 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeamlessly Natural: Image Stitching with Natural Appearance Preservation
Jan 03, 2026This paper introduces SENA (SEamlessly NAtural), a geometry-driven image stitching approach that prioritizes structural fidelity in challenging real-world scenes characterized by parallax and depth variation. Conventional image stitching relies on homographic alignment, but this rigid planar assumption often fails in dual-camera setups with significant scene depth, leading to distortions such as visible warps and spherical bulging. SENA addresses these fundamental limitations through three key contributions. First, we propose a hierarchical affine-based warping strategy, combining global affine initialization with local affine refinement and smooth free-form deformation. This design preserves local shape, parallelism, and aspect ratios, thereby avoiding the hallucinated structural distortions commonly introduced by homography-based models. Second, we introduce a geometry-driven adequate zone detection mechanism that identifies parallax-minimized regions directly from the disparity consistency of RANSAC-filtered feature correspondences, without relying on semantic segmentation. Third, building upon this adequate zone, we perform anchor-based seamline cutting and segmentation, enforcing a one-to-one geometric correspondence across image pairs by construction, which effectively eliminates ghosting, duplication, and smearing artifacts in the final panorama. Extensive experiments conducted on challenging datasets demonstrate that SENA achieves alignment accuracy comparable to leading homography-based methods, while significantly outperforming them in critical visual metrics such as shape preservation, texture integrity, and overall visual realism.
MANGO: Multimodal Attention-based Normalizing Flow Approach to Fusion Learning
Aug 13, 2025Multimodal learning has gained much success in recent years. However, current multimodal fusion methods adopt the attention mechanism of Transformers to implicitly learn the underlying correlation of multimodal features. As a result, the multimodal model cannot capture the essential features of each modality, making it difficult to comprehend complex structures and correlations of multimodal inputs. This paper introduces a novel Multimodal Attention-based Normalizing Flow (MANGO) approach\footnote{The source code of this work will be publicly available.} to developing explicit, interpretable, and tractable multimodal fusion learning. In particular, we propose a new Invertible Cross-Attention (ICA) layer to develop the Normalizing Flow-based Model for multimodal data. To efficiently capture the complex, underlying correlations in multimodal data in our proposed invertible cross-attention layer, we propose three new cross-attention mechanisms: Modality-to-Modality Cross-Attention (MMCA), Inter-Modality Cross-Attention (IMCA), and Learnable Inter-Modality Cross-Attention (LICA). Finally, we introduce a new Multimodal Attention-based Normalizing Flow to enable the scalability of our proposed method to high-dimensional multimodal data. Our experimental results on three different multimodal learning tasks, i.e., semantic segmentation, image-to-image translation, and movie genre classification, have illustrated the state-of-the-art (SoTA) performance of the proposed approach.
Programmable EM Sensor Array for Golden-Model Free Run-time Trojan Detection and Localization
Jan 22, 2024

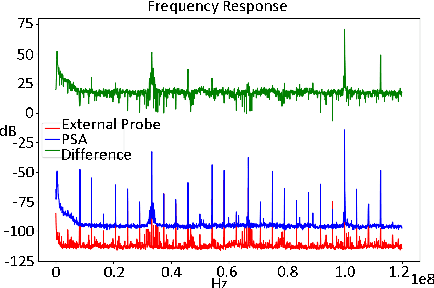

Side-channel analysis has been proven effective at detecting hardware Trojans in integrated circuits (ICs). However, most detection techniques rely on large external probes and antennas for data collection and require a long measurement time to detect Trojans. Such limitations make these techniques impractical for run-time deployment and ineffective in detecting small Trojans with subtle side-channel signatures. To overcome these challenges, we propose a Programmable Sensor Array (PSA) for run-time hardware Trojan detection, localization, and identification. PSA is a tampering-resilient integrated on-chip magnetic field sensor array that can be re-programmed to change the sensors' shape, size, and location. Using PSA, EM side-channel measurement results collected from sensors at different locations on an IC can be analyzed to localize and identify the Trojan. The PSA has better performance than conventional external magnetic probes and state-of-the-art on-chip single-coil magnetic field sensors. We fabricated an AES-128 test chip with four AES Hardware Trojans. They were successfully detected, located, and identified with the proposed on-chip PSA within 10 milliseconds using our proposed cross-domain analysis.
SeRO: Self-Supervised Reinforcement Learning for Recovery from Out-of-Distribution Situations
Nov 07, 2023



