 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvancing Automated Algorithm Design via Evolutionary Stagewise Design with LLMs
Mar 09, 2026With the rapid advancement of human science and technology, problems in industrial scenarios are becoming increasingly challenging, bringing significant challenges to traditional algorithm design. Automated algorithm design with LLMs emerges as a promising solution, but the currently adopted black-box modeling deprives LLMs of any awareness of the intrinsic mechanism of the target problem, leading to hallucinated designs. In this paper, we introduce Evolutionary Stagewise Algorithm Design (EvoStage), a novel evolutionary paradigm that bridges the gap between the rigorous demands of industrial-scale algorithm design and the LLM-based algorithm design methods. Drawing inspiration from CoT, EvoStage decomposes the algorithm design process into sequential, manageable stages and integrates real-time intermediate feedback to iteratively refine algorithm design directions. To further reduce the algorithm design space and avoid falling into local optima, we introduce a multi-agent system and a "global-local perspective" mechanism. We apply EvoStage to the design of two types of common optimizers: designing parameter configuration schedules of the Adam optimizer for chip placement, and designing acquisition functions of Bayesian optimization for black-box optimization. Experimental results across open-source benchmarks demonstrate that EvoStage outperforms human-expert designs and existing LLM-based methods within only a couple of evolution steps, even achieving the historically state-of-the-art half-perimeter wire-length results on every tested chip case. Furthermore, when deployed on a commercial-grade 3D chip placement tool, EvoStage significantly surpasses the original performance metrics, achieving record-breaking efficiency. We hope EvoStage can significantly advance automated algorithm design in the real world, helping elevate human productivity.
Re$^{\text{2}}$MaP: Macro Placement by Recursively Prototyping and Packing Tree-based Relocating
Nov 11, 2025This work introduces the Re$^{\text{2}}$MaP method, which generates expert-quality macro placements through recursively prototyping and packing tree-based relocating. We first perform multi-level macro grouping and PPA-aware cell clustering to produce a unified connection matrix that captures both wirelength and dataflow among macros and clusters. Next, we use DREAMPlace to build a mixed-size placement prototype and obtain reference positions for each macro and cluster. Based on this prototype, we introduce ABPlace, an angle-based analytical method that optimizes macro positions on an ellipse to distribute macros uniformly near chip periphery, while optimizing wirelength and dataflow. A packing tree-based relocating procedure is then designed to jointly adjust the locations of macro groups and the macros within each group, by optimizing an expertise-inspired cost function that captures various design constraints through evolutionary search. Re$^{\text{2}}$MaP repeats the above process: Only a subset of macro groups are positioned in each iteration, and the remaining macros are deferred to the next iteration to improve the prototype's accuracy. Using a well-established backend flow with sufficient timing optimizations, Re$^{\text{2}}$MaP achieves up to 22.22% (average 10.26%) improvement in worst negative slack (WNS) and up to 97.91% (average 33.97%) improvement in total negative slack (TNS) compared to the state-of-the-art academic placer Hier-RTLMP. It also ranks higher on WNS, TNS, power, design rule check (DRC) violations, and runtime than the conference version ReMaP, across seven tested cases. Our code is available at https://github.com/lamda-bbo/Re2MaP.
