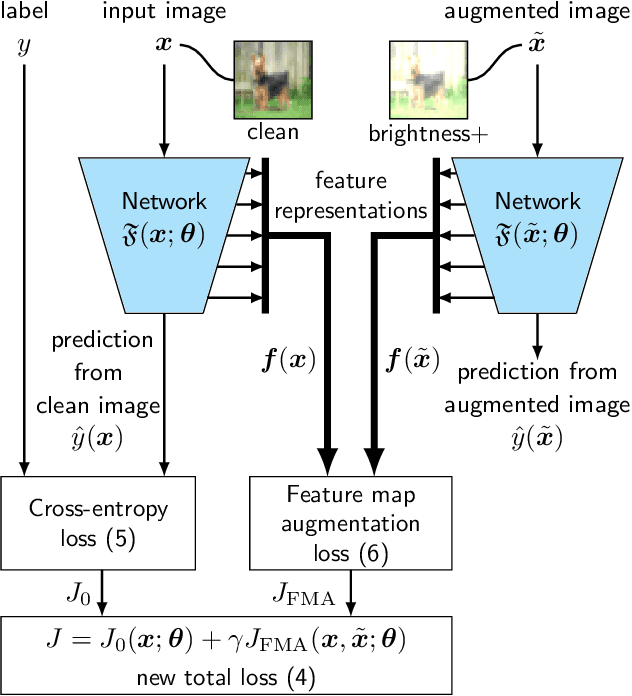
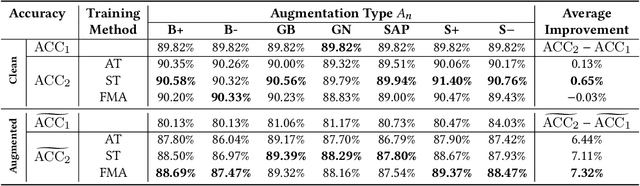
Deep neural networks are often not robust to semantically-irrelevant changes in the input. In this work we address the issue of robustness of state-of-the-art deep convolutional neural networks (CNNs) against commonly occurring distortions in the input such as photometric changes, or the addition of blur and noise. These changes in the input are often accounted for during training in the form of data augmentation. We have two major contributions: First, we propose a new regularization loss called feature-map augmentation (FMA) loss which can be used during finetuning to make a model robust to several distortions in the input. Second, we propose a new combined augmentations (CA) finetuning strategy, that results in a single model that is robust to several augmentation types at the same time in a data-efficient manner. We use the CA strategy to improve an existing state-of-the-art method called stability training (ST). Using CA, on an image classification task with distorted images, we achieve an accuracy improvement of on average 8.94% with FMA and 8.86% with ST absolute on CIFAR-10 and 8.04% with FMA and 8.27% with ST absolute on ImageNet, compared to 1.98% and 2.12%, respectively, with the well known data augmentation method, while keeping the clean baseline performance.
