 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy Optimal Traversal Between Hover Waypoints for Lift+Cruise Electric Powered Aircraft
Nov 13, 2024Advanced Air Mobility aircraft require energy efficient flight plans to be economically viable. This paper defines minimum energy direct trajectories between waypoints for Lift+Cruise electric Vertical Take-Off and Landing (eVTOL) aircraft. Energy consumption is optimized over accelerated and cruise flight profiles with consideration of mode transitions. Because eVTOL operations start and end in hover for vertical take-off and landing, hover waypoints are utilized. Energy consumption is modeled as a function of airspeed for each flight mode, providing the basis to prove energy optimality for multi-mode traversal. Wind magnitude and direction dictate feasibility of straight-line traversal because Lift+Cruise aircraft point into the relative wind direction while hovering but also have a maximum heading rate constraint. Energy and power use for an experimentally validated QuadPlane small eVTOL aircraft are characterized with respect to airspeed and acceleration in all flight modes. Optimal QuadPlane traversals are presented. Constraints on acceleration and wind are derived for straight-line QuadPlane traversal. Results show an optimal QuadPlane $500m$ traversal between hover waypoints saves $71\%$ energy compared to pure vertical flight traversal for a representative case study with a direct $4m/s$ crosswind. Energy optimal eVTOL direct trajectory definition with transitions to and from hover is novel to this work. Future work should model three-dimensional flight and wind as well as optimize maneuver primitives when required.
The Michigan Robotics Undergraduate Curriculum: Defining the Discipline of Robotics for Equity and Excellence
Aug 14, 2023The Robotics Major at the University of Michigan was successfully launched in the 2022-23 academic year as an innovative step forward to better serve students, our communities, and our society. Building on our guiding principle of "Robotics with Respect" and our larger Robotics Pathways model, the Michigan Robotics Major was designed to define robotics as a true academic discipline with both equity and excellence as our highest priorities. Understanding that talent is equally distributed but opportunity is not, the Michigan Robotics Major has embraced an adaptable curriculum that is accessible through a diversity of student pathways and enables successful and sustained career-long participation in robotics, AI, and automation professions. The results after our planning efforts (2019-22) and first academic year (2022-23) have been highly encouraging: more than 100 students declared Robotics as their major, completion of the Robotics major by our first two graduates, soaring enrollments in our Robotics classes, thriving partnerships with Historically Black Colleges and Universities. This document provides our original curricular proposal for the Robotics Undergraduate Program at the University of Michigan, submitted to the Michigan Association of State Universities in April 2022 and approved in June 2022. The dissemination of our program design is in the spirit of continued growth for higher education towards realizing equity and excellence. The most recent version of this document is also available on Google Docs through this link: https://ocj.me/robotics_major
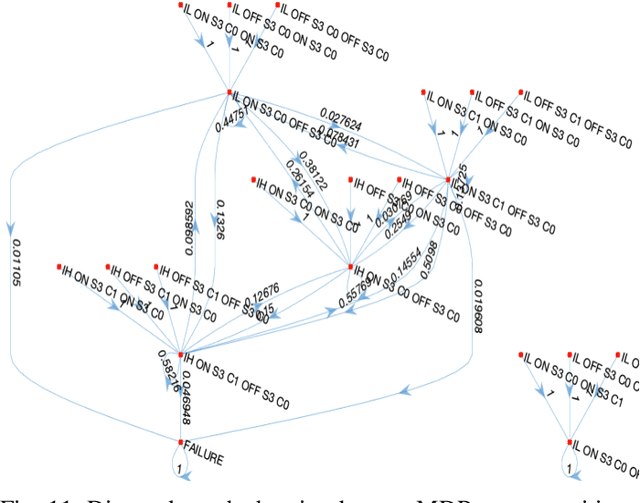
Investigation of risk-aware MDP and POMDP contingency management autonomy for UAS
Apr 03, 2023



Unmanned aircraft systems (UAS) are being increasingly adopted for various applications. The risk UAS poses to people and property must be kept to acceptable levels. This paper proposes risk-aware contingency management autonomy to prevent an accident in the event of component malfunction, specifically propulsion unit failure and/or battery degradation. The proposed autonomy is modeled as a Markov Decision Process (MDP) whose solution is a contingency management policy that appropriately executes emergency landing, flight termination or continuation of planned flight actions. Motivated by the potential for errors in fault/failure indicators, partial observability of the MDP state space is investigated. The performance of optimal policies is analyzed over varying observability conditions in a high-fidelity simulator. Results indicate that both partially observable MDP (POMDP) and maximum a posteriori MDP policies performed similarly over different state observability criteria, given the nearly deterministic state transition model.
