 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTightly-Coupled VLP/INS Integrated Navigation by Inclination Estimation and Blockage Handling
Paper and Code
Apr 28, 2024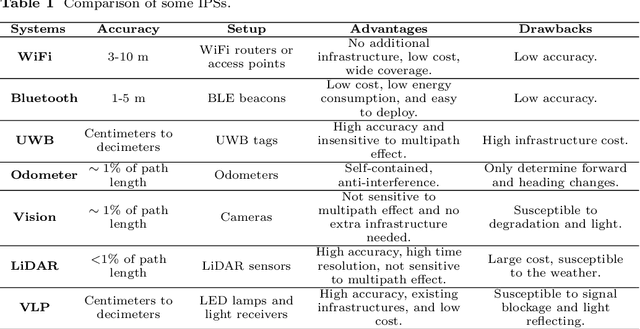
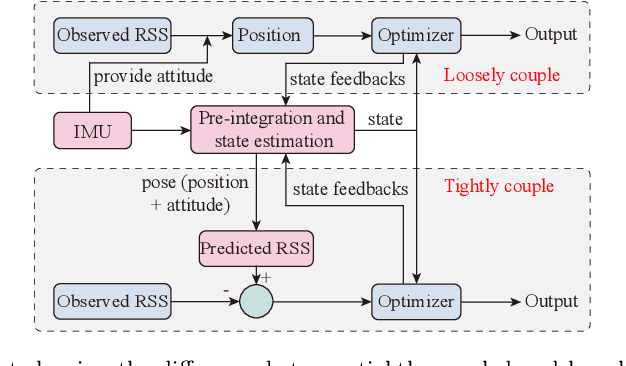

Visible Light Positioning (VLP) has emerged as a promising technology capable of delivering indoor localization with high accuracy. In VLP systems that use Photodiodes (PDs) as light receivers, the Received Signal Strength (RSS) is affected by the incidence angle of light, making the inclination of PDs a critical parameter in the positioning model. Currently, most studies assume the inclination to be constant, limiting the applications and positioning accuracy. Additionally, light blockages may severely interfere with the RSS measurements but the literature has not explored blockage detection in real-world experiments. To address these problems, we propose a tightly coupled VLP/INS (Inertial Navigation System) integrated navigation system that uses graph optimization to account for varying PD inclinations and VLP blockages. We also discussed the possibility of simultaneously estimating the robot's pose and the locations of some unknown LEDs. Simulations and two groups of real-world experiments demonstrate the efficiency of our approach, achieving an average positioning accuracy of 10 cm during movement and inclination accuracy within 1 degree despite inclination changes and blockages.