 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRACF: A Resilient Autonomous Car Framework with Object Distance Correction
Apr 14, 2026Autonomous vehicles are increasingly deployed in safety-critical applications, where sensing failures or cyberphysical attacks can lead to unsafe operations resulting in human loss and/or severe physical damages. Reliable real-time perception is therefore critically important for their safe operations and acceptability. For example, vision-based distance estimation is vulnerable to environmental degradation and adversarial perturbations, and existing defenses are often reactive and too slow to promptly mitigate their impacts on safe operations. We present a Resilient Autonomous Car Framework (RACF) that incorporates an Object Distance Correction Algorithm (ODCA) to improve perception-layer robustness through redundancy and diversity across a depth camera, LiDAR, and physics-based kinematics. Within this framework, when obstacle distance estimation produced by depth camera is inconsistent, a cross-sensor gate activates the correction algorithm to fix the detected inconsistency. We have experiment with the proposed resilient car framework and evaluate its performance on a testbed implemented using the Quanser QCar 2 platform. The presented framework achieved up to 35% RMSE reduction under strong corruption and improves stop compliance and braking latency, while operating in real time. These results demonstrate a practical and lightweight approach to resilient perception for safety-critical autonomous driving
Affine Transformable Unmanned Ground Vehicle
Feb 07, 2026This paper develops the proof of concept for a novel affine transformable unmanned ground vehicle (ATUGV) with the capability of safe and aggressive deformation while carrying multiple payloads. The ATUGV is a multi-body system with mobile robots that can be used to power the ATUGV morphable motion, powered cells to enclose the mobile robots, unpowered cells to contain payloads, and a deformable structure to integrate cells through bars and joints. The objective is that all powered and unpowered cells motion can safely track a desired affine transformation, where an affine transformation can be decomposed into translation, rigid body rotation, and deformation. To this end, the paper first uses a deep neural network to structure cell interconnection in such a way that every cell can freely move over the deformation plane, and the entire structure can reconfigurably deform to track a desired affine transformation. Then, the mobile robots, contained by the powered cells and stepper motors, regulating the connections of the powered and unpowered cells, design the proper controls so that all cells safely track the desired affine transformation. The functionality of the proposed ATUGV is validated through hardware experimentation and simulation.
VR-Based Control of Multi-Copter Operation
May 28, 2025We aim to use virtual reality (VR) to improve the spatial awareness of pilots by real-time scanning of the environment around the drone using onboard sensors, live streaming of this environment to a VR headset, and rendering a virtual representation of the drone and its environment for the pilot. This way, the pilot can see the immediate environment of the drone up close from a third-person perspective, as opposed to the first-person perspective that most drone cameras provide. This provides much more information about the drone surroundings for the pilot while operating the drone than existing teleoperation solutions. Previous solutions using VR have relied upon pre-made designs of the environment, which makes it difficult to adapt to changing environments. Our solution, in contrast, scans the environment as you fly, making it much more flexible for use in unknown environments.
Quadcopter Team Configurable Motion Guided by a Quadruped
Mar 20, 2024The paper focuses on modeling and experimental evaluation of a quadcopter team configurable coordination guided by a single quadruped robot. We consider the quadcopter team as particles of a two-dimensional deformable body and propose a two-dimensional affine transformation model for safe and collision-free configurable coordination of this heterogeneous robotic system. The proposed affine transformation is decomposed into translation, that is specified by the quadruped global position, and configurable motion of the quadcopters, which is determined by a nonsingular Jacobian matrix so that the quadcopter team can safely navigate a constrained environment while avoiding collision. We propose two methods to experimentally evaluate the proposed heterogeneous robot coordination model. The first method measures real positions of quadcopters, quadruped, and environmental objects all with respect to the global coordinate system. On the other hand, the second method measures position with respect to the local coordinate system fixed on the dog robot which in turn enables safe planning the Jacobian matrix of the quadcopter team while the world is virtually approached the robotic system.
Sandwich Approach for Motion Planning and Control
Sep 28, 2023



This paper develops a new approach for robot motion planning and control in obstacle-laden environments that is inspired by fundamentals of fluid mechanics. For motion planning, we propose a novel transformation between motion space, with arbitrary obstacles of random sizes and shapes, and an obstacle-free planning space with geodesically-varying distances and constrained transitions. We then obtain robot desired trajectory by A* searching over a uniform grid distributed over the planning space. We show that implementing the A* search over the planning space can generate shorter paths when compared to the existing A* searching over the motion space. For trajectory tracking, we propose an MPC-based trajectory tracking control, with linear equality and inequality safety constraints, enforcing the safety requirements of planning and control.
