 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCPMamba: Selective State Space Models for MIMO Channel Prediction in High-Mobility Environments
Dec 18, 2025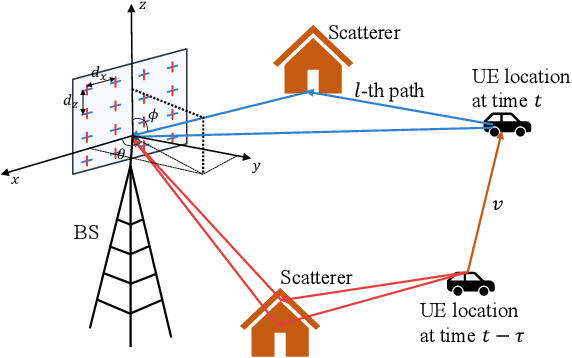
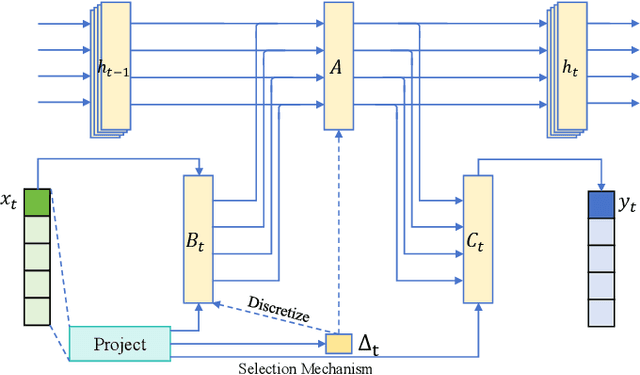
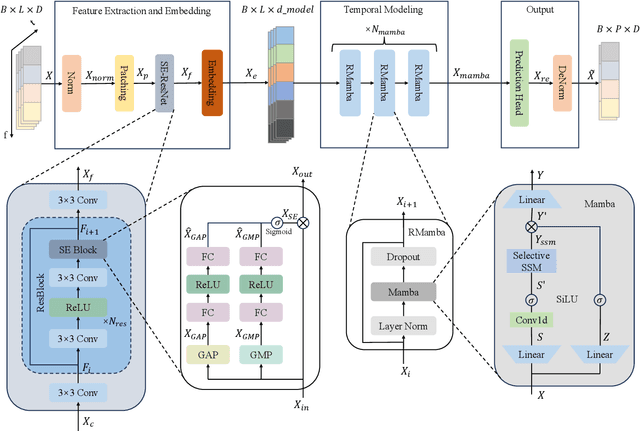
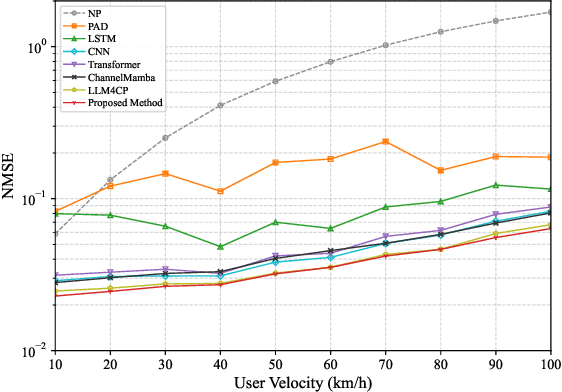
Channel prediction is a key technology for improving the performance of various functions such as precoding, adaptive modulation, and resource allocation in MIMO-OFDM systems. Especially in high-mobility scenarios with fast time-varying channels, it is crucial for resisting channel aging and ensuring communication quality. However, existing methods suffer from high complexity and the inability to accurately model the temporal variations of channels. To address this issue, this paper proposes CPMamba -- an efficient channel prediction framework based on the selective state space model. The proposed CPMamba architecture extracts features from historical channel state information (CSI) using a specifically designed feature extraction and embedding network and employs stacked residual Mamba modules for temporal modeling. By leveraging an input-dependent selective mechanism to dynamically adjust state transitions, it can effectively capture the long-range dependencies between the CSIs while maintaining a linear computational complexity. Simulation results under the 3GPP standard channel model demonstrate that CPMamba achieves state-of-the-art prediction accuracy across all scenarios, along with superior generalization and robustness. Compared to existing baseline models, CPMamba reduces the number of parameters by approximately 50 percent while achieving comparable or better performance, thereby significantly lowering the barrier for practical deployment.
