 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Language Models for Out-of-Distribution Recovery in Reinforcement Learning
Mar 21, 2025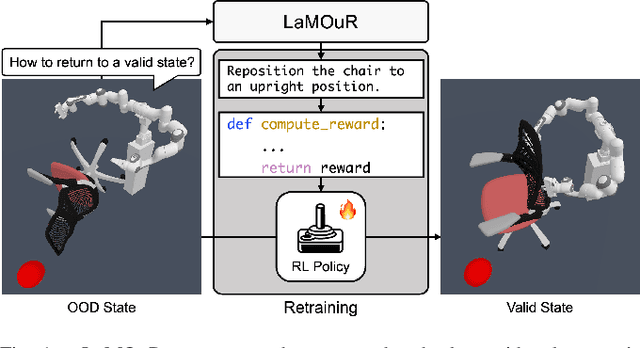
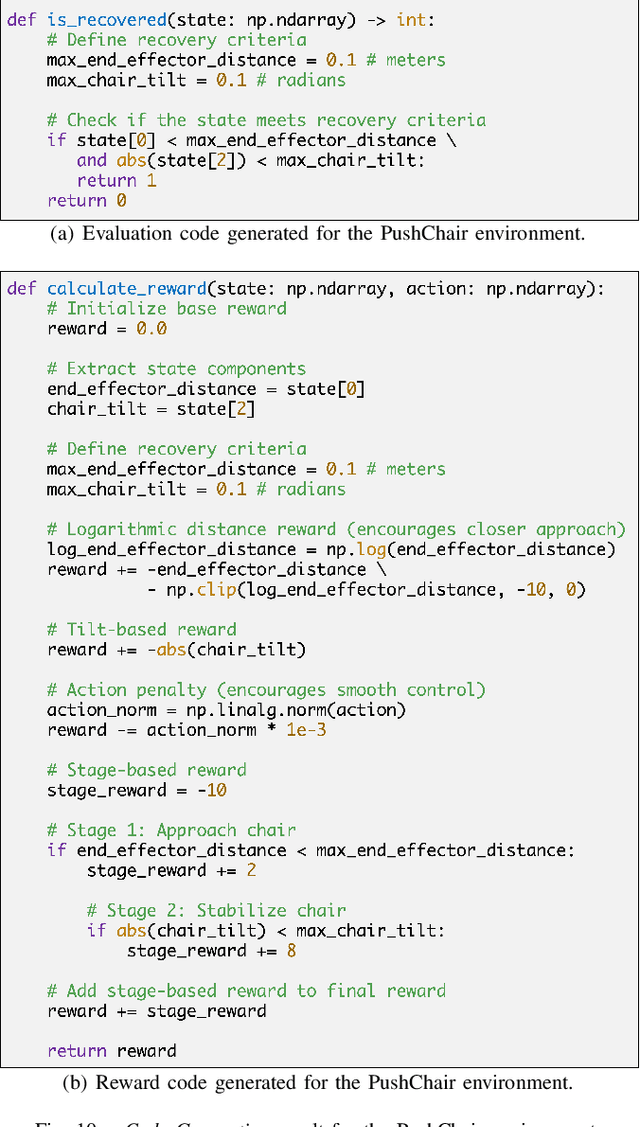


Deep Reinforcement Learning (DRL) has demonstrated strong performance in robotic control but remains susceptible to out-of-distribution (OOD) states, often resulting in unreliable actions and task failure. While previous methods have focused on minimizing or preventing OOD occurrences, they largely neglect recovery once an agent encounters such states. Although the latest research has attempted to address this by guiding agents back to in-distribution states, their reliance on uncertainty estimation hinders scalability in complex environments. To overcome this limitation, we introduce Language Models for Out-of-Distribution Recovery (LaMOuR), which enables recovery learning without relying on uncertainty estimation. LaMOuR generates dense reward codes that guide the agent back to a state where it can successfully perform its original task, leveraging the capabilities of LVLMs in image description, logical reasoning, and code generation. Experimental results show that LaMOuR substantially enhances recovery efficiency across diverse locomotion tasks and even generalizes effectively to complex environments, including humanoid locomotion and mobile manipulation, where existing methods struggle. The code and supplementary materials are available at \href{https://lamour-rl.github.io/}{https://lamour-rl.github.io/}.
