 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan Vision Foundation Models Navigate? Zero-Shot Real-World Evaluation and Lessons Learned
Mar 26, 2026Visual Navigation Models (VNMs) promise generalizable, robot navigation by learning from large-scale visual demonstrations. Despite growing real-world deployment, existing evaluations rely almost exclusively on success rate, whether the robot reaches its goal, which conceals trajectory quality, collision behavior, and robustness to environmental change. We present a real-world evaluation of five state-of-the-art VNMs (GNM, ViNT, NoMaD, NaviBridger, and CrossFormer) across two robot platforms and five environments spanning indoor and outdoor settings. Beyond success rate, we combine path-based metrics with vision-based goal-recognition scores and assess robustness through controlled image perturbations (motion blur, sunflare). Our analysis uncovers three systematic limitations: (a) even architecturally sophisticated diffusion and transformer-based models exhibit frequent collisions, indicating limited geometric understanding; (b) models fail to discriminate between different locations that are perceptually similar, however some semantics differences are present, causing goal prediction errors in repetitive environments; and (c) performance degrades under distribution shift. We will publicly release our evaluation codebase and dataset to facilitate reproducible benchmarking of VNMs.
MBot: A Modular Ecosystem for Scalable Robotics Education
Dec 01, 2023



The Michigan Robotics MBot is a low-cost mobile robot platform that has been used to train over 1,400 students in autonomous navigation since 2014 at the University of Michigan and our collaborating colleges. The MBot platform was designed to meet the needs of teaching robotics at scale to match the growth of robotics as a field and an academic discipline. Transformative advancements in robot navigation over the past decades have led to a significant demand for skilled roboticists across industry and academia. This demand