QoE Optimization for Semantic Self-Correcting Video Transmission in Multi-UAV Networks
Jul 09, 2025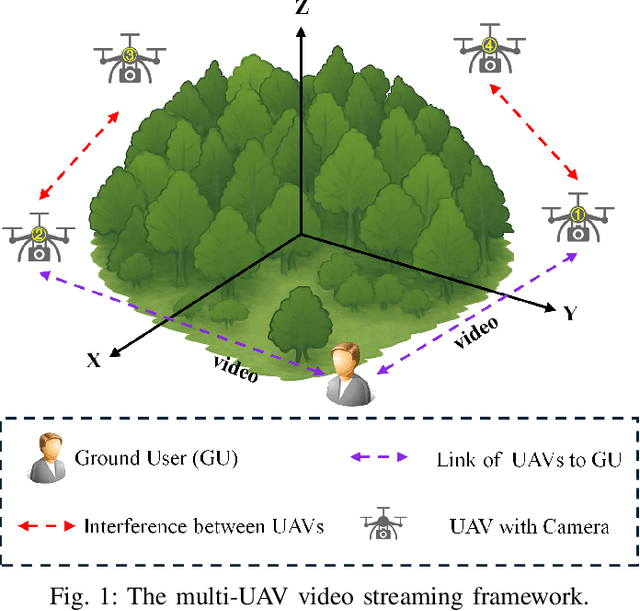
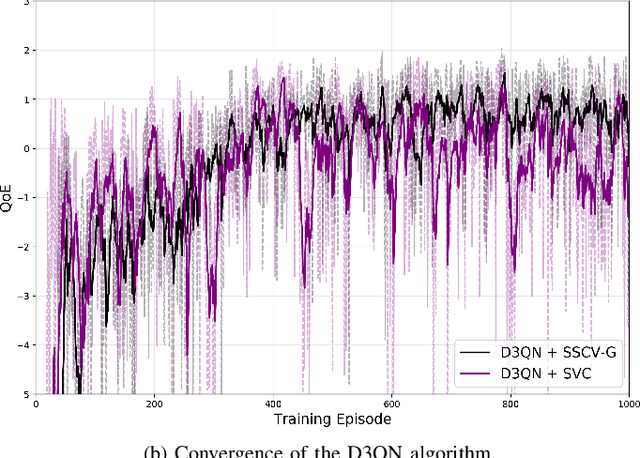
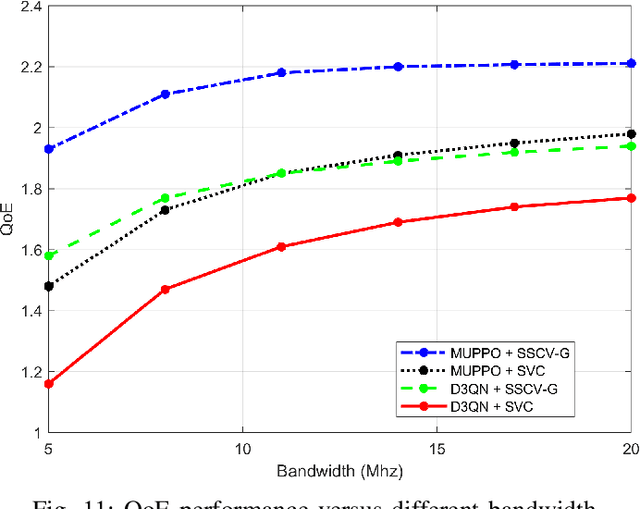
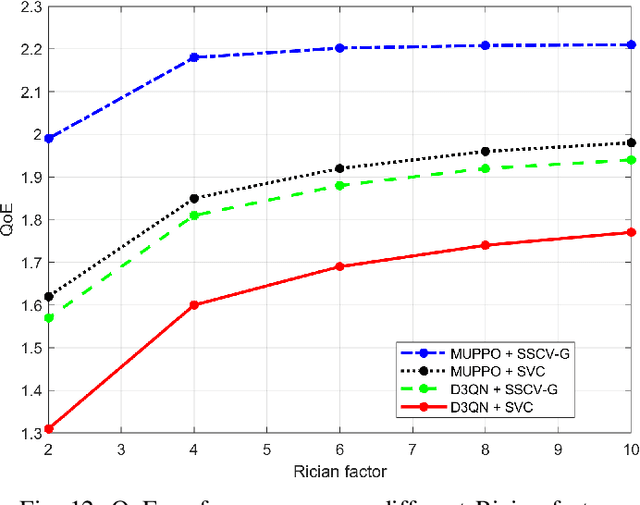
Real-time unmanned aerial vehicle (UAV) video streaming is essential for time-sensitive applications, including remote surveillance, emergency response, and environmental monitoring. However, it faces challenges such as limited bandwidth, latency fluctuations, and high packet loss. To address these issues, we propose a novel semantic self-correcting video transmission framework with ultra-fine bitrate granularity (SSCV-G). In SSCV-G, video frames are encoded into a compact semantic codebook space, and the transmitter adaptively sends a subset of semantic indices based on bandwidth availability, enabling fine-grained bitrate control for improved bandwidth efficiency. At the receiver, a spatio-temporal vision transformer (ST-ViT) performs multi-frame joint decoding to reconstruct dropped semantic indices by modeling intra- and inter-frame dependencies. To further improve performance under dynamic network conditions, we integrate a multi-user proximal policy optimization (MUPPO) reinforcement learning scheme that jointly optimizes communication resource allocation and semantic bitrate selection to maximize user Quality of Experience (QoE). Extensive experiments demonstrate that the proposed SSCV-G significantly outperforms state-of-the-art video codecs in coding efficiency, bandwidth adaptability, and packet loss robustness. Moreover, the proposed MUPPO-based QoE optimization consistently surpasses existing benchmarks.