E2Map: Experience-and-Emotion Map for Self-Reflective Robot Navigation with Language Models
Sep 16, 2024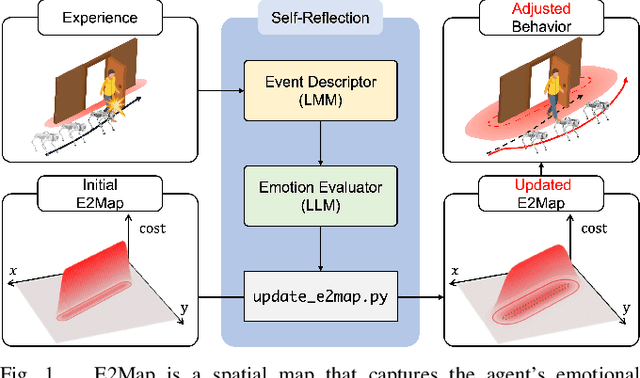
Large language models (LLMs) have shown significant potential in guiding embodied agents to execute language instructions across a range of tasks, including robotic manipulation and navigation. However, existing methods are primarily designed for static environments and do not leverage the agent's own experiences to refine its initial plans. Given that real-world environments are inherently stochastic, initial plans based solely on LLMs' general knowledge may fail to achieve their objectives, unlike in static scenarios. To address this limitation, this study introduces the Experience-and-Emotion Map (E2Map), which integrates not only LLM knowledge but also the agent's real-world experiences, drawing inspiration from human emotional responses. The proposed methodology enables one-shot behavior adjustments by updating the E2Map based on the agent's experiences. Our evaluation in stochastic navigation environments, including both simulations and real-world scenarios, demonstrates that the proposed method significantly enhances performance in stochastic environments compared to existing LLM-based approaches. Code and supplementary materials are available at https://e2map.github.io/.
Observation of Aerosolization-induced Morphological Changes in Viral Capsids
Jul 16, 2024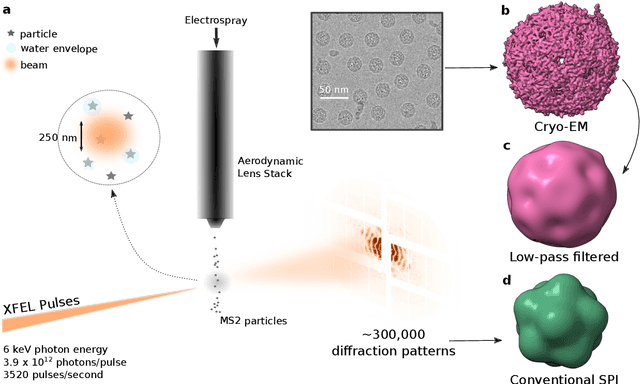
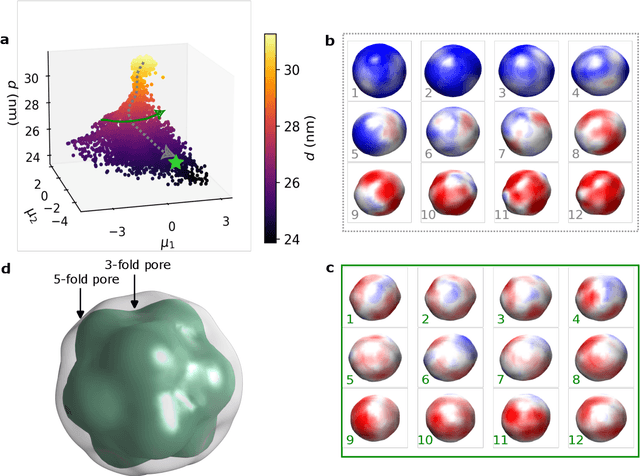
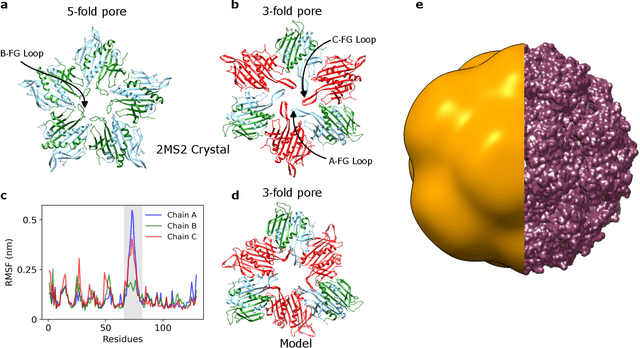
Single-stranded RNA viruses co-assemble their capsid with the genome and variations in capsid structures can have significant functional relevance. In particular, viruses need to respond to a dehydrating environment to prevent genomic degradation and remain active upon rehydration. Theoretical work has predicted low-energy buckling transitions in icosahedral capsids which could protect the virus from further dehydration. However, there has been no direct experimental evidence, nor molecular mechanism, for such behaviour. Here we observe this transition using X-ray single particle imaging of MS2 bacteriophages after aerosolization. Using a combination of machine learning tools, we classify hundreds of thousands of single particle diffraction patterns to learn the structural landscape of the capsid morphology as a function of time spent in the aerosol phase. We found a previously unreported compact conformation as well as intermediate structures which suggest an incoherent buckling transition which does not preserve icosahedral symmetry. Finally, we propose a mechanism of this buckling, where a single 19-residue loop is destabilised, leading to the large observed morphology change. Our results provide experimental evidence for a mechanism by which viral capsids protect themselves from dehydration. In the process, these findings also demonstrate the power of single particle X-ray imaging and machine learning methods in studying biomolecular structural dynamics.