has sparked a need for robotics courses in higher education, spanning all levels of undergraduate and graduate experiences. Incorporating real robot platforms into such courses and curricula is effective for conveying the unique challenges of programming embodied agents in real-world environments and sparking student interest. However, teaching with real robots remains challenging due to the cost of hardware and the development effort involved in adapting existing hardware for a new course. In this paper, we describe the design and evolution of the MBot platform, and the underlying principals of scalability and flexibility which are keys to its success.
Stein Variational Belief Propagation for Multi-Robot Coordination
Nov 28, 2023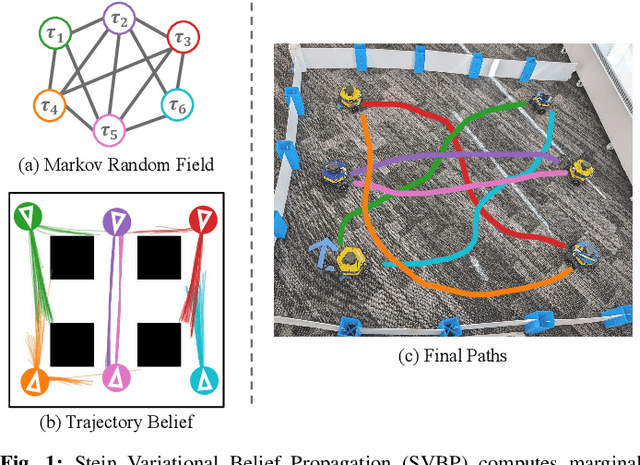
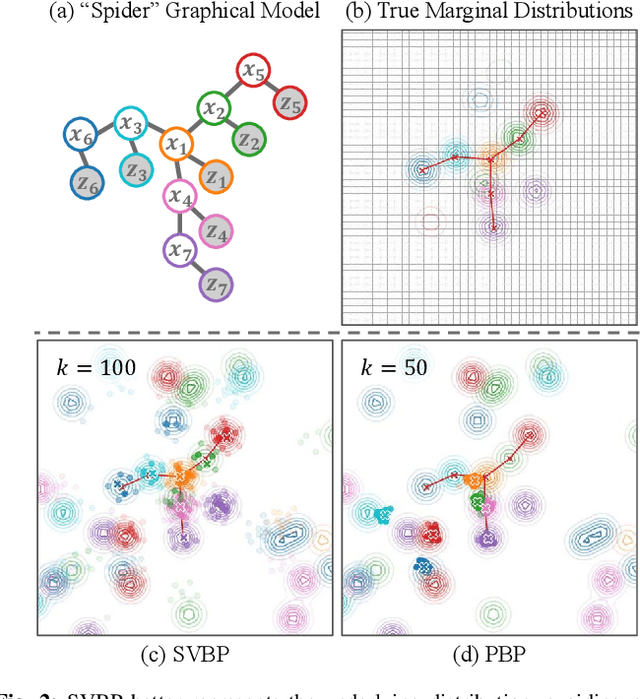
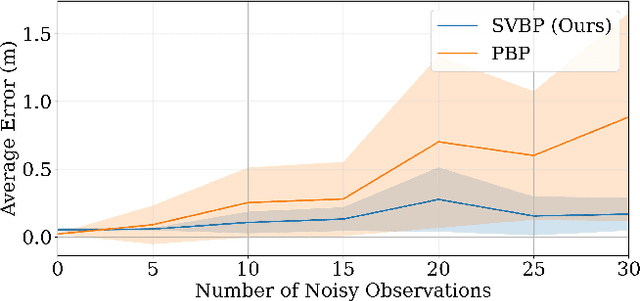
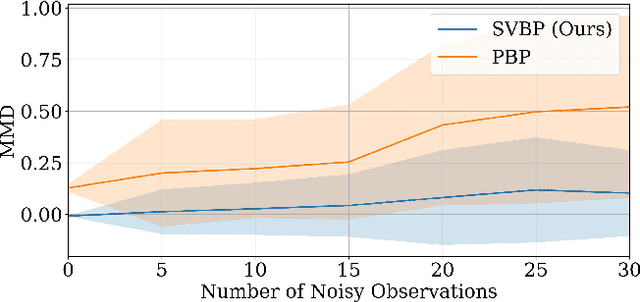
Decentralized coordination for multi-robot systems involves planning in challenging, high-dimensional spaces. The planning problem is particularly challenging in the presence of obstacles and different sources of uncertainty such as inaccurate dynamic models and sensor noise. In this paper, we introduce Stein Variational Belief Propagation (SVBP), a novel algorithm for performing inference over nonparametric marginal distributions of nodes in a graph. We apply SVBP to multi-robot coordination by modelling a robot swarm as a graphical model and performing inference for each robot. We demonstrate our algorithm on a simulated multi-robot perception task, and on a multi-robot planning task within a Model-Predictive Control (MPC) framework, on both simulated and real-world mobile robots. Our experiments show that SVBP represents multi-modal distributions better than sampling-based or Gaussian baselines, resulting in improved performance on perception and planning tasks. Furthermore, we show that SVBP's ability to represent diverse trajectories for decentralized multi-robot planning makes it less prone to deadlock scenarios than leading baselines.
