 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuadcopter Tracking Using Euler-Angle-Free Flatness-Based Control
Dec 03, 2022



Quadcopter trajectory tracking control has been extensively investigated and implemented in the past. Available controls mostly use the Euler angle standards to describe the quadcopters rotational kinematics and dynamics. As a result, the same rotation can be translated into different roll, pitch, and yaw angles because there are multiple Euler angle standards for characterization of rotation in a 3-dimensional motion space. Additionally, it is computationally expensive to convert a quadcopters orientation to the associated roll, pitch, and yaw angles, which may make it difficult to track quick and aggressive trajectories. To address these issues, this paper will develop a flatness-based trajectory tracking control without using Euler angles. We assess and test the proposed controls performance in the Gazebo simulation environment and contrast its functionality with the existing Mellinger controller, which has been widely adopted by the robotics and unmanned aerial system (UAS) communities.
Fast and Safe Aerial Payload Transport in Urban Areas
Jun 21, 2022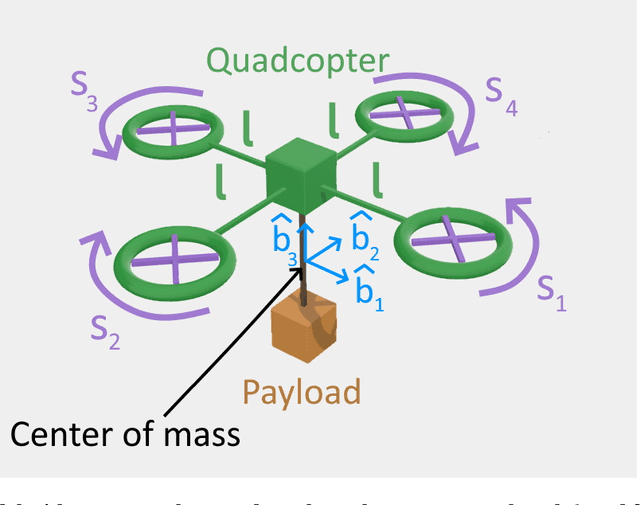
This paper studies the problem of fast and safe aerial payload transport by a single quadcopter in urban areas. The quadcopter payload system (QPS) is considered as a rigid body and modeled with a nonlinear dynamics. The urban area is modeled as an obstacle-laden environment with obstacle geometries obtained by incorporating realistic LIDAR data. Our approach for payload transport is decomposed into high-level motion planning and low-level trajectory control. For the low-level trajectory tracking, a feedback linearization control is applied to stably track the desired trajectory of the quadcopter. For high-level motion planning, we integrate A* search and polynomial planning to define a safe trajectory for the quadcopter assuring collision avoidance, boundedness of the quadcopter rotor speeds and tracking error, and fast arrival to a target destination from an arbitrary initial location.