Open3DBench: Open-Source Benchmark for 3D-IC Backend Implementation and PPA Evaluation
Mar 17, 2025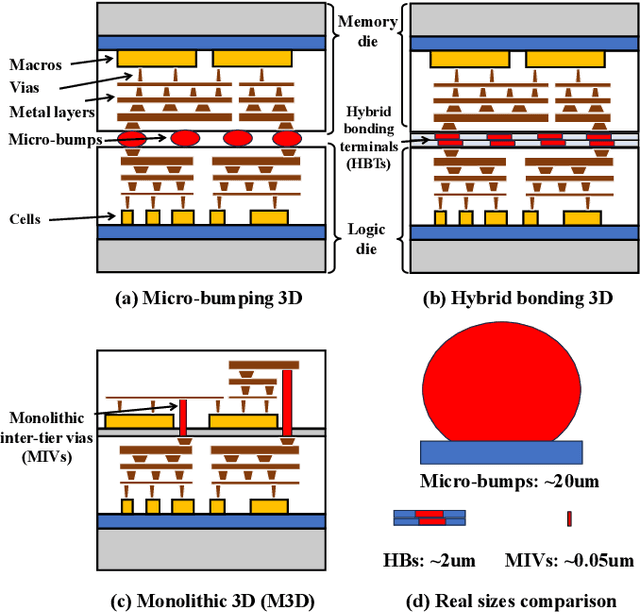
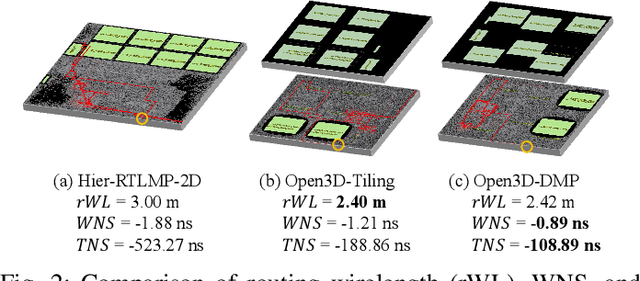
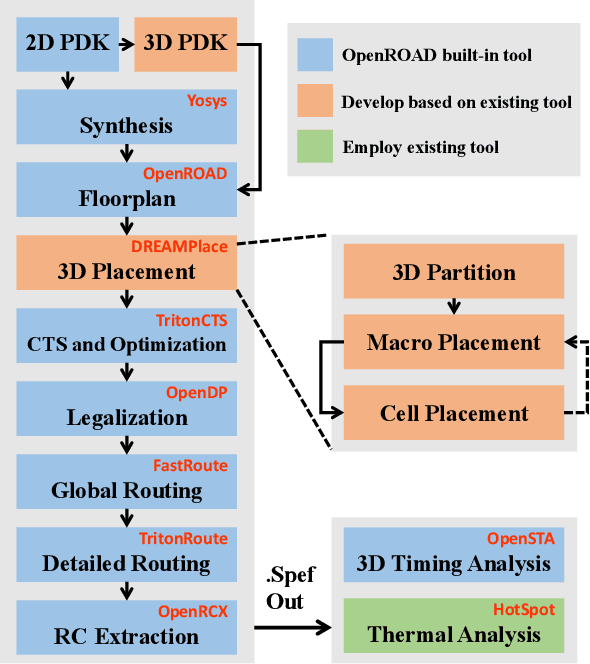

This work introduces Open3DBench, an open-source 3D-IC backend implementation benchmark built upon the OpenROAD-flow-scripts framework, enabling comprehensive evaluation of power, performance, area, and thermal metrics. Our proposed flow supports modular integration of 3D partitioning, placement, 3D routing, RC extraction, and thermal simulation, aligning with advanced 3D flows that rely on commercial tools and in-house scripts. We present two foundational 3D placement algorithms: Open3D-Tiling, which emphasizes regular macro placement, and Open3D-DMP, which enhances wirelength optimization through cross-die co-placement with analytical placer DREAMPlace. Experimental results show significant improvements in area (51.19%), wirelength (24.06%), timing (30.84%), and power (5.72%) compared to 2D flows. The results also highlight that better wirelength does not necessarily lead to PPA gain, emphasizing the need of developing PPA-driven methods. Open3DBench offers a standardized, reproducible platform for evaluating 3D EDA methods, effectively bridging the gap between open-source tools and commercial solutions in 3D-IC design.
FedPalm: A General Federated Learning Framework for Closed- and Open-Set Palmprint Verification
Mar 05, 2025



Current deep learning (DL)-based palmprint verification models rely on centralized training with large datasets, which raises significant privacy concerns due to biometric data's sensitive and immutable nature. Federated learning~(FL), a privacy-preserving distributed learning paradigm, offers a compelling alternative by enabling collaborative model training without the need for data sharing. However, FL-based palmprint verification faces critical challenges, including data heterogeneity from diverse identities and the absence of standardized evaluation benchmarks. This paper addresses these gaps by establishing a comprehensive benchmark for FL-based palmprint verification, which explicitly defines and evaluates two practical scenarios: closed-set and open-set verification. We propose FedPalm, a unified FL framework that balances local adaptability with global generalization. Each client trains a personalized textural expert tailored to local data and collaboratively contributes to a shared global textural expert for extracting generalized features. To further enhance verification performance, we introduce a Textural Expert Interaction Module that dynamically routes textural features among experts to generate refined side textural features. Learnable parameters are employed to model relationships between original and side features, fostering cross-texture-expert interaction and improving feature discrimination. Extensive experiments validate the effectiveness of FedPalm, demonstrating robust performance across both scenarios and providing a promising foundation for advancing FL-based palmprint verification research.