The Communication and Computation Trade-off in Wireless Semantic Communications
Apr 14, 2025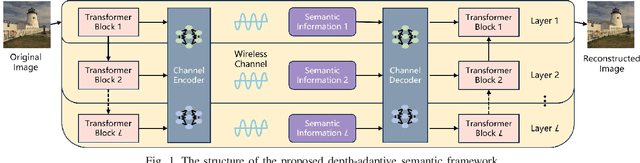
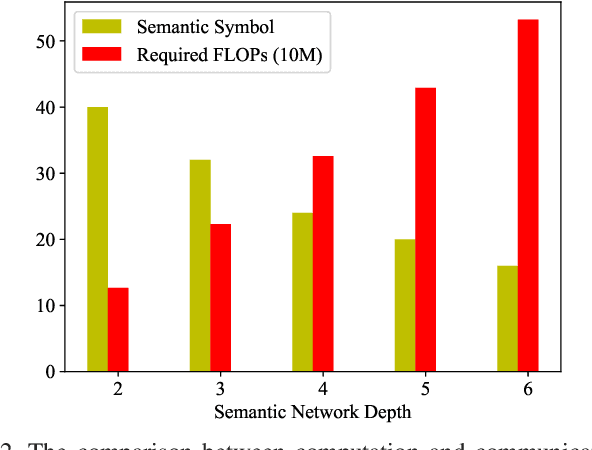
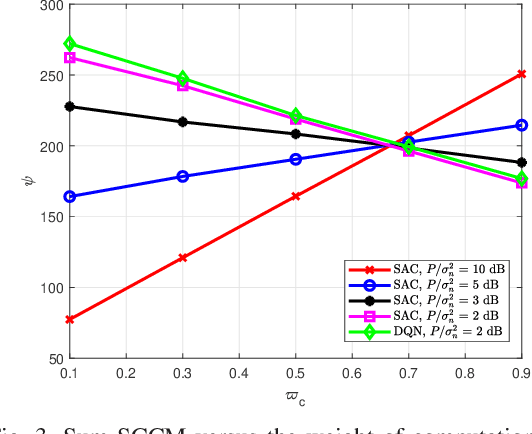
Semantic communications have emerged as a crucial research direction for future wireless communication networks. However, as wireless systems become increasingly complex, the demands for computation and communication resources in semantic communications continue to grow rapidly. This paper investigates the trade-off between computation and communication in wireless semantic communications, taking into consideration transmission task delay and performance constraints within the semantic communication framework. We propose a novel tradeoff metric to analyze the balance between computation and communication in semantic transmissions and employ the deep reinforcement learning (DRL) algorithm to minimize this metric, thereby reducing the cost associated with balancing computation and communication. Through simulations, we analyze the tradeoff between computation and communication and demonstrate the effectiveness of optimizing this trade-off metric.
Low-Rate Semantic Communication with Codebook-based Conditional Generative Models
Apr 07, 2025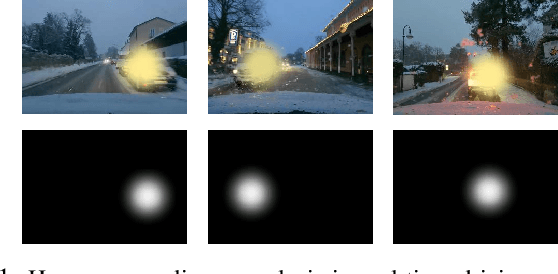
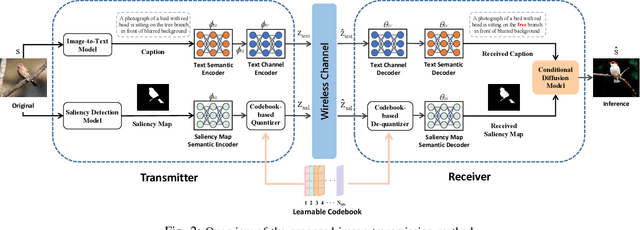