Multi-Layer Continuum Deformation Optimization of Multi-Agent Systems
Apr 13, 2023



This paper studies the problem of safe and optimal continuum deformation of a large-scale multi-agent system (MAS). We present a novel approach for MAS continuum deformation coordination that aims to achieve safe and efficient agent movement using a leader-follower multi-layer hierarchical optimization framework with a single input layer, multiple hidden layers, and a single output layer. The input layer receives the reference (material) positions of the primary leaders, the hidden layers compute the desired positions of the interior leader agents and followers, and the output layer computes the nominal position of the MAS configuration. By introducing a lower bound on the major principles of the strain field of the MAS deformation, we obtain linear inequality safety constraints and ensure inter-agent collision avoidance. The continuum deformation optimization is formulated as a quadratic programming problem. It consists of the following components: (i) decision variables that represent the weights in the first hidden layer; (ii) a quadratic cost function that penalizes deviation of the nominal MAS trajectory from the desired MAS trajectory; and (iii) inequality safety constraints that ensure inter-agent collision avoidance. To validate the proposed approach, we simulate and present the results of continuum deformation on a large-scale quadcopter team tracking a desired helix trajectory, demonstrating improvements in safety and efficiency.
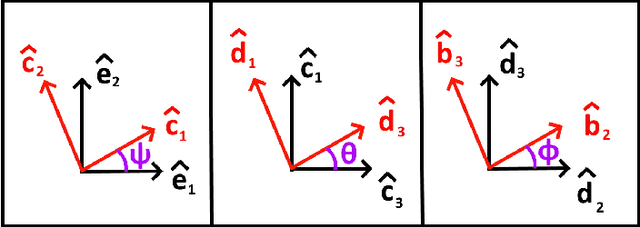
Quadcopter Tracking Using Euler-Angle-Free Flatness-Based Control
Dec 03, 2022



Quadcopter trajectory tracking control has been extensively investigated and implemented in the past. Available controls mostly use the Euler angle standards to describe the quadcopters rotational kinematics and dynamics. As a result, the same rotation can be translated into different roll, pitch, and yaw angles because there are multiple Euler angle standards for characterization of rotation in a 3-dimensional motion space. Additionally, it is computationally expensive to convert a quadcopters orientation to the associated roll, pitch, and yaw angles, which may make it difficult to track quick and aggressive trajectories. To address these issues, this paper will develop a flatness-based trajectory tracking control without using Euler angles. We assess and test the proposed controls performance in the Gazebo simulation environment and contrast its functionality with the existing Mellinger controller, which has been widely adopted by the robotics and unmanned aerial system (UAS) communities.
Fast and Safe Aerial Payload Transport in Urban Areas
Jun 21, 2022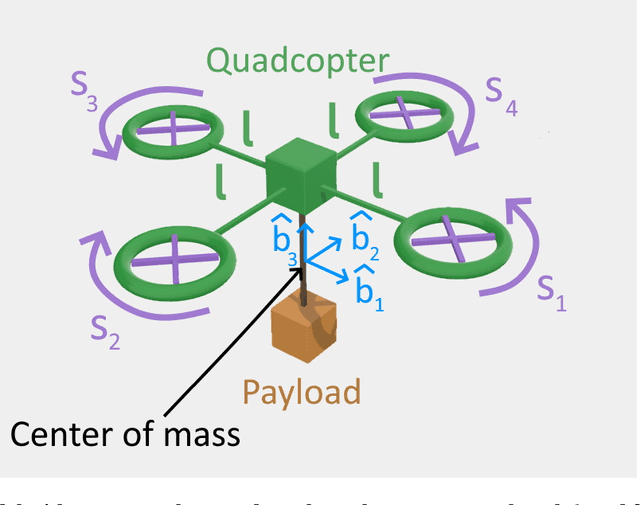
This paper studies the problem of fast and safe aerial payload transport by a single quadcopter in urban areas. The quadcopter payload system (QPS) is considered as a rigid body and modeled with a nonlinear dynamics. The urban area is modeled as an obstacle-laden environment with obstacle geometries obtained by incorporating realistic LIDAR data. Our approach for payload transport is decomposed into high-level motion planning and low-level trajectory control. For the low-level trajectory tracking, a feedback linearization control is applied to stably track the desired trajectory of the quadcopter. For high-level motion planning, we integrate A* search and polynomial planning to define a safe trajectory for the quadcopter assuring collision avoidance, boundedness of the quadcopter rotor speeds and tracking error, and fast arrival to a target destination from an arbitrary initial location.
