 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow to Model Brushless Electric Motors for the Design of Lightweight Robotic Systems
Sep 29, 2023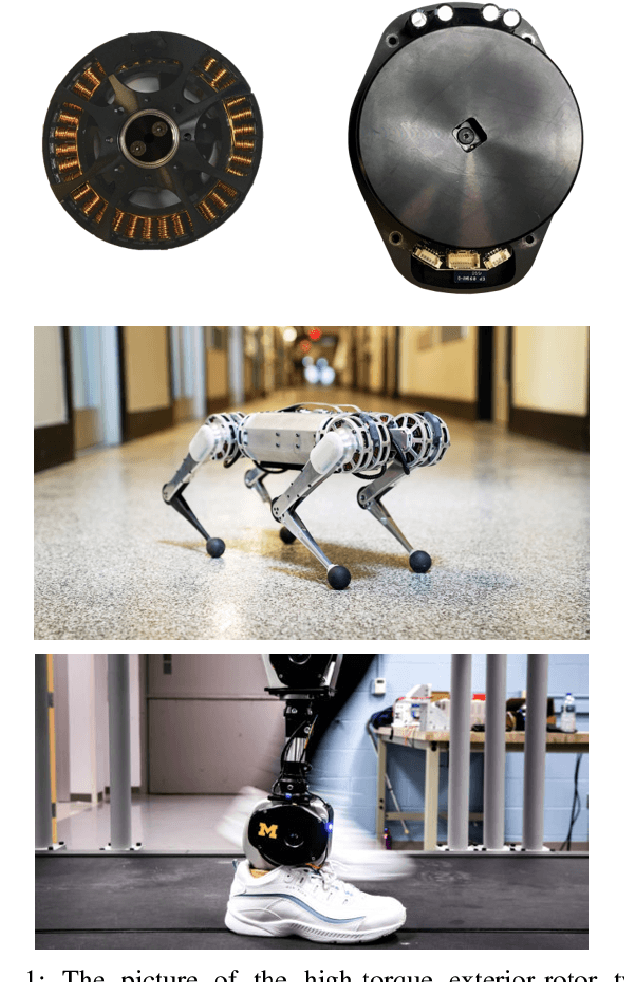
A key step in the development of lightweight, high performance robotic systems is the modeling and selection of permanent magnet brushless direct current (BLDC) electric motors. Typical modeling analyses are completed a priori, and provide insight for properly sizing a motor for an application, specifying the required operating voltage and current, as well as assessing the thermal response and other design attributes (e.g.transmission ratio). However, to perform these modeling analyses, proper information about the motor's characteristics are needed, which are often obtained from manufacturer datasheets. Through our own experience and communications with manufacturers, we have noticed a lack of clarity and standardization in modeling BLDC motors, compounded by vague or inconsistent terminology used in motor datasheets. The purpose of this tutorial is to concisely describe the governing equations for BLDC motor analyses used in the design process, as well as highlight potential errors that can arise from incorrect usage. We present a power-invariant conversion from phase and line-to-line reference frames to a familiar q-axis DC motor representation, which provides a ``brushed'' analogue of a three phase BLDC motor that is convenient for analysis and design. We highlight potential errors including incorrect calculations of winding resistive heat loss, improper estimation of motor torque via the motor's torque constant, and incorrect estimation of the required bus voltage or resulting angular velocity limitations. A unified and condensed set of governing equations is available for designers in the Appendix. The intent of this work is to provide a consolidated mathematical foundation for modeling BLDC motors that addresses existing confusion and fosters high performance designs of future robotic systems.
The Michigan Robotics Undergraduate Curriculum: Defining the Discipline of Robotics for Equity and Excellence
Aug 14, 2023The Robotics Major at the University of Michigan was successfully launched in the 2022-23 academic year as an innovative step forward to better serve students, our communities, and our society. Building on our guiding principle of "Robotics with Respect" and our larger Robotics Pathways model, the Michigan Robotics Major was designed to define robotics as a true academic discipline with both equity and excellence as our highest priorities. Understanding that talent is equally distributed but opportunity is not, the Michigan Robotics Major has embraced an adaptable curriculum that is accessible through a diversity of student pathways and enables successful and sustained career-long participation in robotics, AI, and automation professions. The results after our planning efforts (2019-22) and first academic year (2022-23) have been highly encouraging: more than 100 students declared Robotics as their major, completion of the Robotics major by our first two graduates, soaring enrollments in our Robotics classes, thriving partnerships with Historically Black Colleges and Universities. This document provides our original curricular proposal for the Robotics Undergraduate Program at the University of Michigan, submitted to the Michigan Association of State Universities in April 2022 and approved in June 2022. The dissemination of our program design is in the spirit of continued growth for higher education towards realizing equity and excellence. The most recent version of this document is also available on Google Docs through this link: https://ocj.me/robotics_major