 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Safe Aerial Payload Transport in Urban Areas
Paper and Code
Jun 21, 2022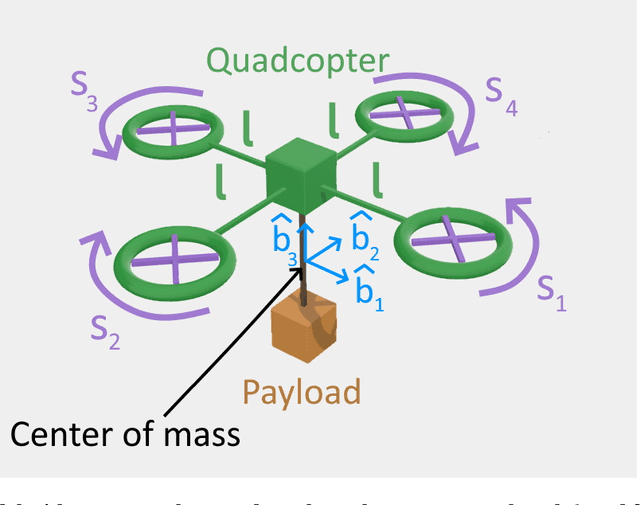
This paper studies the problem of fast and safe aerial payload transport by a single quadcopter in urban areas. The quadcopter payload system (QPS) is considered as a rigid body and modeled with a nonlinear dynamics. The urban area is modeled as an obstacle-laden environment with obstacle geometries obtained by incorporating realistic LIDAR data. Our approach for payload transport is decomposed into high-level motion planning and low-level trajectory control. For the low-level trajectory tracking, a feedback linearization control is applied to stably track the desired trajectory of the quadcopter. For high-level motion planning, we integrate A* search and polynomial planning to define a safe trajectory for the quadcopter assuring collision avoidance, boundedness of the quadcopter rotor speeds and tracking error, and fast arrival to a target destination from an arbitrary initial location.