Quadrotor Formation Flying Resilient to Abrupt Vehicle Failures via a Fluid Flow Navigation Function
Mar 03, 2022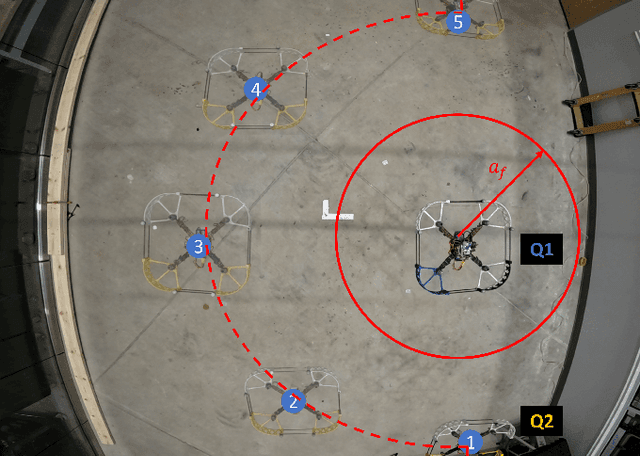
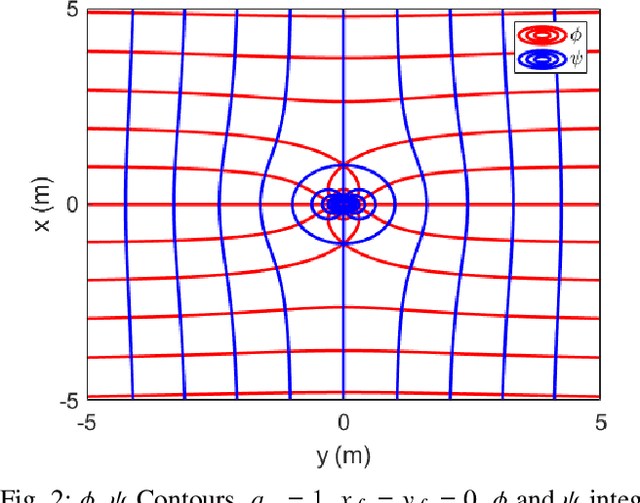
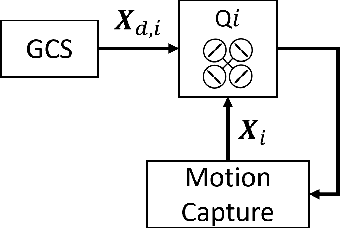
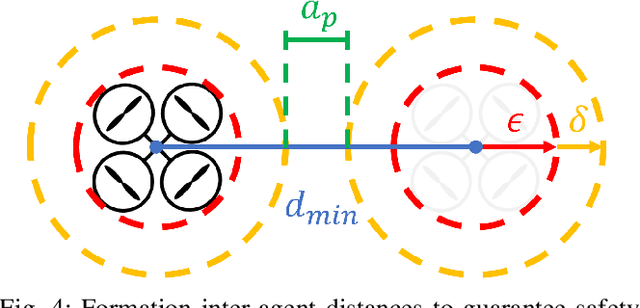
This paper develops and experimentally evaluates a navigation function for quadrotor formation flight that is resilient to abrupt quadrotor failures and other obstacles. The navigation function is based on modeling healthy quadrotors as particles in an ideal fluid flow. We provide three key contributions: (i) A Containment Exclusion Mode (CEM) safety theorem and proof which guarantees safety and formally specifies a minimum safe distance between quadrotors in formation, (ii) A real-time, computationally efficient CEM navigation algorithm, (iii) Simulation and experimental algorithm validation. Simulations were first performed with a team of six virtual quadrotors to demonstrate velocity tracking via dynamic slide speed, maintaining sufficient inter-agent distances, and operating in real-time. Flight tests with a team of two custom quadrotors were performed in an indoor motion capture flight facility, successfully validating that the navigation algorithm can handle non-trivial bounded tracking errors while guaranteeing safety.
Real-Time Deployment of a Large-Scale Multi-Quadcopter System
Jan 25, 2022This paper presents a continuum mechanics-based approach for real-time deployment (RTD) of a multi-quadcopter system between moving initial and final configurations arbitrarily distributed in a 3-D motion space. The proposed RTD problem is decomposed into spatial planning, temporal planning and acquisition sub-problems. For the spatial planning, the RTD desired coordination is defined by integrating (i) rigid-body rotation, (ii) one-dimensional homogeneous deformation, and (ii) one-dimensional heterogeneous coordination such that necessary conditions for inter-agent collision avoidance between every two quadcopter UAVs are satisfied. By the RTD temporal planning, this paper suffices the inter-agent collision avoidance between every two individual quadcopters, and assures the boundedness of the rotor angular speeds for every individual quadcopter. For the RTD acquisition, each quadcopter modeled by a nonlinear dynamics applies a nonlinear control to stably and safely track the desired RTD trajectory such that the angular speeds of each quadcopter remain bounded and do not exceed a certain upper limit.