 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Layer Continuum Deformation Optimization of Multi-Agent Systems
Apr 13, 2023



This paper studies the problem of safe and optimal continuum deformation of a large-scale multi-agent system (MAS). We present a novel approach for MAS continuum deformation coordination that aims to achieve safe and efficient agent movement using a leader-follower multi-layer hierarchical optimization framework with a single input layer, multiple hidden layers, and a single output layer. The input layer receives the reference (material) positions of the primary leaders, the hidden layers compute the desired positions of the interior leader agents and followers, and the output layer computes the nominal position of the MAS configuration. By introducing a lower bound on the major principles of the strain field of the MAS deformation, we obtain linear inequality safety constraints and ensure inter-agent collision avoidance. The continuum deformation optimization is formulated as a quadratic programming problem. It consists of the following components: (i) decision variables that represent the weights in the first hidden layer; (ii) a quadratic cost function that penalizes deviation of the nominal MAS trajectory from the desired MAS trajectory; and (iii) inequality safety constraints that ensure inter-agent collision avoidance. To validate the proposed approach, we simulate and present the results of continuum deformation on a large-scale quadcopter team tracking a desired helix trajectory, demonstrating improvements in safety and efficiency.
Fast and Safe Aerial Payload Transport in Urban Areas
Jun 21, 2022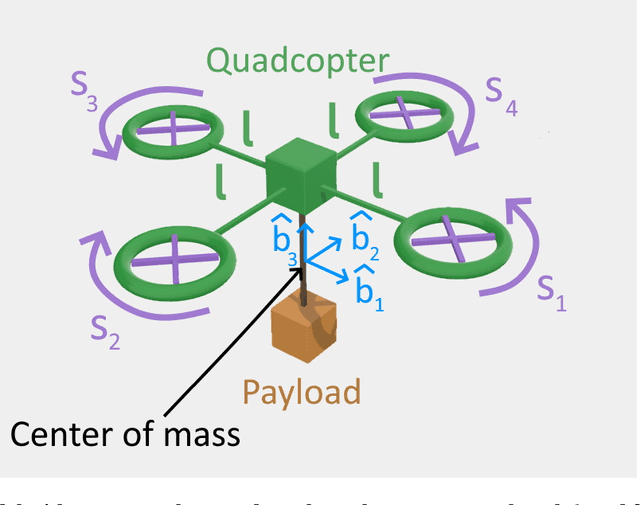
This paper studies the problem of fast and safe aerial payload transport by a single quadcopter in urban areas. The quadcopter payload system (QPS) is considered as a rigid body and modeled with a nonlinear dynamics. The urban area is modeled as an obstacle-laden environment with obstacle geometries obtained by incorporating realistic LIDAR data. Our approach for payload transport is decomposed into high-level motion planning and low-level trajectory control. For the low-level trajectory tracking, a feedback linearization control is applied to stably track the desired trajectory of the quadcopter. For high-level motion planning, we integrate A* search and polynomial planning to define a safe trajectory for the quadcopter assuring collision avoidance, boundedness of the quadcopter rotor speeds and tracking error, and fast arrival to a target destination from an arbitrary initial location.