Wind Tunnel Testing and Aerodynamic Characterization of a QuadPlane Uncrewed Aircraft System
Jan 29, 2023Electric Vertical Takeoff and Landing (eVTOL) vehicles will open new opportunities in aviation. This paper describes the design and wind tunnel analysis of an eVTOL uncrewed aircraft system (UAS) prototype with a traditional aircraft wing, tail, and puller motor along with four vertical thrust pusher motors. Vehicle design and construction are summarized. Dynamic thrust from propulsion modules is experimentally determined at different airspeeds over a large sweep of propeller angles of attack. Wind tunnel tests with the vehicle prototype cover a suite of hover, transition and cruise flight conditions. Net aerodynamic forces and moments are distinctly computed and compared for plane, quadrotor and hybrid flight modes. Coefficient-based models are developed. Polynomial curve fits accurately capture observed data over all test configurations. To our knowledge, the presented wind tunnel experimental analysis for a multi-mode eVTOL platform is novel. Increased drag and reduced dynamic thrust likely due to flow interactions will be important to address in future designs.
Quadrotor Formation Flying Resilient to Abrupt Vehicle Failures via a Fluid Flow Navigation Function
Mar 03, 2022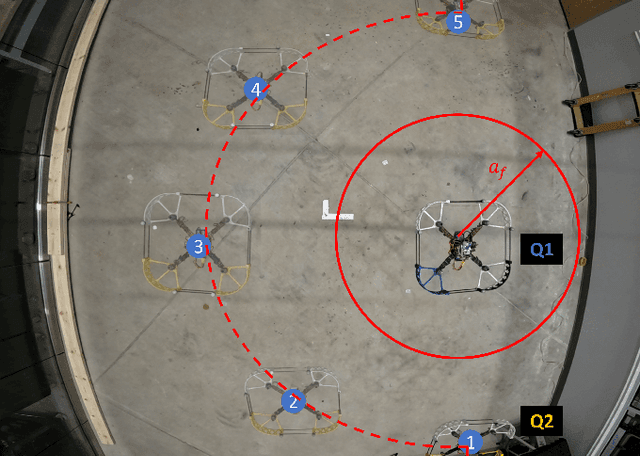
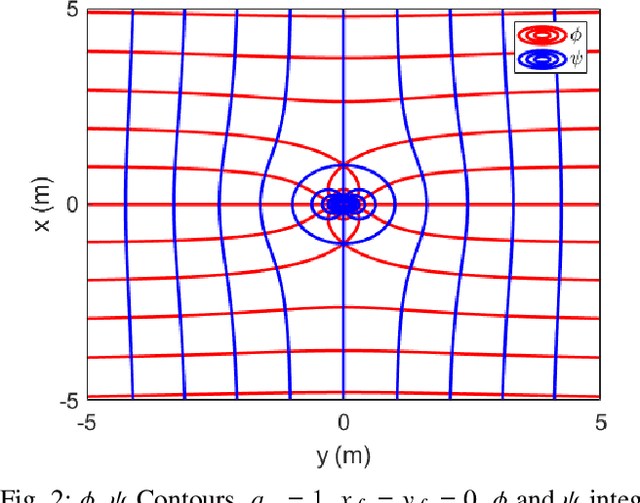
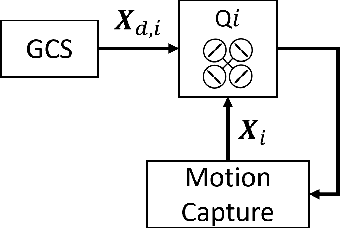
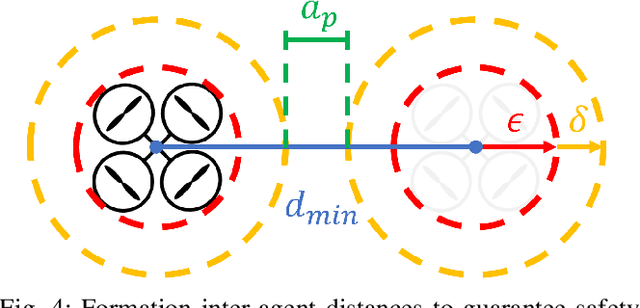
This paper develops and experimentally evaluates a navigation function for quadrotor formation flight that is resilient to abrupt quadrotor failures and other obstacles. The navigation function is based on modeling healthy quadrotors as particles in an ideal fluid flow. We provide three key contributions: (i) A Containment Exclusion Mode (CEM) safety theorem and proof which guarantees safety and formally specifies a minimum safe distance between quadrotors in formation, (ii) A real-time, computationally efficient CEM navigation algorithm, (iii) Simulation and experimental algorithm validation. Simulations were first performed with a team of six virtual quadrotors to demonstrate velocity tracking via dynamic slide speed, maintaining sufficient inter-agent distances, and operating in real-time. Flight tests with a team of two custom quadrotors were performed in an indoor motion capture flight facility, successfully validating that the navigation algorithm can handle non-trivial bounded tracking errors while guaranteeing safety.
