 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNailed It: Autonomous Roofing with a Nailgun-Equipped Octocopter
Sep 18, 2019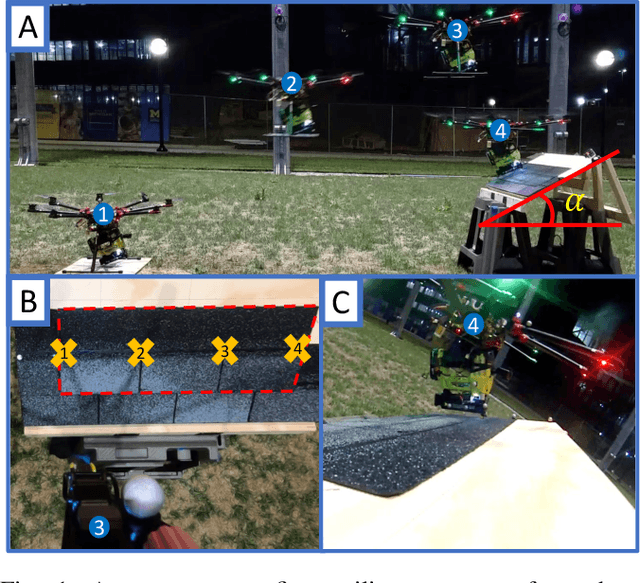


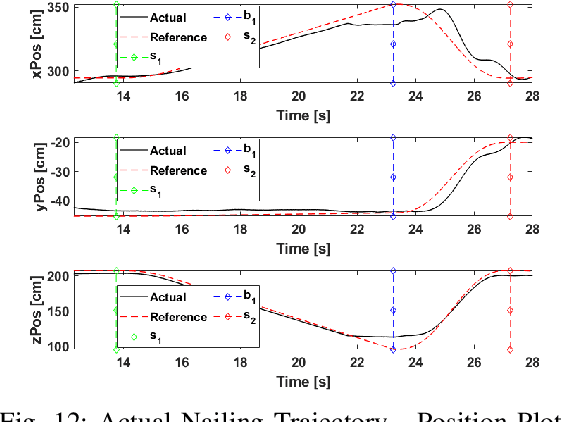
This paper presents the first demonstration of autonomous roofing with a multicopter. A DJI S1000 octocopter equipped with an off-the-shelf nailgun and an adjustableslope roof mock-up were used. The nailgun was modified to allow triggering from the vehicle and tooltip compression feedback. A mount was designed to adjust the angle to match representative roof slopes. An open-source octocopter autopilot facilitated controller adaptation for the roofing application. A state machine managed autonomous nailing sequences using smooth trajectories designed to apply prescribed contact forces for reliable nail deployment. Experimental results showed that the system is capable of nailing within a required three centimeter gap on the shingle. Extensions to achieve a complete autonomous roofing system are discussed as future work.