 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMBot: A Modular Ecosystem for Scalable Robotics Education
Dec 01, 2023



The Michigan Robotics MBot is a low-cost mobile robot platform that has been used to train over 1,400 students in autonomous navigation since 2014 at the University of Michigan and our collaborating colleges. The MBot platform was designed to meet the needs of teaching robotics at scale to match the growth of robotics as a field and an academic discipline. Transformative advancements in robot navigation over the past decades have led to a significant demand for skilled roboticists across industry and academia. This demand has sparked a need for robotics courses in higher education, spanning all levels of undergraduate and graduate experiences. Incorporating real robot platforms into such courses and curricula is effective for conveying the unique challenges of programming embodied agents in real-world environments and sparking student interest. However, teaching with real robots remains challenging due to the cost of hardware and the development effort involved in adapting existing hardware for a new course. In this paper, we describe the design and evolution of the MBot platform, and the underlying principals of scalability and flexibility which are keys to its success.
Development, Implementation, and Experimental Outdoor Evaluation of Quadcopter Controllers for Computationally Limited Embedded Systems
Jun 01, 2021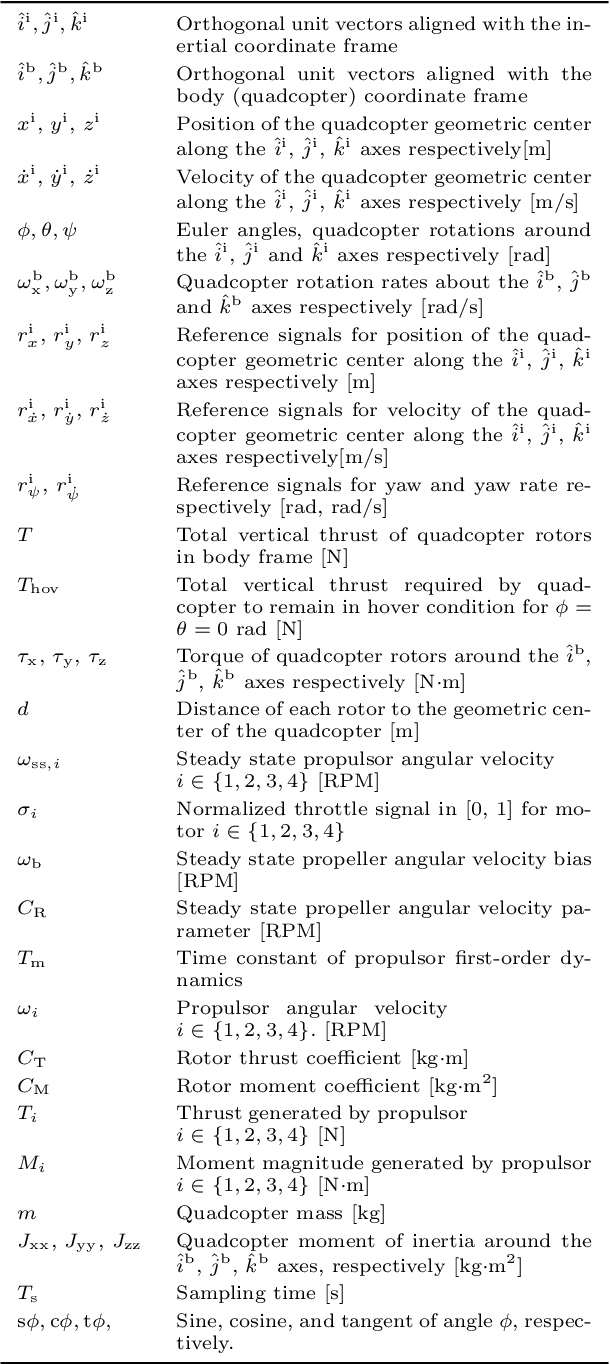
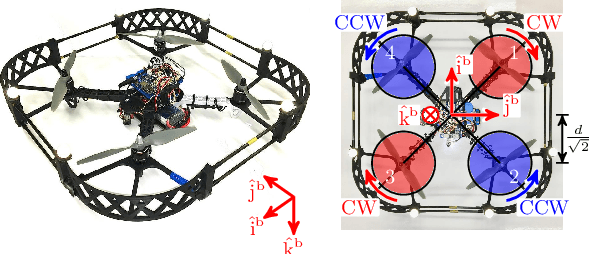
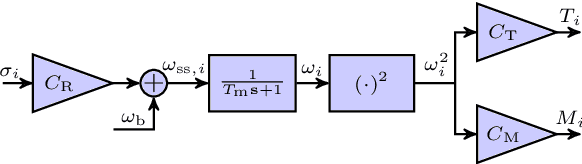
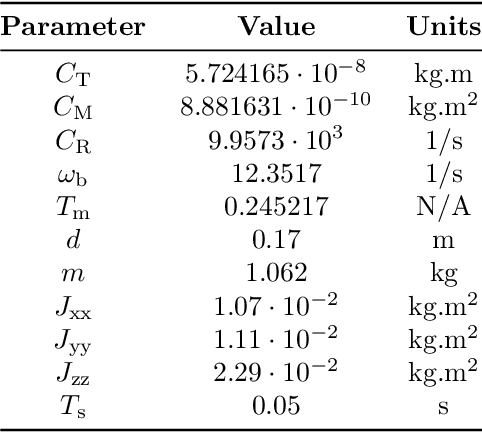
Quadcopters are increasingly used for applications ranging from hobby to industrial products and services. This paper serves as a tutorial on the design, simulation, implementation, and experimental outdoor testing of digital quadcopter flight controllers, including Explicit Model Predictive Control, Linear Quadratic Regulator, and Proportional Integral Derivative. A quadcopter was flown in an outdoor testing facility and made to track an inclined, circular path at different tangential velocities under ambient wind conditions. Controller performance was evaluated via multiple metrics, such as position tracking error, velocity tracking error, and onboard computation time. Challenges related to the use of computationally limited embedded hardware and flight in an outdoor environment are addressed with proposed solutions.