 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuadrotor Formation Flying Resilient to Abrupt Vehicle Failures via a Fluid Flow Navigation Function
Mar 03, 2022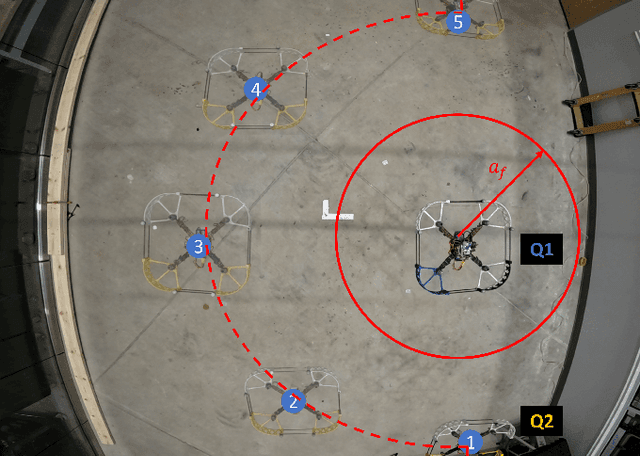
This paper develops and experimentally evaluates a navigation function for quadrotor formation flight that is resilient to abrupt quadrotor failures and other obstacles. The navigation function is based on modeling healthy quadrotors as particles in an ideal fluid flow. We provide three key contributions: (i) A Containment Exclusion Mode (CEM) safety theorem and proof which guarantees safety and formally specifies a minimum safe distance between quadrotors in formation, (ii) A real-time, computationally efficient CEM navigation algorithm, (iii) Simulation and experimental algorithm validation. Simulations were first performed with a team of six virtual quadrotors to demonstrate velocity tracking via dynamic slide speed, maintaining sufficient inter-agent distances, and operating in real-time. Flight tests with a team of two custom quadrotors were performed in an indoor motion capture flight facility, successfully validating that the navigation algorithm can handle non-trivial bounded tracking errors while guaranteeing safety.
Nailed It: Autonomous Roofing with a Nailgun-Equipped Octocopter
Sep 18, 2019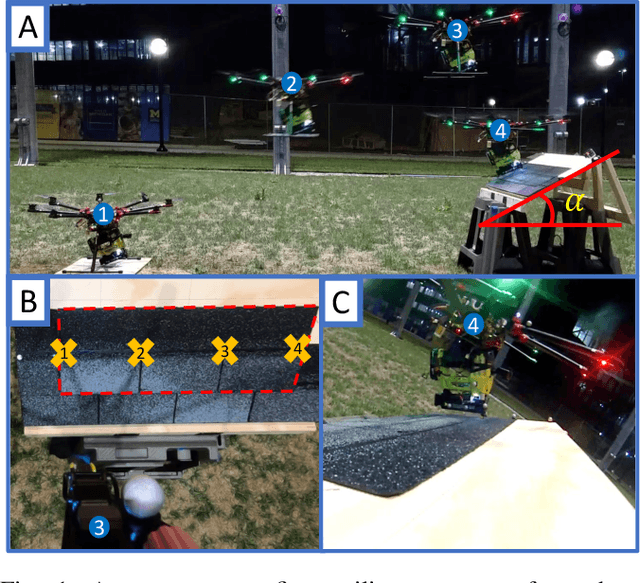


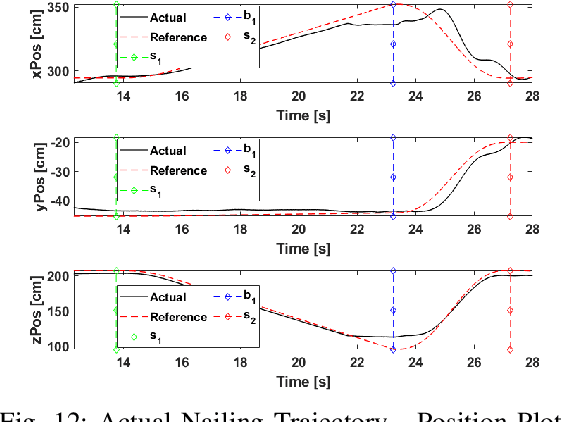
This paper presents the first demonstration of autonomous roofing with a multicopter. A DJI S1000 octocopter equipped with an off-the-shelf nailgun and an adjustableslope roof mock-up were used. The nailgun was modified to allow triggering from the vehicle and tooltip compression feedback. A mount was designed to adjust the angle to match representative roof slopes. An open-source octocopter autopilot facilitated controller adaptation for the roofing application. A state machine managed autonomous nailing sequences using smooth trajectories designed to apply prescribed contact forces for reliable nail deployment. Experimental results showed that the system is capable of nailing within a required three centimeter gap on the shingle. Extensions to achieve a complete autonomous roofing system are discussed as future work.