Counter-Hypothetical Particle Filters for Single Object Pose Tracking
May 28, 2023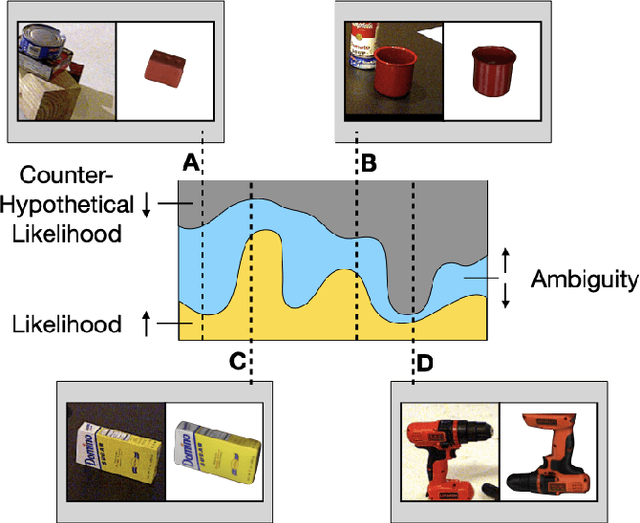
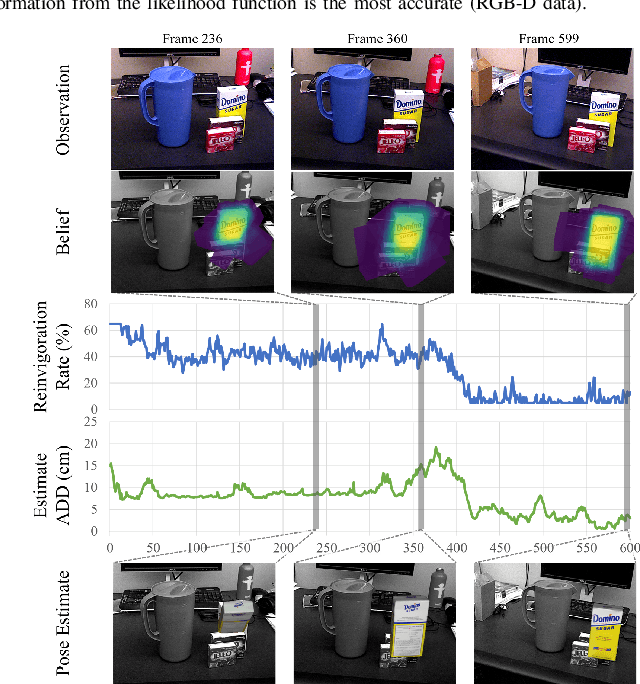
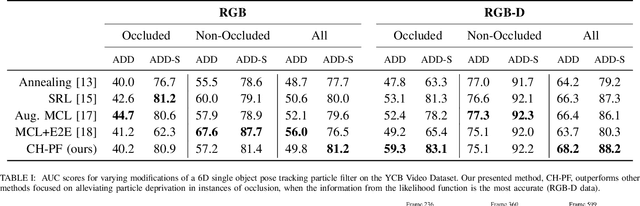
Particle filtering is a common technique for six degree of freedom (6D) pose estimation due to its ability to tractably represent belief over object pose. However, the particle filter is prone to particle deprivation due to the high-dimensional nature of 6D pose. When particle deprivation occurs, it can cause mode collapse of the underlying belief distribution during importance sampling. If the region surrounding the true state suffers from mode collapse, recovering its belief is challenging since the area is no longer represented in the probability mass formed by the particles. Previous methods mitigate this problem by randomizing and resetting particles in the belief distribution, but determining the frequency of reinvigoration has relied on hand-tuning abstract heuristics. In this paper, we estimate the necessary reinvigoration rate at each time step by introducing a Counter-Hypothetical likelihood function, which is used alongside the standard likelihood. Inspired by the notions of plausibility and implausibility from Evidential Reasoning, the addition of our Counter-Hypothetical likelihood function assigns a level of doubt to each particle. The competing cumulative values of confidence and doubt across the particle set are used to estimate the level of failure within the filter, in order to determine the portion of particles to be reinvigorated. We demonstrate the effectiveness of our method on the rigid body object 6D pose tracking task.