Development, Implementation, and Experimental Outdoor Evaluation of Quadcopter Controllers for Computationally Limited Embedded Systems
Jun 01, 2021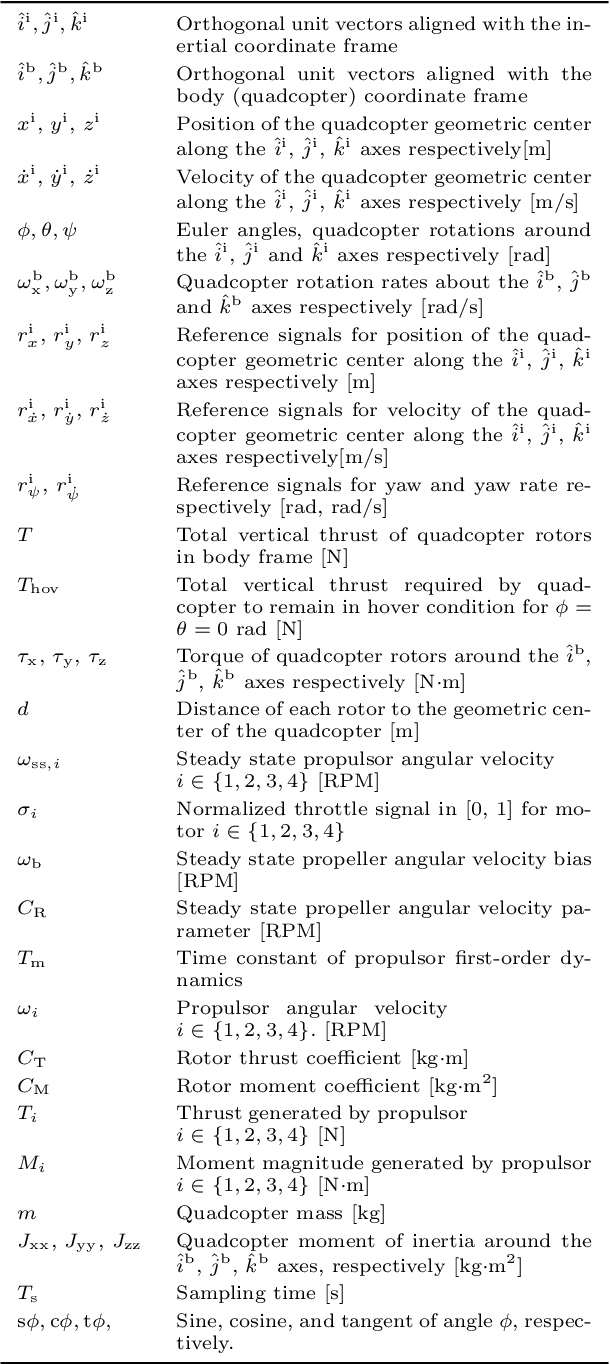
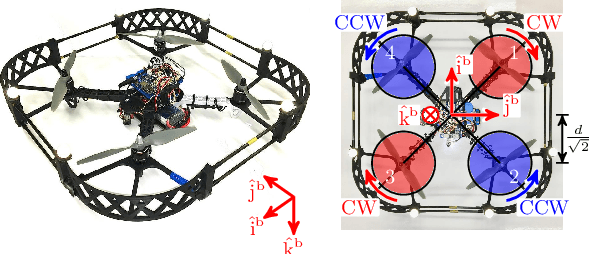
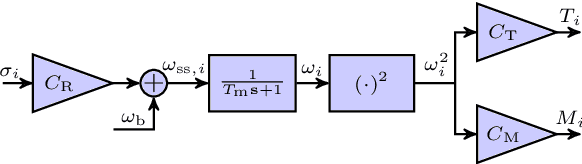
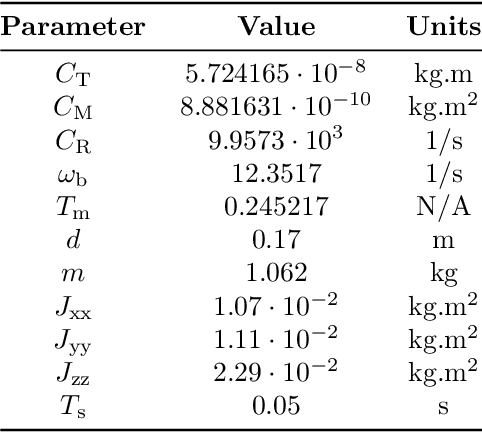
Quadcopters are increasingly used for applications ranging from hobby to industrial products and services. This paper serves as a tutorial on the design, simulation, implementation, and experimental outdoor testing of digital quadcopter flight controllers, including Explicit Model Predictive Control, Linear Quadratic Regulator, and Proportional Integral Derivative. A quadcopter was flown in an outdoor testing facility and made to track an inclined, circular path at different tangential velocities under ambient wind conditions. Controller performance was evaluated via multiple metrics, such as position tracking error, velocity tracking error, and onboard computation time. Challenges related to the use of computationally limited embedded hardware and flight in an outdoor environment are addressed with proposed solutions.
Coupling Intent and Action for Pedestrian Crossing Behavior Prediction
May 10, 2021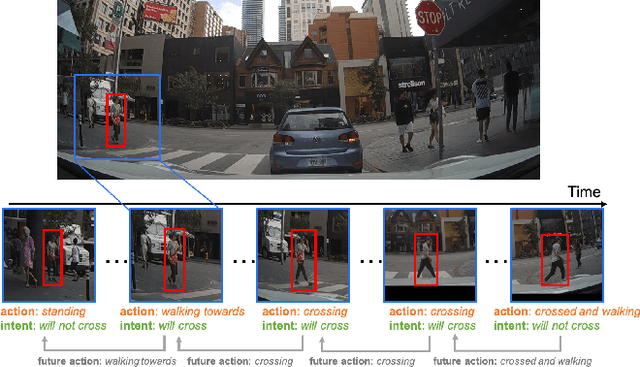
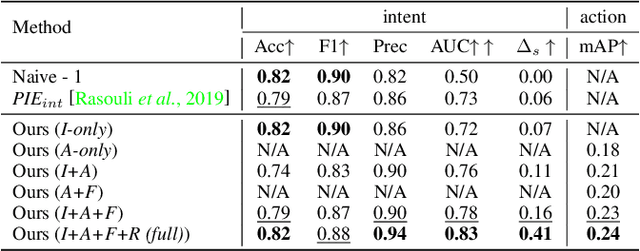
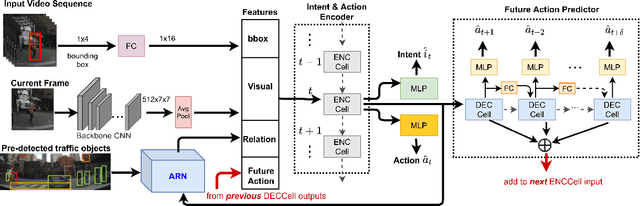
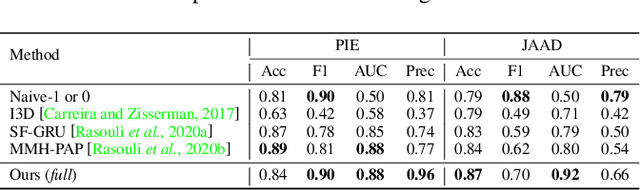
Accurate prediction of pedestrian crossing behaviors by autonomous vehicles can significantly improve traffic safety. Existing approaches often model pedestrian behaviors using trajectories or poses but do not offer a deeper semantic interpretation of a person's actions or how actions influence a pedestrian's intention to cross in the future. In this work, we follow the neuroscience and psychological literature to define pedestrian crossing behavior as a combination of an unobserved inner will (a probabilistic representation of binary intent of crossing vs. not crossing) and a set of multi-class actions (e.g., walking, standing, etc.). Intent generates actions, and the future actions in turn reflect the intent. We present a novel multi-task network that predicts future pedestrian actions and uses predicted future action as a prior to detect the present intent and action of the pedestrian. We also designed an attention relation network to incorporate external environmental contexts thus further improve intent and action detection performance. We evaluated our approach on two naturalistic driving datasets, PIE and JAAD, and extensive experiments show significantly improved and more explainable results for both intent detection and action prediction over state-of-the-art approaches. Our code is available at: https://github.com/umautobots/pedestrian_intent_action_detection.
