 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigation of risk-aware MDP and POMDP contingency management autonomy for UAS
Apr 03, 2023Unmanned aircraft systems (UAS) are being increasingly adopted for various applications. The risk UAS poses to people and property must be kept to acceptable levels. This paper proposes risk-aware contingency management autonomy to prevent an accident in the event of component malfunction, specifically propulsion unit failure and/or battery degradation. The proposed autonomy is modeled as a Markov Decision Process (MDP) whose solution is a contingency management policy that appropriately executes emergency landing, flight termination or continuation of planned flight actions. Motivated by the potential for errors in fault/failure indicators, partial observability of the MDP state space is investigated. The performance of optimal policies is analyzed over varying observability conditions in a high-fidelity simulator. Results indicate that both partially observable MDP (POMDP) and maximum a posteriori MDP policies performed similarly over different state observability criteria, given the nearly deterministic state transition model.
Development, Implementation, and Experimental Outdoor Evaluation of Quadcopter Controllers for Computationally Limited Embedded Systems
Jun 01, 2021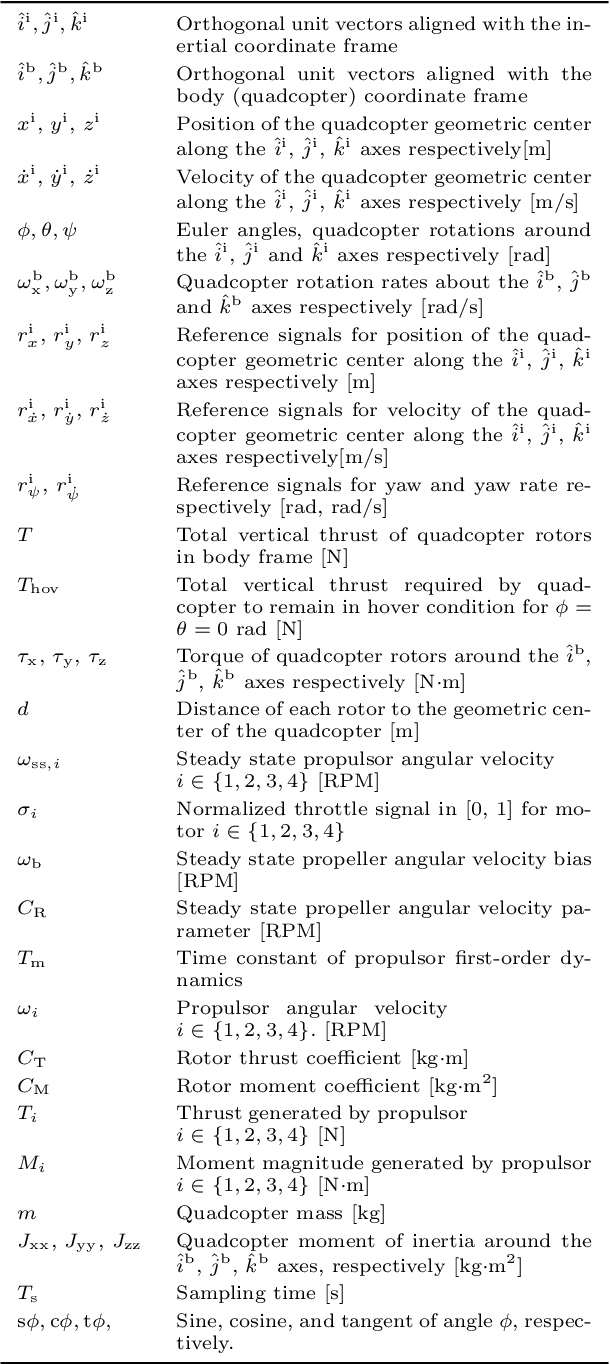
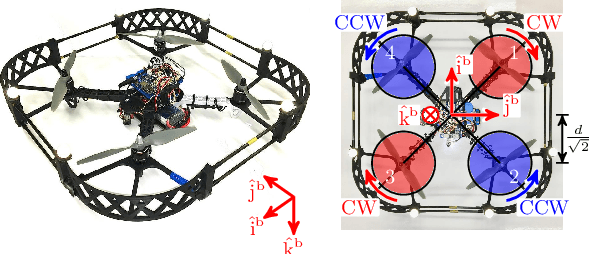
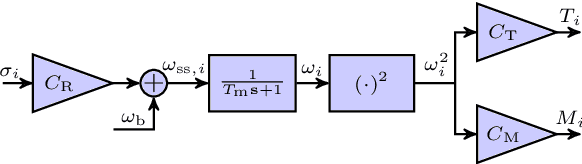
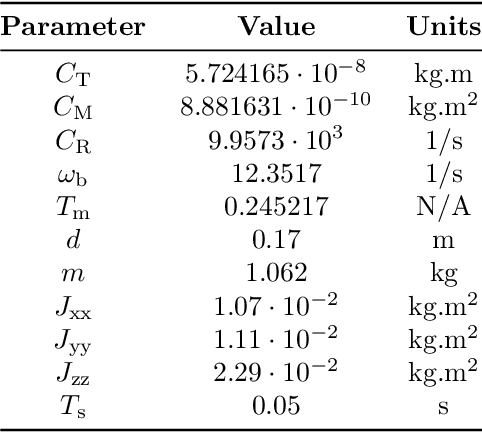