Pareto Set Learning for Multi-Objective Reinforcement Learning
Jan 14, 2025Multi-objective decision-making problems have emerged in numerous real-world scenarios, such as video games, navigation and robotics. Considering the clear advantages of Reinforcement Learning (RL) in optimizing decision-making processes, researchers have delved into the development of Multi-Objective RL (MORL) methods for solving multi-objective decision problems. However, previous methods either cannot obtain the entire Pareto front, or employ only a single policy network for all the preferences over multiple objectives, which may not produce personalized solutions for each preference. To address these limitations, we propose a novel decomposition-based framework for MORL, Pareto Set Learning for MORL (PSL-MORL), that harnesses the generation capability of hypernetwork to produce the parameters of the policy network for each decomposition weight, generating relatively distinct policies for various scalarized subproblems with high efficiency. PSL-MORL is a general framework, which is compatible for any RL algorithm. The theoretical result guarantees the superiority of the model capacity of PSL-MORL and the optimality of the obtained policy network. Through extensive experiments on diverse benchmarks, we demonstrate the effectiveness of PSL-MORL in achieving dense coverage of the Pareto front, significantly outperforming state-of-the-art MORL methods in the hypervolume and sparsity indicators.
Deep Learning in Palmprint Recognition-A Comprehensive Survey
Jan 02, 2025



Palmprint recognition has emerged as a prominent biometric technology, widely applied in diverse scenarios. Traditional handcrafted methods for palmprint recognition often fall short in representation capability, as they heavily depend on researchers' prior knowledge. Deep learning (DL) has been introduced to address this limitation, leveraging its remarkable successes across various domains. While existing surveys focus narrowly on specific tasks within palmprint recognition-often grounded in traditional methodologies-there remains a significant gap in comprehensive research exploring DL-based approaches across all facets of palmprint recognition. This paper bridges that gap by thoroughly reviewing recent advancements in DL-powered palmprint recognition. The paper systematically examines progress across key tasks, including region-of-interest segmentation, feature extraction, and security/privacy-oriented challenges. Beyond highlighting these advancements, the paper identifies current challenges and uncovers promising opportunities for future research. By consolidating state-of-the-art progress, this review serves as a valuable resource for researchers, enabling them to stay abreast of cutting-edge technologies and drive innovation in palmprint recognition.
Neural Solver Selection for Combinatorial Optimization
Oct 13, 2024



Machine learning has increasingly been employed to solve NP-hard combinatorial optimization problems, resulting in the emergence of neural solvers that demonstrate remarkable performance, even with minimal domain-specific knowledge. To date, the community has created numerous open-source neural solvers with distinct motivations and inductive biases. While considerable efforts are devoted to designing powerful single solvers, our findings reveal that existing solvers typically demonstrate complementary performance across different problem instances. This suggests that significant improvements could be achieved through effective coordination of neural solvers at the instance level. In this work, we propose the first general framework to coordinate the neural solvers, which involves feature extraction, selection model, and selection strategy, aiming to allocate each instance to the most suitable solvers. To instantiate, we collect several typical neural solvers with state-of-the-art performance as alternatives, and explore various methods for each component of the framework. We evaluated our framework on two extensively studied combinatorial optimization problems, Traveling Salesman Problem (TSP) and Capacitated Vehicle Routing Problem (CVRP). Experimental results show that the proposed framework can effectively distribute instances and the resulting composite solver can achieve significantly better performance (e.g., reduce the optimality gap by 0.88\% on TSPLIB and 0.71\% on CVRPLIB) than the best individual neural solver with little extra time cost.