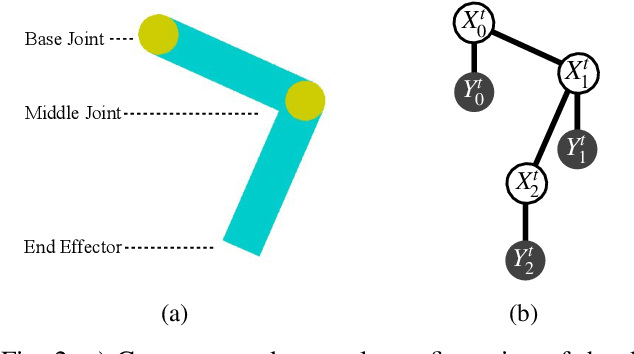
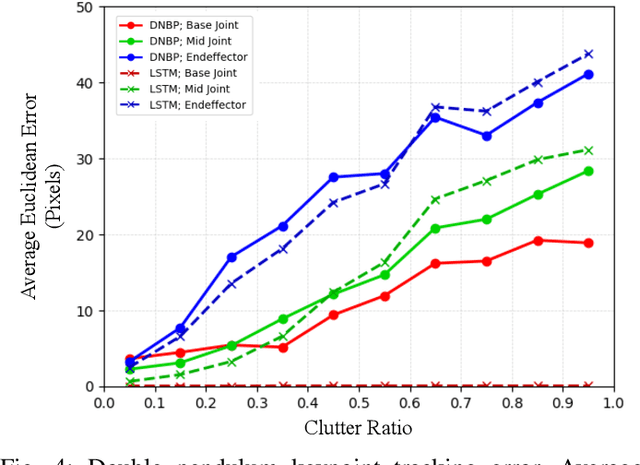
DNBP: Differentiable Nonparametric Belief Propagation
Mar 08, 2023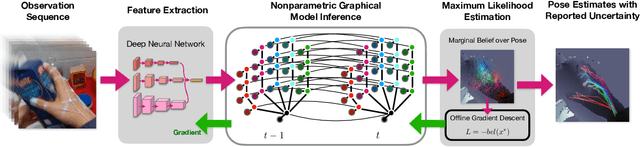
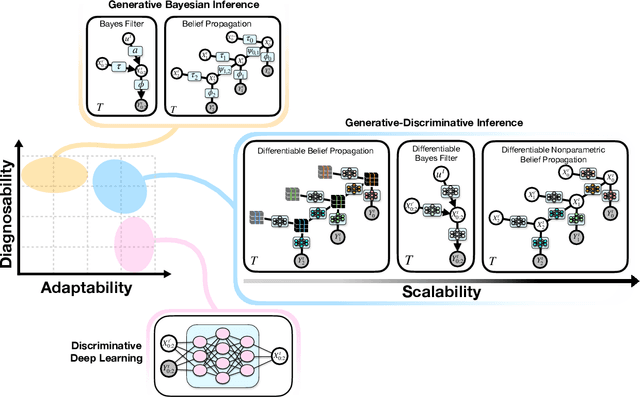
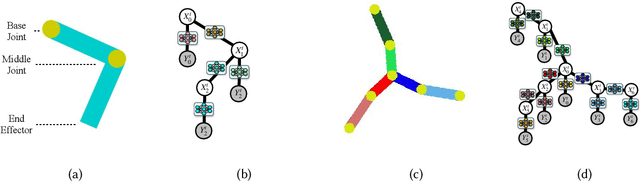
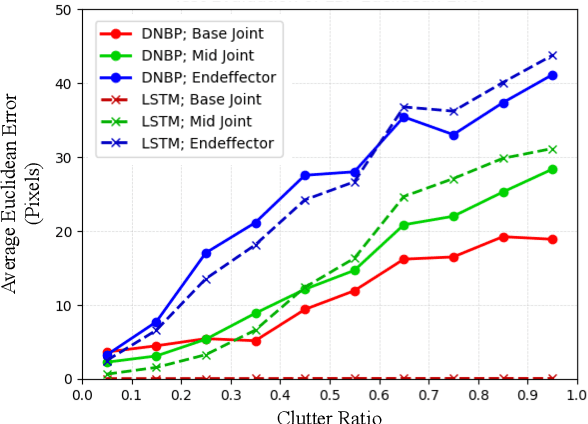
We present a differentiable approach to learn the probabilistic factors used for inference by a nonparametric belief propagation algorithm. Existing nonparametric belief propagation methods rely on domain-specific features encoded in the probabilistic factors of a graphical model. In this work, we replace each crafted factor with a differentiable neural network enabling the factors to be learned using an efficient optimization routine from labeled data. By combining differentiable neural networks with an efficient belief propagation algorithm, our method learns to maintain a set of marginal posterior samples using end-to-end training. We evaluate our differentiable nonparametric belief propagation (DNBP) method on a set of articulated pose tracking tasks and compare performance with learned baselines. Results from these experiments demonstrate the effectiveness of using learned factors for tracking and suggest the practical advantage over hand-crafted approaches. The project webpage is available at: https://progress.eecs.umich.edu/projects/dnbp/ .