Quadcopters are increasingly used for applications ranging from hobby to industrial products and services. This paper serves as a tutorial on the design, simulation, implementation, and experimental outdoor testing of digital quadcopter flight controllers, including Explicit Model Predictive Control, Linear Quadratic Regulator, and Proportional Integral Derivative. A quadcopter was flown in an outdoor testing facility and made to track an inclined, circular path at different tangential velocities under ambient wind conditions. Controller performance was evaluated via multiple metrics, such as position tracking error, velocity tracking error, and onboard computation time. Challenges related to the use of computationally limited embedded hardware and flight in an outdoor environment are addressed with proposed solutions.
Prognostics-Informed Battery Reconfiguration in a Multi-Battery Small UAS Energy System
Mar 02, 2021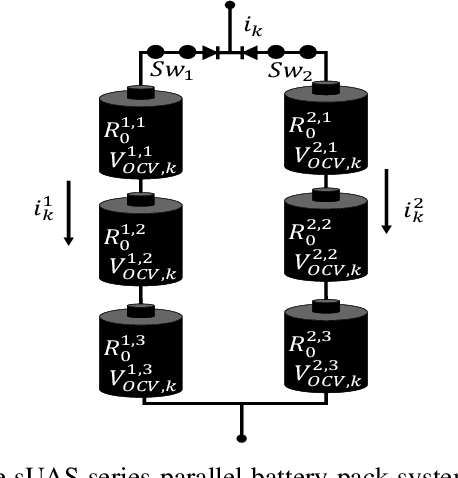
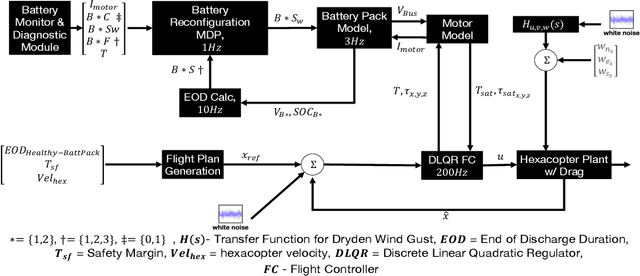
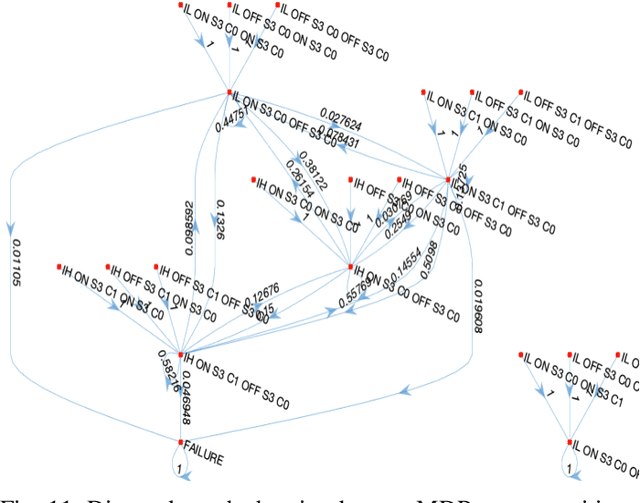

Batteries have been identified as one most likely small UAS (sUAS) components to fail in flight. sUAS safety will therefore be improved with redundant or backup batteries. This paper presents a prognostics-informed Markov Decision Process (MDP) model for managing multi-battery reconfiguration for sUAS missions. Typical lithium polymer (Lipo) battery properties are experimentally characterized and used in Monte Carlo simulations to establish battery dynamics in sUAS flights of varying duration. Case studies illustrate the trade off between multi-battery system increased complexity/weight and resilience to non-ideal battery performance.