Risk Assessment for Machine Learning Models
Nov 09, 2020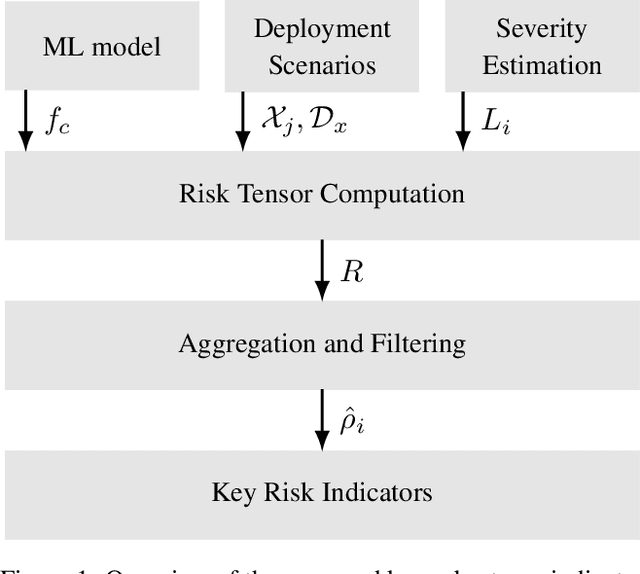
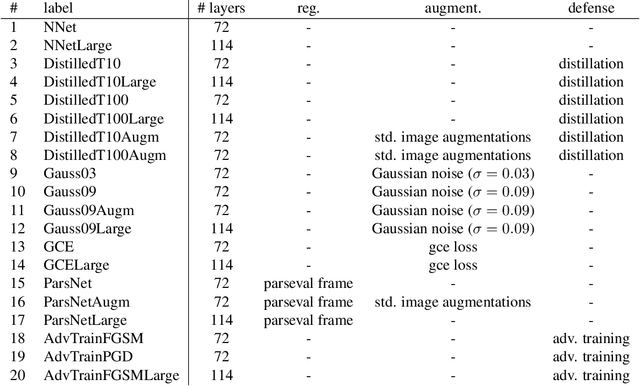
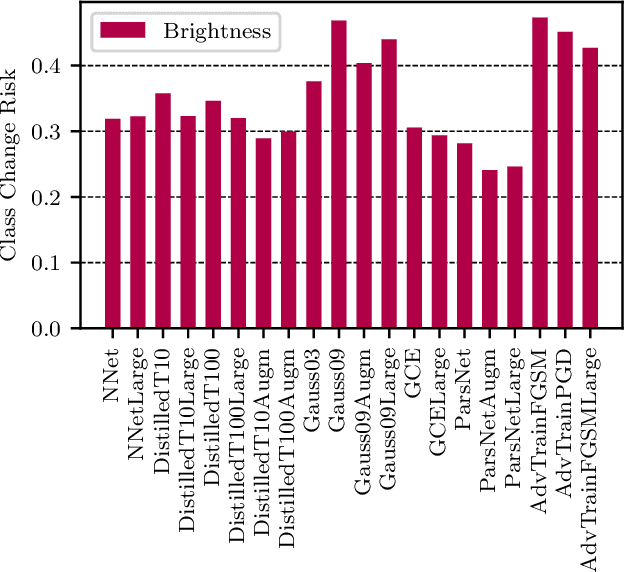
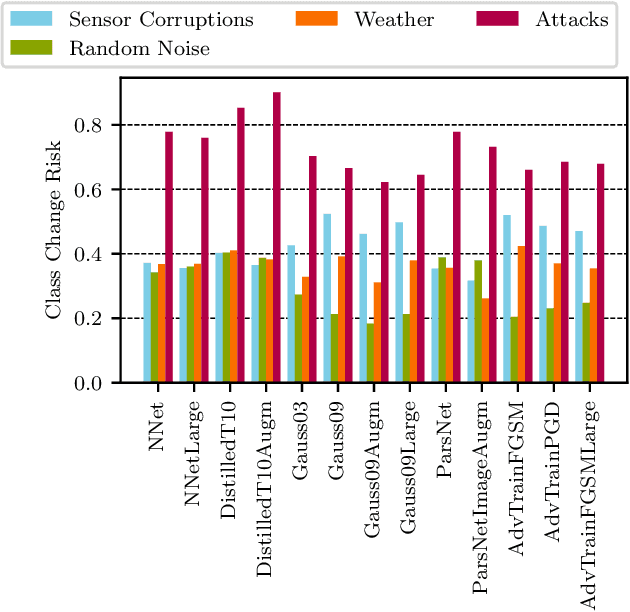
In this paper we propose a framework for assessing the risk associated with deploying a machine learning model in a specified environment. For that we carry over the risk definition from decision theory to machine learning. We develop and implement a method that allows to define deployment scenarios, test the machine learning model under the conditions specified in each scenario, and estimate the damage associated with the output of the machine learning model under test. Using the likelihood of each scenario together with the estimated damage we define \emph{key risk indicators} of a machine learning model. The definition of scenarios and weighting by their likelihood allows for standardized risk assessment in machine learning throughout multiple domains of application. In particular, in our framework, the robustness of a machine learning model to random input corruptions, distributional shifts caused by a changing environment, and adversarial perturbations can be assessed.