NARF22: Neural Articulated Radiance Fields for Configuration-Aware Rendering
Oct 03, 2022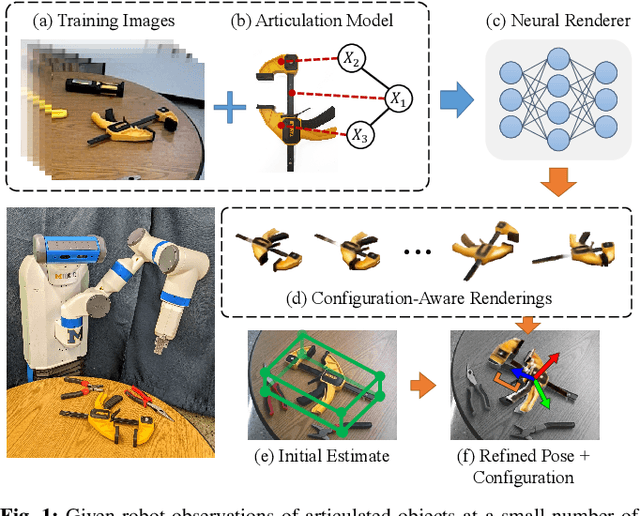
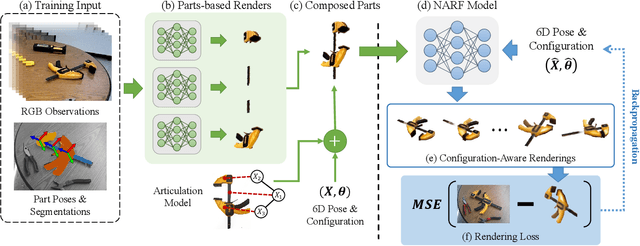
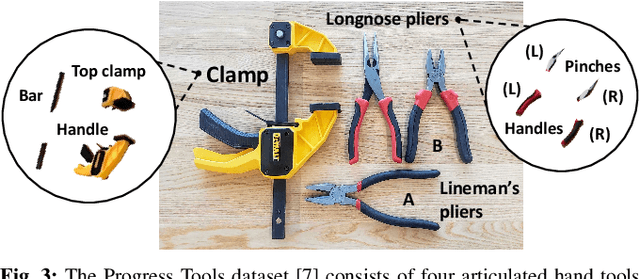

Articulated objects pose a unique challenge for robotic perception and manipulation. Their increased number of degrees-of-freedom makes tasks such as localization computationally difficult, while also making the process of real-world dataset collection unscalable. With the aim of addressing these scalability issues, we propose Neural Articulated Radiance Fields (NARF22), a pipeline which uses a fully-differentiable, configuration-parameterized Neural Radiance Field (NeRF) as a means of providing high quality renderings of articulated objects. NARF22 requires no explicit knowledge of the object structure at inference time. We propose a two-stage parts-based training mechanism which allows the object rendering models to generalize well across the configuration space even if the underlying training data has as few as one configuration represented. We demonstrate the efficacy of NARF22 by training configurable renderers on a real-world articulated tool dataset collected via a Fetch mobile manipulation robot. We show the applicability of the model to gradient-based inference methods through a configuration estimation and 6 degree-of-freedom pose refinement task. The project webpage is available at: https://progress.eecs.umich.edu/projects/narf/.