Prognostics-Informed Battery Reconfiguration in a Multi-Battery Small UAS Energy System
Mar 02, 2021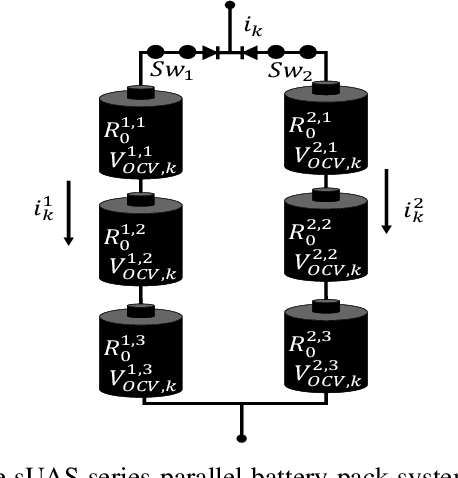
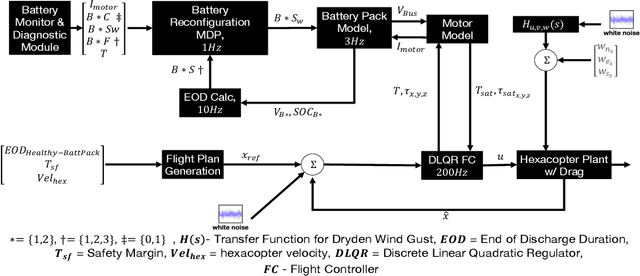

Batteries have been identified as one most likely small UAS (sUAS) components to fail in flight. sUAS safety will therefore be improved with redundant or backup batteries. This paper presents a prognostics-informed Markov Decision Process (MDP) model for managing multi-battery reconfiguration for sUAS missions. Typical lithium polymer (Lipo) battery properties are experimentally characterized and used in Monte Carlo simulations to establish battery dynamics in sUAS flights of varying duration. Case studies illustrate the trade off between multi-battery system increased complexity/weight and resilience to non-ideal battery performance.
Smart Black Box 2.0: Efficient High-bandwidth Driving Data Collection based on Video Anomalies
Feb 09, 2021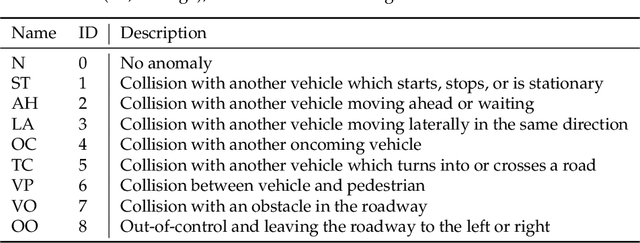
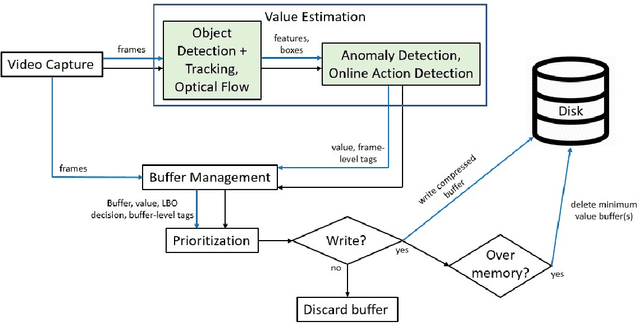

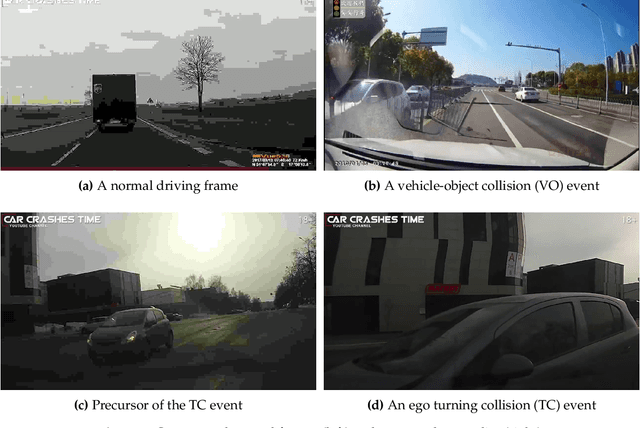
Autonomous vehicles require fleet-wide data collection for continuous algorithm development and validation. The Smart Black Box (SBB) intelligent event data recorder has been proposed as a system for prioritized high-bandwidth data capture. This paper extends the SBB by applying anomaly detection and action detection methods for generalized event-of-interest (EOI) detection. An updated SBB pipeline is proposed for the real-time capture of driving video data. A video dataset is constructed to evaluate the SBB on real-world data for the first time. SBB performance is assessed by comparing the compression of normal and anomalous data and by comparing our prioritized data recording with a FIFO strategy. Results show that SBB data compression can