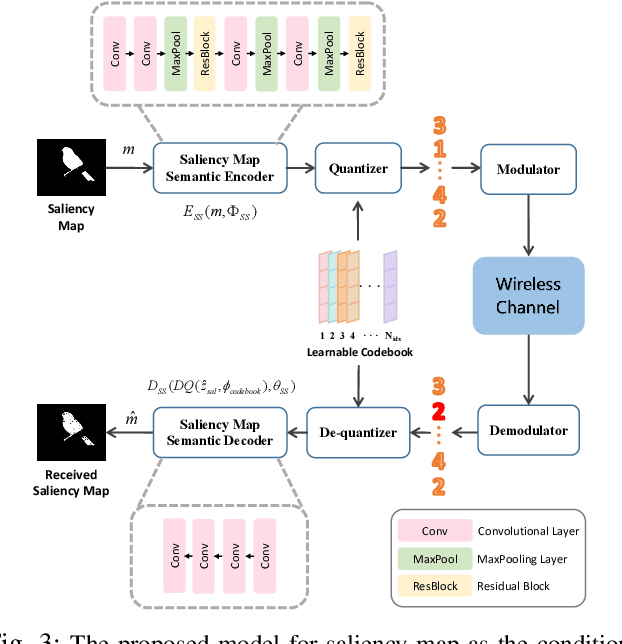
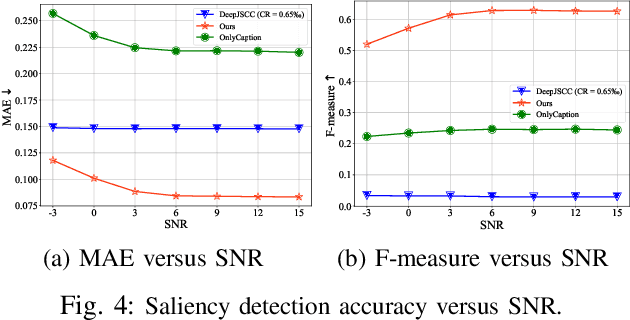
Generative semantic communication models are reshaping semantic communication frameworks by moving beyond pixel-wise optimization to align with human perception. However, many existing approaches prioritize image-level perceptual quality, often neglecting alignment with downstream tasks, which can lead to suboptimal semantic representation. This paper introduces an Ultra-Low Bitrate Semantic Communication (ULBSC) system that employs a conditional generative model and a learnable condition codebook.By integrating saliency conditions and image-level semantic information, the proposed method enables high-perceptual-quality and controllable task-oriented image transmission. Recognizing shared patterns among objects, we propose a codebook-assisted condition transmission method, integrated with joint source-channel coding (JSCC)-based text transmission to establish ULBSC. The codebook serves as a knowledge base, reducing communication costs to achieve ultra-low bitrate while enhancing robustness against noise and inaccuracies in saliency detection. Simulation results indicate that, under ultra-low bitrate conditions with an average compression ratio of 0.57Z%o, the proposed system delivers superior visual quality compared to traditional JSCC techniques and achieves higher saliency similarity between the generated and source images compared to state-of-the-art generative semantic communication methods.