Differentiable Nonparametric Belief Propagation
Jan 15, 2021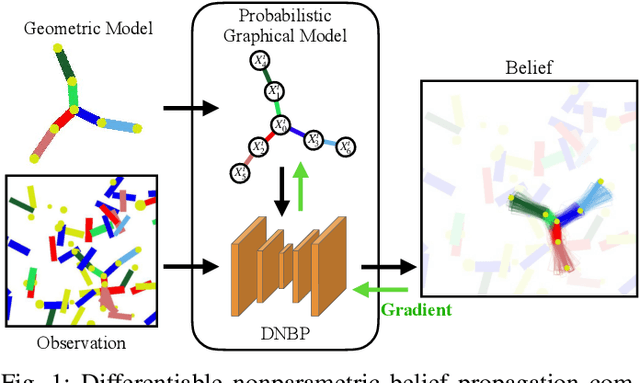

We present a differentiable approach to learn the probabilistic factors used for inference by a nonparametric belief propagation algorithm. Existing nonparametric belief propagation methods rely on domain-specific features encoded in the probabilistic factors of a graphical model. In this work, we replace each crafted factor with a differentiable neural network enabling the factors to be learned using an efficient optimization routine from labeled data. By combining differentiable neural networks with an efficient belief propagation algorithm, our method learns to maintain a set of marginal posterior samples using end-to-end training. We evaluate our differentiable nonparametric belief propagation (DNBP) method on a set of articulated pose tracking tasks and compare performance with a recurrent neural network. Results from this comparison demonstrate the effectiveness of using learned factors for tracking and suggest the practical advantage over hand-crafted approaches. The project webpage is available at: progress.eecs.umich.edu/projects/dnbp.
Manipulation-Oriented Object Perception in Clutter through Affordance Coordinate Frames
Oct 16, 2020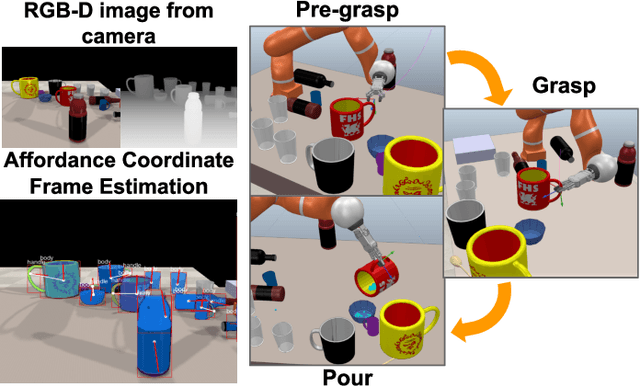
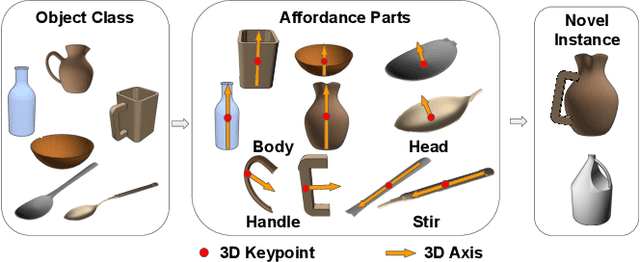
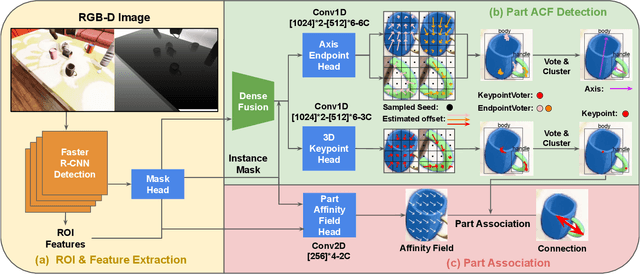
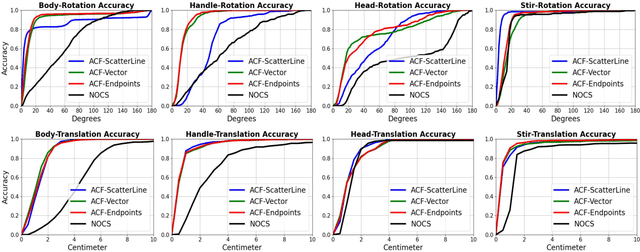
In order to enable robust operation in unstructured environments, robots should be able to generalize manipulation actions to novel object instances. For example, to pour and serve a drink, a robot should be able to recognize novel containers which afford the task. Most importantly, robots should be able to manipulate these novel containers to fulfill the task. To achieve this, we aim to provide robust and generalized perception of object affordances and their associated manipulation poses for reliable manipulation. In this work, we combine the notions of affordance and category-level pose, and introduce the Affordance Coordinate Frame (ACF). With ACF, we represent each object class in terms of individual affordance parts and the compatibility between them, where each part is associated with a part category-level pose for robot manipulation. In our experiments, we demonstrate that ACF outperforms state-of-the-art methods for object detection, as well as category-level pose estimation for object parts. We further demonstrate the applicability of ACF to robot manipulation tasks through experiments in a simulated environment.