Quadrotor Formation Flying Resilient to Abrupt Vehicle Failures via a Fluid Flow Navigation Function
Mar 03, 2022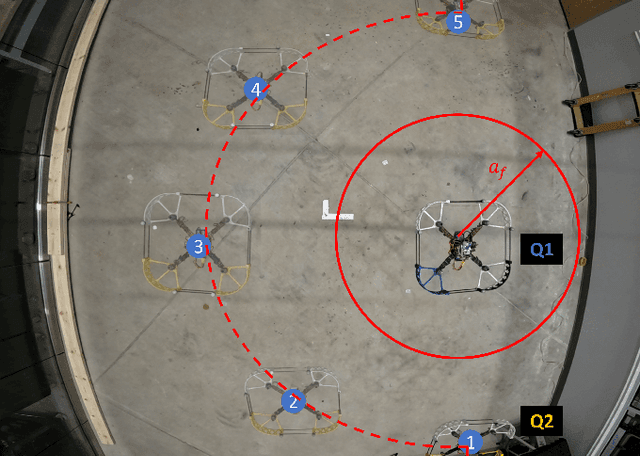
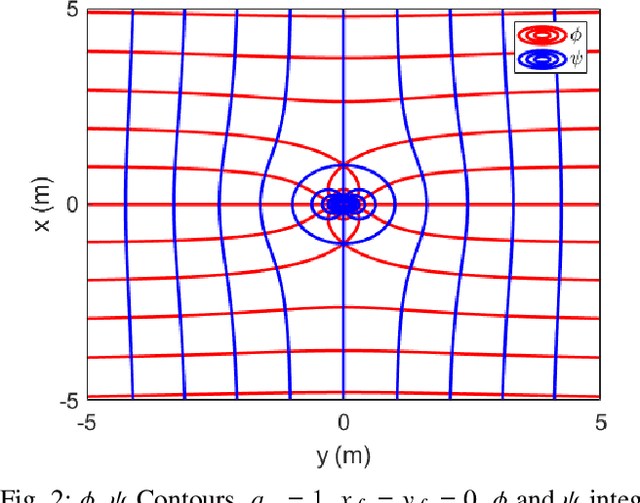
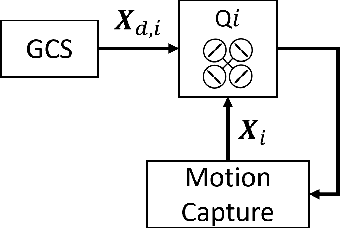
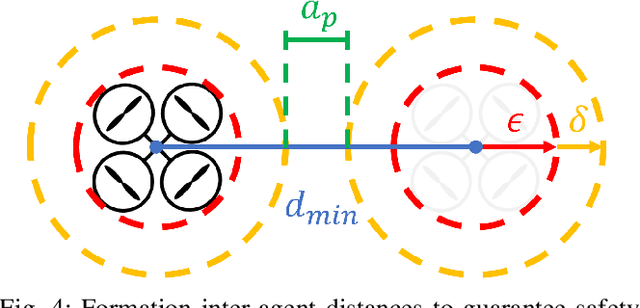
This paper develops and experimentally evaluates a navigation function for quadrotor formation flight that is resilient to abrupt quadrotor failures and other obstacles. The navigation function is based on modeling healthy quadrotors as particles in an ideal fluid flow. We provide three key contributions: (i) A Containment Exclusion Mode (CEM) safety theorem and proof which guarantees safety and formally specifies a minimum safe distance between quadrotors in formation, (ii) A real-time, computationally efficient CEM navigation algorithm, (iii) Simulation and experimental algorithm validation. Simulations were first performed with a team of six virtual quadrotors to demonstrate velocity tracking via dynamic slide speed, maintaining sufficient inter-agent distances, and operating in real-time. Flight tests with a team of two custom quadrotors were performed in an indoor motion capture flight facility, successfully validating that the navigation algorithm can handle non-trivial bounded tracking errors while guaranteeing safety.
Drones Practicing Mechanics
Jan 20, 2022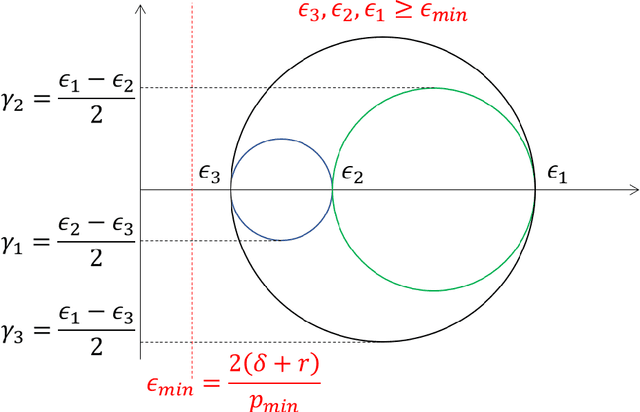
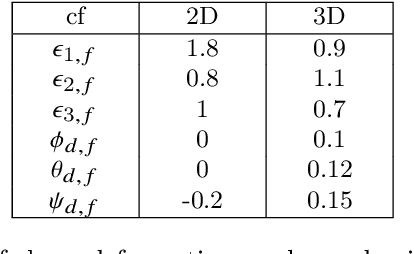
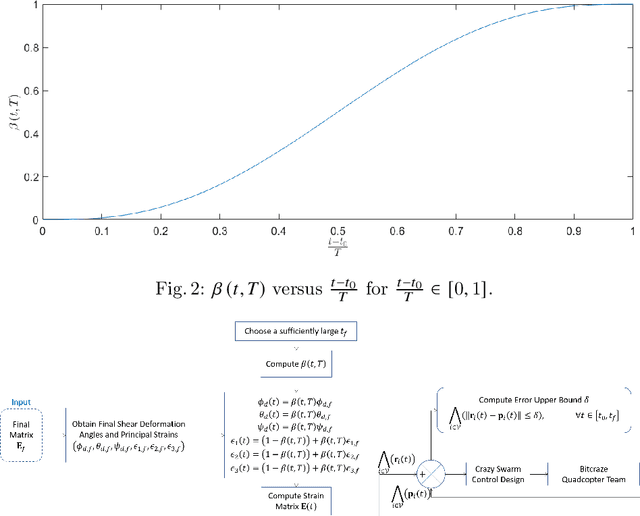
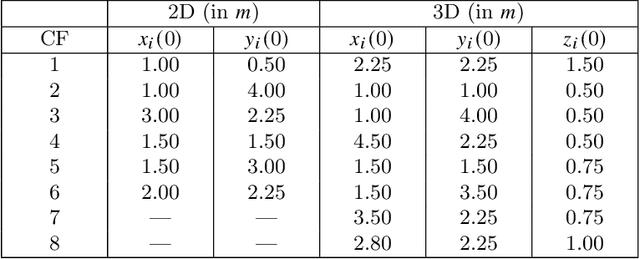
Mechanics of materials is a classic course of engineering presenting the fundamentals of strain and stress analysis to junior undergraduate students in several engineering majors. So far, material deformation and strain have been only analyzed using theoretical and numerical approaches, and they have been experimentally validated by expensive machines and tools. This paper presents a novel approach for strain and deformation analysis by using quadcopters. We propose to treat quadcopters as finite number of particles of a deformable body and apply the principles of continuum mechanics to illustrate the concept of axial and shear deformation by using quadcopter hardware in a $3$-D motion space. The outcome of this work can have significant impact on undergraduate education by filling the gap between in-class learning and hardware realization and experiments, where we introduce new roles for drones as "teachers" providing a great opportunity for practicing theoretical concepts of mechanics in a fruitful and understandable way.