Beyond First-Order: A Multi-Scale Approach to Finger Knuckle Print Biometrics
Jun 28, 2024Recently, finger knuckle prints (FKPs) have gained attention due to their rich textural patterns, positioning them as a promising biometric for identity recognition. Prior FKP recognition methods predominantly leverage first-order feature descriptors, which capture intricate texture details but fail to account for structural information. Emerging research, however, indicates that second-order textures, which describe the curves and arcs of the textures, encompass this overlooked structural information. This paper introduces a novel FKP recognition approach, the Dual-Order Texture Competition Network (DOTCNet), designed to capture texture information in FKP images comprehensively. DOTCNet incorporates three dual-order texture competitive modules (DTCMs), each targeting textures at different scales. Each DTCM employs a learnable texture descriptor, specifically a learnable Gabor filter (LGF), to extract texture features. By leveraging LGFs, the network extracts first and second order textures to describe fine textures and structural features thoroughly. Furthermore, an attention mechanism enhances relevant features in the first-order features, thereby highlighting significant texture details. For second-order features, a competitive mechanism emphasizes structural information while reducing noise from higher-order features. Extensive experimental results reveal that DOTCNet significantly outperforms several standard algorithms on the publicly available PolyU-FKP dataset.
Scale-aware competition network for palmprint recognition
Nov 21, 2023Palmprint biometrics garner heightened attention in palm-scanning payment and social security due to their distinctive attributes. However, prevailing methodologies singularly prioritize texture orientation, neglecting the significant texture scale dimension. We design an innovative network for concurrently extracting intra-scale and inter-scale features to redress this limitation. This paper proposes a scale-aware competitive network (SAC-Net), which includes the Inner-Scale Competition Module (ISCM) and the Across-Scale Competition Module (ASCM) to capture texture characteristics related to orientation and scale. ISCM efficiently integrates learnable Gabor filters and a self-attention mechanism to extract rich orientation data and discern textures with long-range discriminative properties. Subsequently, ASCM leverages a competitive strategy across various scales to effectively encapsulate the competitive texture scale elements. By synergizing ISCM and ASCM, our method adeptly characterizes palmprint features. Rigorous experimentation across three benchmark datasets unequivocally demonstrates our proposed approach's exceptional recognition performance and resilience relative to state-of-the-art alternatives.
Towards Generalizable Neural Solvers for Vehicle Routing Problems via Ensemble with Transferrable Local Policy
Aug 27, 2023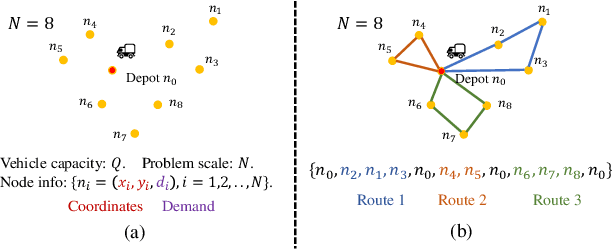
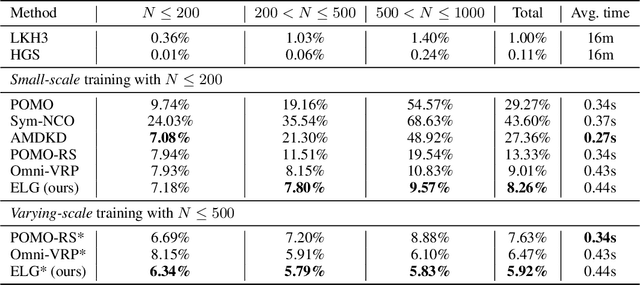
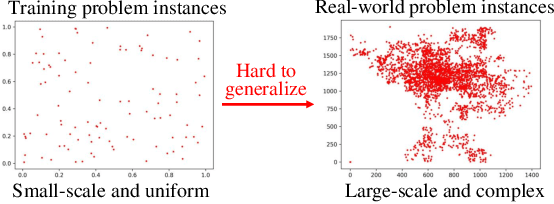

Machine learning has been adapted to help solve NP-hard combinatorial optimization problems. One prevalent way is learning to construct solutions by deep neural networks, which has been receiving more and more attention due to the high efficiency and less requirement for expert knowledge. However, many neural construction methods for Vehicle Routing Problems (VRPs) focus on synthetic problem instances with limited scales and specified node distributions, leading to poor performance on real-world problems which usually involve large scales together with complex and unknown node distributions. To make neural VRP solvers more practical in real-world scenarios, we design an auxiliary policy that learns from the local transferable topological features, named local policy, and integrate it with a typical constructive policy (which learns from the global information of VRP instances) to form an ensemble policy. With joint training, the aggregated policies perform cooperatively and complementarily to boost generalization. The experimental results on two well-known benchmarks, TSPLIB and CVRPLIB, of travelling salesman problem and capacitated VRP show that the ensemble policy consistently achieves better generalization than state-of-the-art construction methods and even works well on real-world problems with several thousand nodes.