increase the anomalous-to-normal memory ratio by ~25%, while the prioritized recording strategy increases the anomalous-to-normal count ratio when compared to a FIFO strategy. We compare the real-world dataset SBB results to a baseline SBB given ground-truth anomaly labels and conclude that improved general EOI detection methods will greatly improve SBB performance.
BiTraP: Bi-directional Pedestrian Trajectory Prediction with Multi-modal Goal Estimation
Jul 29, 2020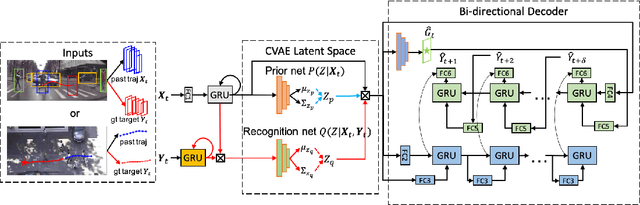
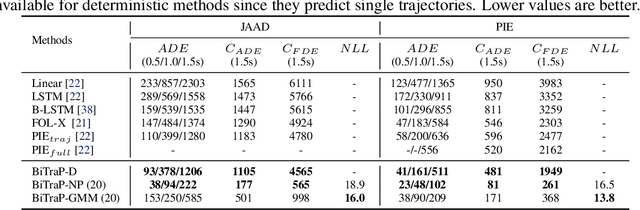
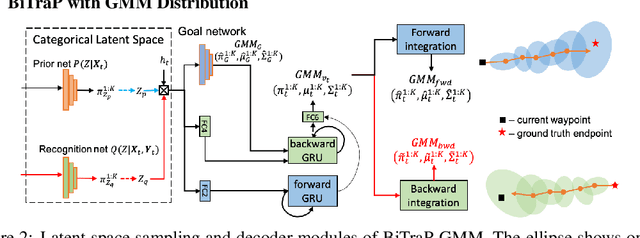
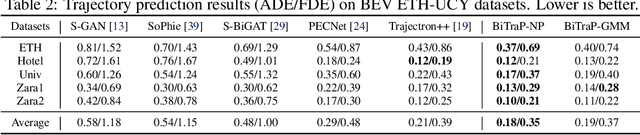
Pedestrian trajectory prediction is an essential task in robotic applications such as autonomous driving and robot navigation. State-of-the-art trajectory predictors use a conditional variational autoencoder (CVAE) with recurrent neural networks (RNNs) to encode observed trajectories and decode multi-modal future trajectories. This process can suffer from accumulated errors over long prediction horizons (>=2 seconds). This paper presents BiTraP, a goal-conditioned bi-directional multi-modal trajectory prediction method based on the CVAE. BiTraP estimates the goal (end-point) of trajectories and introduces a novel bi-directional decoder to improve longer-term trajectory prediction accuracy. Extensive experiments show that BiTraP generalizes to both first-person view (FPV) and bird's-eye view (BEV) scenarios and outperforms state-of-the-art results by ~10-50%. We also show that different choices of non-parametric versus parametric target models in the CVAE directly influence the predicted multi-modal trajectory distributions. These results provide guidance on trajectory predictor design for robotic applications such as collision avoidance and navigation systems.