A Robust and Efficient Visual-Inertial Initialization with Probabilistic Normal Epipolar Constraint
Oct 25, 2024



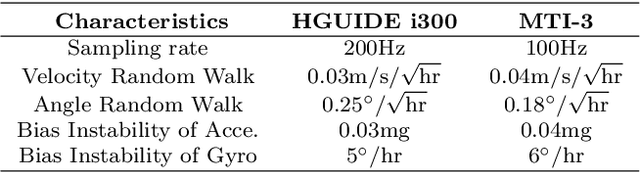
Accurate and robust initialization is essential for Visual-Inertial Odometry (VIO), as poor initialization can severely degrade pose accuracy. During initialization, it is crucial to estimate parameters such as accelerometer bias, gyroscope bias, initial velocity, and gravity, etc. The IMU sensor requires precise estimation of gyroscope bias because gyroscope bias affects rotation, velocity and position. Most existing VIO initialization methods adopt Structure from Motion (SfM) to solve for gyroscope bias. However, SfM is not stable and efficient enough in fast motion or degenerate scenes. To overcome these limitations, we extended the rotation-translation-decoupling framework by adding new uncertainty parameters and optimization modules. First, we adopt a gyroscope bias optimizer that incorporates probabilistic normal epipolar constraints. Second, we fuse IMU and visual measurements to solve for velocity, gravity, and scale efficiently. Finally, we design an additional refinement module that effectively diminishes gravity and scale errors. Extensive initialization tests on the EuRoC dataset show that our method reduces the gyroscope bias and rotation estimation error by an average of 16% and 4% respectively. It also significantly reduces the gravity error, with an average reduction of 29%.
Mini-Slot-Assisted Short Packet URLLC:Differential or Coherent Detection?
