 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-guided Autonomous Dual-arm Extraction Robot for Bell Pepper Harvesting
Mar 14, 2026Agricultural robotics has emerged as a critical solution to the labor shortages and rising costs associated with manual crop harvesting. Bell pepper harvesting, in particular, is a labor-intensive task, accounting for up to 50% of total production costs. While automated solutions have shown promise in controlled greenhouse environments, harvesting in unstructured outdoor farms remains an open challenge due to environmental variability and occlusion. This paper presents VADER (Vision-guided Autonomous Dual-arm Extraction Robot), a dual-arm mobile manipulation system designed specifically for the autonomous harvesting of bell peppers in outdoor environments. The system integrates a robust perception pipeline coupled with a dual-arm planning framework that coordinates a gripping arm and a cutting arm for extraction. We validate the system through trials in various realistic conditions, demonstrating a harvest success rate exceeding 60% with a cycle time of under 100 seconds per fruit, while also featuring a teleoperation fail-safe based on the GELLO teleoperation framework to ensure robustness. To support robust perception, we contribute a hierarchically structured dataset of over 3,200 images spanning indoor and outdoor domains, pairing wide-field scene images with close-up pepper images to enable a coarse-to-fine training strategy from fruit detection to high-precision pose estimation. The code and dataset will be made publicly available upon acceptance.
SPLATART: Articulated Gaussian Splatting with Estimated Object Structure
Jun 13, 2025Representing articulated objects remains a difficult problem within the field of robotics. Objects such as pliers, clamps, or cabinets require representations that capture not only geometry and color information, but also part seperation, connectivity, and joint parametrization. Furthermore, learning these representations becomes even more difficult with each additional degree of freedom. Complex articulated objects such as robot arms may have seven or more degrees of freedom, and the depth of their kinematic tree may be notably greater than the tools, drawers, and cabinets that are the typical subjects of articulated object research. To address these concerns, we introduce SPLATART - a pipeline for learning Gaussian splat representations of articulated objects from posed images, of which a subset contains image space part segmentations. SPLATART disentangles the part separation task from the articulation estimation task, allowing for post-facto determination of joint estimation and representation of articulated objects with deeper kinematic trees than previously exhibited. In this work, we present data on the SPLATART pipeline as applied to the syntheic Paris dataset objects, and qualitative results on a real-world object under spare segmentation supervision. We additionally present on articulated serial chain manipulators to demonstrate usage on deeper kinematic tree structures.
Invisible Watermarks: Attacks and Robustness
Dec 17, 2024As Generative AI continues to become more accessible, the case for robust detection of generated images in order to combat misinformation is stronger than ever. Invisible watermarking methods act as identifiers of generated content, embedding image- and latent-space messages that are robust to many forms of perturbations. The majority of current research investigates full-image attacks against images with a single watermarking method applied. We introduce novel improvements to watermarking robustness as well as minimizing degradation on image quality during attack. Firstly, we examine the application of both image-space and latent-space watermarking methods on a single image, where we propose a custom watermark remover network which preserves one of the watermarking modalities while completely removing the other during decoding. Then, we investigate localized blurring attacks (LBA) on watermarked images based on the GradCAM heatmap acquired from the watermark decoder in order to reduce the amount of degradation to the target image. Our evaluation suggests that 1) implementing the watermark remover model to preserve one of the watermark modalities when decoding the other modality slightly improves on the baseline performance, and that 2) LBA degrades the image significantly less compared to uniform blurring of the entire image. Code is available at: https://github.com/tomputer-g/IDL_WAR
NARF24: Estimating Articulated Object Structure for Implicit Rendering
Sep 15, 2024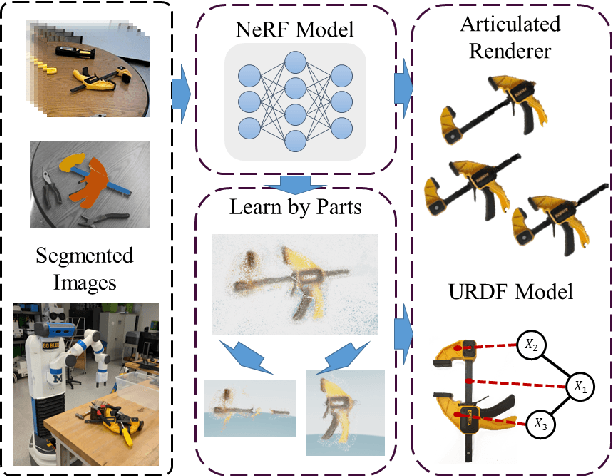

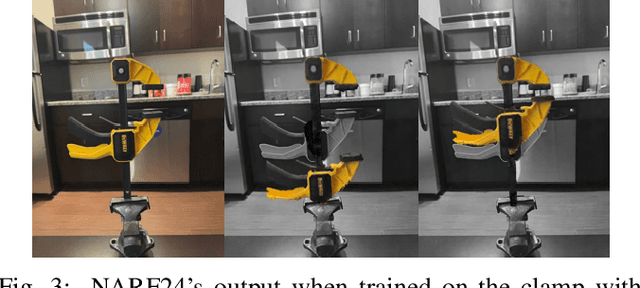

Articulated objects and their representations pose a difficult problem for robots. These objects require not only representations of geometry and texture, but also of the various connections and joint parameters that make up each articulation. We propose a method that learns a common Neural Radiance Field (NeRF) representation across a small number of collected scenes. This representation is combined with a parts-based image segmentation to produce an implicit space part localization, from which the connectivity and joint parameters of the articulated object can be estimated, thus enabling configuration-conditioned rendering.
MBot: A Modular Ecosystem for Scalable Robotics Education
Dec 01, 2023



The Michigan Robotics MBot is a low-cost mobile robot platform that has been used to train over 1,400 students in autonomous navigation since 2014 at the University of Michigan and our collaborating colleges. The MBot platform was designed to meet the needs of teaching robotics at scale to match the growth of robotics as a field and an academic discipline. Transformative advancements in robot navigation over the past decades have led to a significant demand for skilled roboticists across industry and academia. This demand has sparked a need for robotics courses in higher education, spanning all levels of undergraduate and graduate experiences. Incorporating real robot platforms into such courses and curricula is effective for conveying the unique challenges of programming embodied agents in real-world environments and sparking student interest. However, teaching with real robots remains challenging due to the cost of hardware and the development effort involved in adapting existing hardware for a new course. In this paper, we describe the design and evolution of the MBot platform, and the underlying principals of scalability and flexibility which are keys to its success.