Parts-Based Articulated Object Localization in Clutter Using Belief Propagation
Aug 06, 2020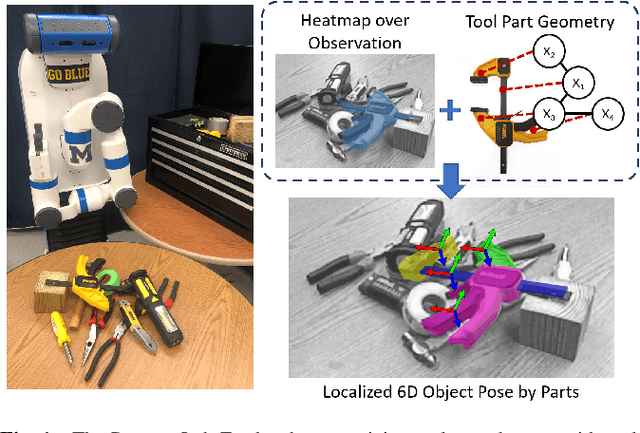
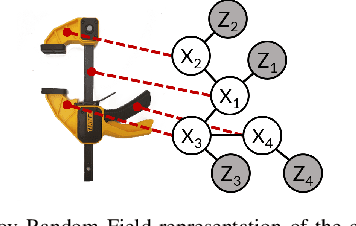
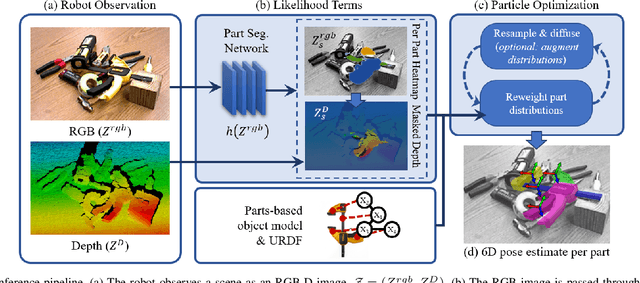

Robots working in human environments must be able to perceive and act on challenging objects with articulations, such as a pile of tools. Articulated objects increase the dimensionality of the pose estimation problem, and partial observations under clutter create additional challenges. To address this problem, we present a generative-discriminative parts-based recognition and localization method for articulated objects in clutter. We formulate the problem of articulated object pose estimation as a Markov Random Field (MRF). Hidden nodes in this MRF express the pose of the object parts, and edges express the articulation constraints between parts. Localization is performed within the MRF using an efficient belief propagation method. The method is informed by both part segmentation heatmaps over the observation, generated by a neural network, and the articulation constraints between object parts. Our generative-discriminative approach allows the proposed method to function in cluttered environments by inferring the pose of occluded parts using hypotheses from the visible parts. We demonstrate the efficacy of our methods in a tabletop environment for recognizing and localizing hand tools in uncluttered and cluttered configurations.