Aug 26, 2024
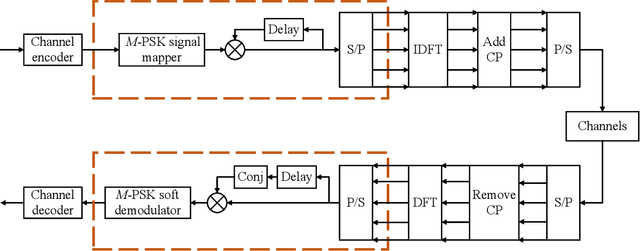
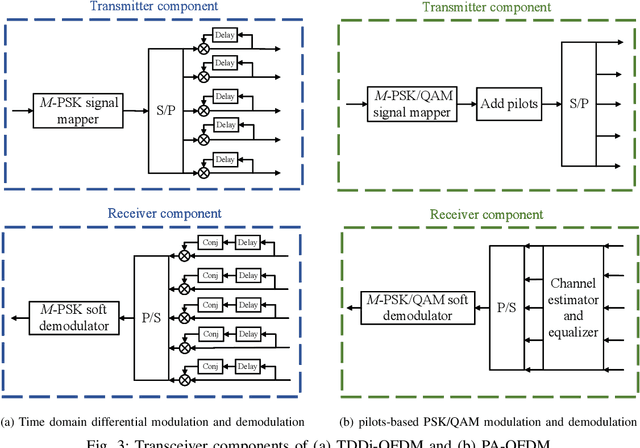
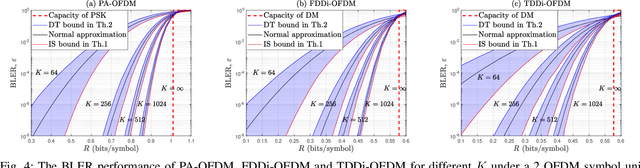
One of the primary challenges in short packet ultra-reliable and low-latency communications (URLLC) is to achieve reliable channel estimation and data detection while minimizing the impact on latency performance. Given the small packet size in mini-slot-assisted URLLC, relying solely on pilot-based coherent detection is almost impossible to meet the seemingly contradictory requirements of high channel estimation accuracy, high reliability, low training overhead, and low latency. In this paper, we explore differential modulation both in the frequency domain and in the time domain, and propose adopting an adaptive approach that integrates both differential and coherent detection to achieve mini-slot-assisted short packet URLLC, striking a balance among training overhead, system performance, and computational complexity. Specifically, differential (especially in the frequency domain) and coherent detection schemes can be dynamically activated based on application scenarios, channel statistics, information payloads, mini-slot deployment options, and service requirements. Furthermore, we derive the block error rate (BLER) for pilot-based, frequency domain, and time domain differential OFDM using non-asymptotic information-theoretic bounds. Simulation results validate the feasibility and effectiveness of adaptive differential and coherent detection.
Tightly-Coupled VLP/INS Integrated Navigation by Inclination Estimation and Blockage Handling
Apr 28, 2024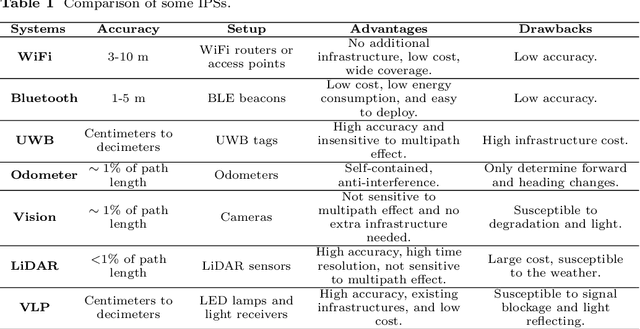
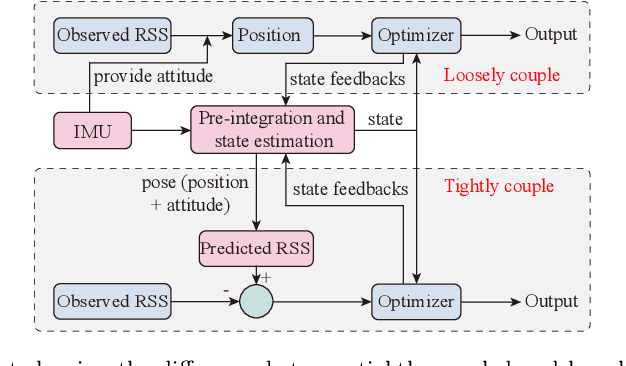

Visible Light Positioning (VLP) has emerged as a promising technology capable of delivering indoor localization with high accuracy. In VLP systems that use Photodiodes (PDs) as light receivers, the Received Signal Strength (RSS) is affected by the incidence angle of light, making the inclination of PDs a critical parameter in the positioning model. Currently, most studies assume the inclination to be constant, limiting the applications and positioning accuracy. Additionally, light blockages may severely interfere with the RSS measurements but the literature has not explored blockage detection in real-world experiments. To address these problems, we propose a tightly coupled VLP/INS (Inertial Navigation System) integrated navigation system that uses graph optimization to account for varying PD inclinations and VLP blockages. We also discussed the possibility of simultaneously estimating the robot's pose and the locations of some unknown LEDs. Simulations and two groups of real-world experiments demonstrate the efficiency of our approach, achieving an average positioning accuracy of 10 cm during movement and inclination accuracy within 1 degree despite inclination changes and blockages.
Proactive Content Caching Scheme in Urban Vehicular Networks
