 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoupling Intent and Action for Pedestrian Crossing Behavior Prediction
May 10, 2021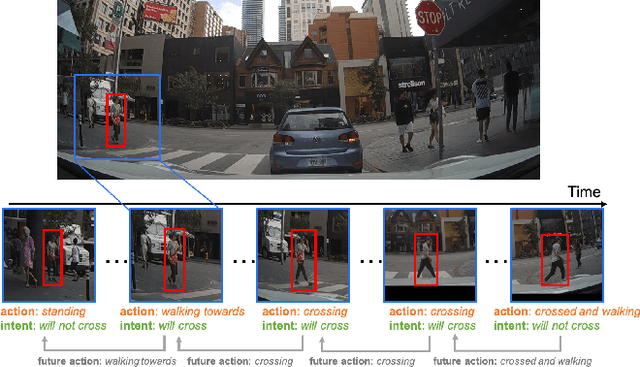
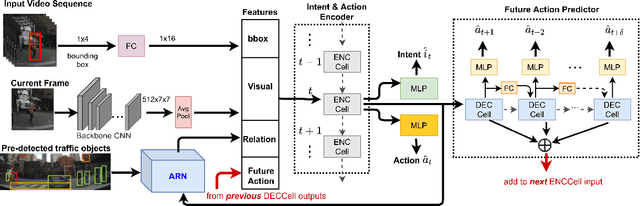
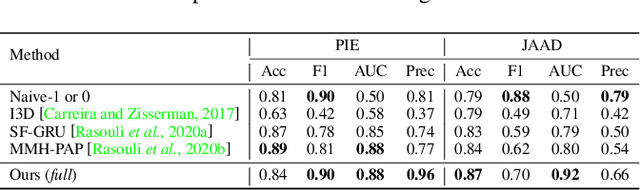
Accurate prediction of pedestrian crossing behaviors by autonomous vehicles can significantly improve traffic safety. Existing approaches often model pedestrian behaviors using trajectories or poses but do not offer a deeper semantic interpretation of a person's actions or how actions influence a pedestrian's intention to cross in the future. In this work, we follow the neuroscience and psychological literature to define pedestrian crossing behavior as a combination of an unobserved inner will (a probabilistic representation of binary intent of crossing vs. not crossing) and a set of multi-class actions (e.g., walking, standing, etc.). Intent generates actions, and the future actions in turn reflect the intent. We present a novel multi-task network that predicts future pedestrian actions and uses predicted future action as a prior to detect the present intent and action of the pedestrian. We also designed an attention relation network to incorporate external environmental contexts thus further improve intent and action detection performance. We evaluated our approach on two naturalistic driving datasets, PIE and JAAD, and extensive experiments show significantly improved and more explainable results for both intent detection and action prediction over state-of-the-art approaches. Our code is available at: https://github.com/umautobots/pedestrian_intent_action_detection.