MuNES: Multifloor Navigation Including Elevators and Stairs
Feb 07, 2024



We propose a scheme called MuNES for single mapping and trajectory planning including elevators and stairs. Optimized multifloor trajectories are important for optimal interfloor movements of robots. However, given two or more options of moving between floors, it is difficult to select the best trajectory because there are no suitable indoor multifloor maps in the existing methods. To solve this problem, MuNES creates a single multifloor map including elevators and stairs by estimating altitude changes based on pressure data. In addition, the proposed method performs floor-based loop detection for faster and more accurate loop closure. The single multifloor map is then voxelized leaving only the parts needed for trajectory planning. An optimal and realistic multifloor trajectory is generated by exploring the voxels using an A* algorithm based on the proposed cost function, which affects realistic factors. We tested this algorithm using data acquired from around a campus and note that a single accurate multifloor map could be created. Furthermore, optimal and realistic multifloor trajectory could be found by selecting the means of motion between floors between elevators and stairs according to factors such as the starting point, ending point, and elevator waiting time. The code and data used in this work are available at https://github.com/donghwijung/MuNES.
SeRO: Self-Supervised Reinforcement Learning for Recovery from Out-of-Distribution Situations
Nov 07, 2023



Robotic agents trained using reinforcement learning have the problem of taking unreliable actions in an out-of-distribution (OOD) state. Agents can easily become OOD in real-world environments because it is almost impossible for them to visit and learn the entire state space during training. Unfortunately, unreliable actions do not ensure that agents perform their original tasks successfully. Therefore, agents should be able to recognize whether they are in OOD states and learn how to return to the learned state distribution rather than continue to take unreliable actions. In this study, we propose a novel method for retraining agents to recover from OOD situations in a self-supervised manner when they fall into OOD states. Our in-depth experimental results demonstrate that our method substantially improves the agent's ability to recover from OOD situations in terms of sample efficiency and restoration of the performance for the original tasks. Moreover, we show that our method can retrain the agent to recover from OOD situations even when in-distribution states are difficult to visit through exploration.