May 12, 2023Stream media content caching is a key enabling technology to promote the value chain of future urban vehicular networks. Nevertheless, the high mobility of vehicles, intermittency of information transmissions, high dynamics of user requests, limited caching capacities and extreme complexity of business scenarios pose an enormous challenge to content caching and distribution in vehicular networks. To tackle this problem, this paper aims to design a novel edge-computing-enabled hierarchical cooperative caching framework. Firstly, we profoundly analyze the spatio-temporal correlation between the historical vehicle trajectory of user requests and construct the system model to predict the vehicle trajectory and content popularity, which lays a foundation for mobility-aware content caching and dispatching. Meanwhile, we probe into privacy protection strategies to realize privacy-preserved prediction model. Furthermore, based on trajectory and popular content prediction results, content caching strategy is studied, and adaptive and dynamic resource management schemes are proposed for hierarchical cooperative caching networks. Finally, simulations are provided to verify the superiority of our proposed scheme and algorithms. It shows that the proposed algorithms effectively improve the performance of the considered system in terms of hit ratio and average delay, and narrow the gap to the optimal caching scheme comparing with the traditional schemes.
WiserVR: Semantic Communication Enabled Wireless Virtual Reality Delivery
Nov 02, 2022

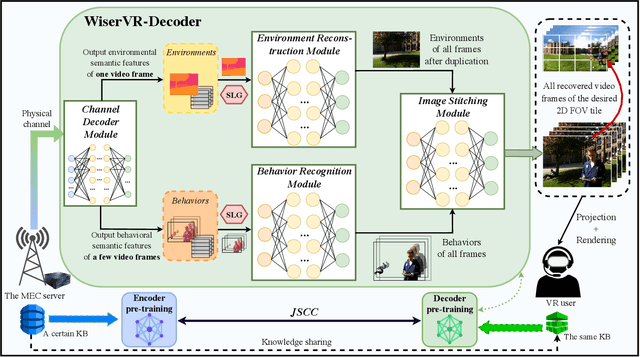

Virtual reality (VR) over wireless is expected to be one of the killer applications in next-generation communication networks. Nevertheless, the huge data volume along with stringent requirements on latency and reliability under limited bandwidth resources makes untethered wireless VR delivery increasingly challenging. Such bottlenecks, therefore, motivate this work to seek the potential of using semantic communication, a new paradigm that promises to significantly ease the resource pressure, for efficient VR delivery. To this end, we propose a novel framework, namely WIreless SEmantic deliveRy for VR (WiserVR), for delivering consecutive 360{\deg} video frames to VR users. Specifically, deep learning-based multiple modules are well-devised for the transceiver in WiserVR to realize high-performance feature extraction and semantic recovery. Among them, we dedicatedly develop a concept of semantic location graph and leverage the joint-semantic-channel-coding method with knowledge sharing to not only substantially reduce communication latency, but also to guarantee adequate transmission reliability and resilience under various channel states. Moreover, implementation of WiserVR is presented, followed by corresponding initial simulations for performance evaluation compared with benchmarks. Finally, we discuss several open issues and offer feasible solutions to unlock the full potential of WiserVR.