A Sketch-Based System for Human-Guided Constrained Object Manipulation
Nov 17, 2019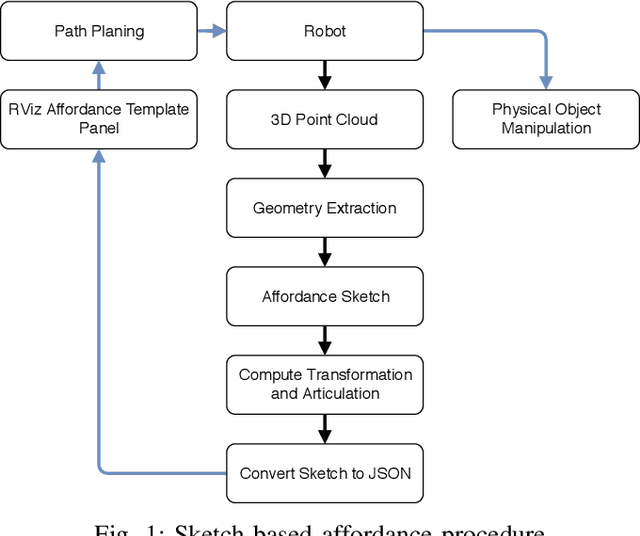
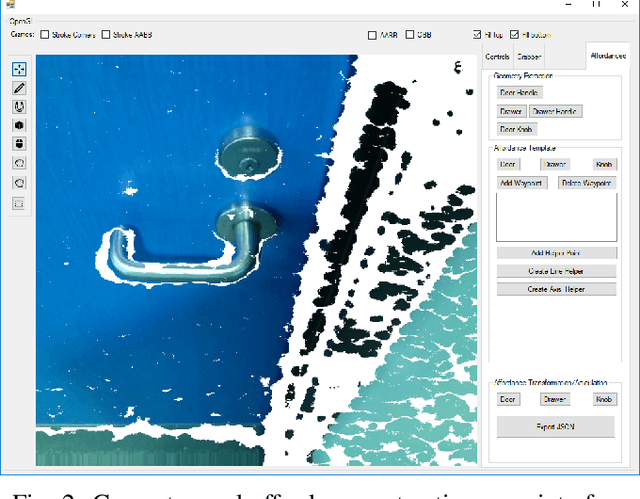
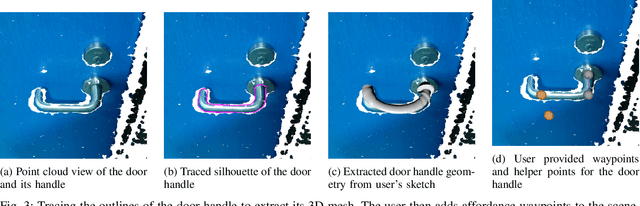
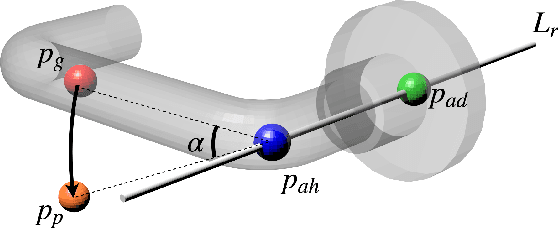
In this paper, we present an easy to use sketch-based interface to extract geometries and generate affordance files from 3D point clouds for robot-object interaction tasks. Using our system, even novice users can perform robot task planning by employing such sketch tools. Our focus in this paper is employing human-in-the-loop approach to assist in the generation of more accurate affordance templates and guidance of robot through the task execution process. Since we do not employ any unsupervised learning to generate affordance templates, our system performs much faster and is more versatile for template generation. Our system is based on the extraction of geometries for generalized cylindrical and cuboid shapes, after extracting the geometries, affordances are generated for objects by applying simple sketches. We evaluated our technique by asking users to define affordances by employing sketches on the 3D scenes of a door handle and a drawer handle and used the resulting extracted affordance template files to perform the tasks of turning a door handle and opening a drawer by the robot.