Reinforcement Learning of Display Transfer Robots in Glass Flow Control Systems: A Physical Simulation-Based Approach
Oct 12, 2023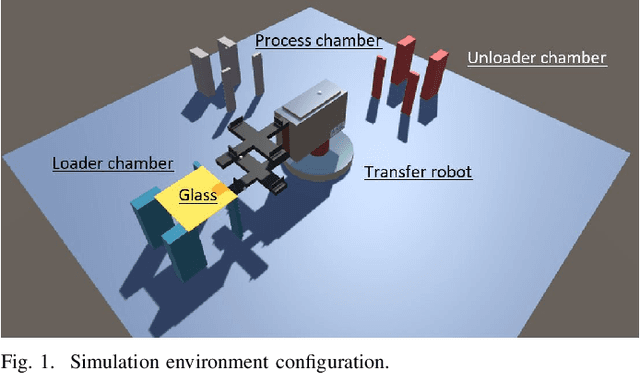
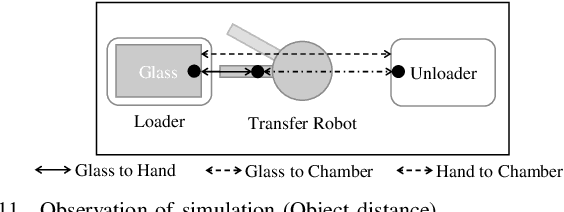
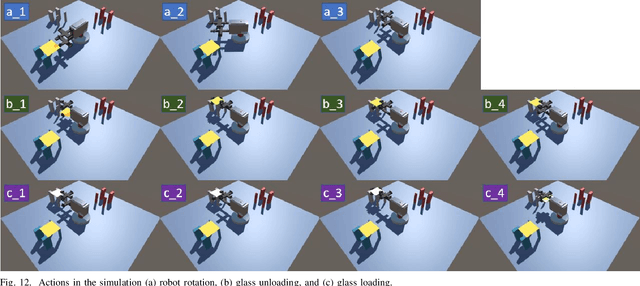
A flow control system is a critical concept for increasing the production capacity of manufacturing systems. To solve the scheduling optimization problem related to the flow control with the aim of improving productivity, existing methods depend on a heuristic design by domain human experts. Therefore, the methods require correction, monitoring, and verification by using real equipment. As system designs increase in complexity, the monitoring time increases, which decreases the probability of arriving at the optimal design. As an alternative approach to the heuristic design of flow control systems, the use of deep reinforcement learning to solve the scheduling optimization problem has been considered. Although the existing research on reinforcement learning has yielded excellent performance in some areas, the applicability of the results to actual FAB such as display and semiconductor manufacturing processes is not evident so far. To this end, we propose a method to implement a physical simulation environment and devise a feasible flow control system design using a transfer robot in display manufacturing through reinforcement learning. We present a model and parameter setting to build a virtual environment for different display transfer robots, and training methods of reinforcement learning on the environment to obtain an optimal scheduling of glass flow control systems. Its feasibility was verified by using different types of robots used in the actual process.
Megahertz X-ray Multi-projection imaging
May 19, 2023
X-ray time-resolved tomography is one of the most popular X-ray techniques to probe dynamics in three dimensions (3D). Recent developments in time-resolved tomography opened the possibility of recording kilohertz-rate 3D movies. However, tomography requires rotating the sample with respect to the X-ray beam, which prevents characterization of faster structural dynamics. Here, we present megahertz (MHz) X-ray multi-projection imaging (MHz-XMPI), a technique capable of recording volumetric information at MHz rates and micrometer resolution without scanning the sample. We achieved this by harnessing the unique megahertz pulse structure and intensity of the European X-ray Free-electron Laser with a combination of novel detection and reconstruction approaches that do not require sample rotations. Our approach enables generating multiple X-ray probes that simultaneously record several angular projections for each pulse in the megahertz pulse burst. We provide a proof-of-concept demonstration of the MHz-XMPI technique's capability to probe 4D (3D+time) information on stochastic phenomena and non-reproducible processes three orders of magnitude faster than state-of-the-art time-resolved X-ray tomography, by generating 3D movies of binary droplet collisions. We anticipate that MHz-XMPI will enable in-situ and operando studies that were impossible before, either due to the lack of temporal resolution or because the systems were opaque (such as for MHz imaging based on optical microscopy).
Time Series Forecasting with Hypernetworks Generating Parameters in Advance
Nov 22, 2022


Forecasting future outcomes from recent time series data is not easy, especially when the future data are different from the past (i.e. time series are under temporal drifts). Existing approaches show limited performances under data drifts, and we identify the main reason: It takes time for a model to collect sufficient training data and adjust its parameters for complicated temporal patterns whenever the underlying dynamics change. To address this issue, we study a new approach; instead of adjusting model parameters (by continuously re-training a model on new data), we build a hypernetwork that generates other target models' parameters expected to perform well on the future data. Therefore, we can adjust the model parameters beforehand (if the hypernetwork is correct). We conduct extensive experiments with 6 target models, 6 baselines, and 4 datasets, and show that our HyperGPA outperforms other baselines.