Semi-Synchronous Personalized Federated Learning over Mobile Edge Networks
Sep 27, 2022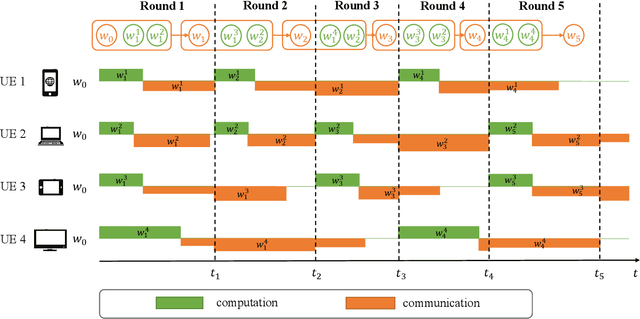
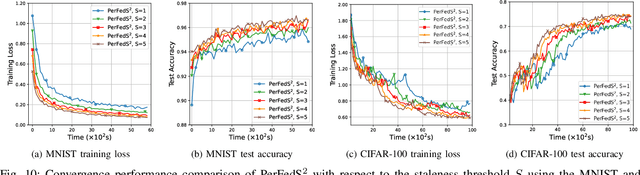
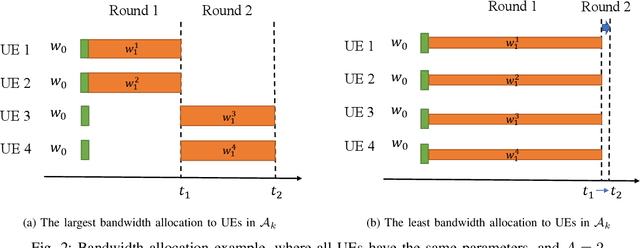
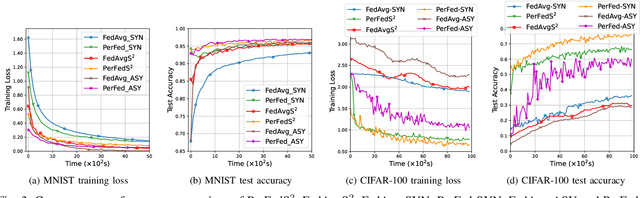
Personalized Federated Learning (PFL) is a new Federated Learning (FL) approach to address the heterogeneity issue of the datasets generated by distributed user equipments (UEs). However, most existing PFL implementations rely on synchronous training to ensure good convergence performances, which may lead to a serious straggler problem, where the training time is heavily prolonged by the slowest UE. To address this issue, we propose a semi-synchronous PFL algorithm, termed as Semi-Synchronous Personalized FederatedAveraging (PerFedS$^2$), over mobile edge networks. By jointly optimizing the wireless bandwidth allocation and UE scheduling policy, it not only mitigates the straggler problem but also provides convergent training loss guarantees. We derive an upper bound of the convergence rate of PerFedS2 in terms of the number of participants per global round and the number of rounds. On this basis, the bandwidth allocation problem can be solved using analytical solutions and the UE scheduling policy can be obtained by a greedy algorithm. Experimental results verify the effectiveness of PerFedS2 in saving training time as well as guaranteeing the convergence of training loss, in contrast to synchronous and asynchronous PFL algorithms.