Robotic agents trained using reinforcement learning have the problem of taking unreliable actions in an out-of-distribution (OOD) state. Agents can easily become OOD in real-world environments because it is almost impossible for them to visit and learn the entire state space during training. Unfortunately, unreliable actions do not ensure that agents perform their original tasks successfully. Therefore, agents should be able to recognize whether they are in OOD states and learn how to return to the learned state distribution rather than continue to take unreliable actions. In this study, we propose a novel method for retraining agents to recover from OOD situations in a self-supervised manner when they fall into OOD states. Our in-depth experimental results demonstrate that our method substantially improves the agent's ability to recover from OOD situations in terms of sample efficiency and restoration of the performance for the original tasks. Moreover, we show that our method can retrain the agent to recover from OOD situations even when in-distribution states are difficult to visit through exploration.
TrustToken, a Trusted SoC solution for Non-Trusted Intellectual Property s
Sep 26, 2022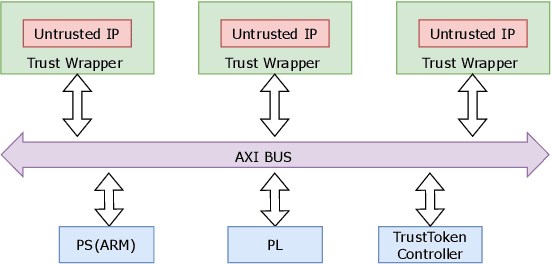
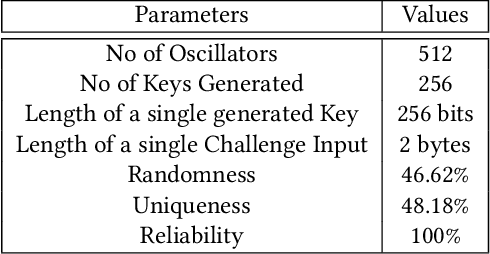
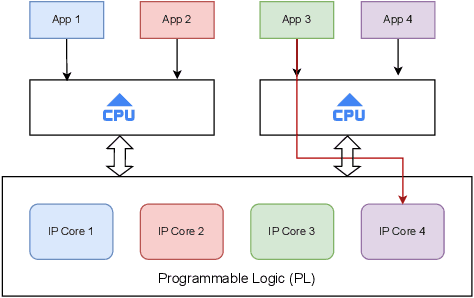
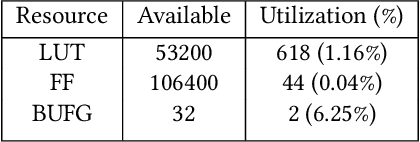
Secure and trustworthy execution in heterogeneous SoCs is a major priority in the modern computing system. Security of SoCs mainly addresses two broad layers of trust issues: 1. Protection against hardware security threats(Side-channel, IP Privacy, Cloning, Fault Injection, and Denial of Service); and 2. Protection against malicious software attacks running on SoC processors. To resist malicious software-level attackers from gaining unauthorized access and compromising security, we propose a root of trust-based trusted execution mechanism \textbf{\textit{(named as \textbf{TrustToken}) }}. TrustToken builds a security block to provide a root of trust-based IP security: secure key generation and truly random source. \textbf{TrustToken} only allows trusted communication between the non-trusted third-party IP and the rest of the SoC world by providing essential security features, i.e., secure, isolated execution, and trusted user interaction. The proposed design achieves this by interconnecting the third-party IP interface to \textbf{TrustToken} Controller and checking IP authorization(Token) signals \texttt{`correctness'} at run-time. \textbf{TrustToken} architecture shows a very low overhead resource utilization LUT (618, 1.16 \%), FF (44, 0.04 \%), and BUFG (2 , 6.25\%) in implementation. The experiment results show that TrustToken can provide a secure, low-cost, and trusted solution for non-trusted SoC IPs.
Event Camera Simulator Design for Modeling Attention-based Inference Architectures
May 03, 2021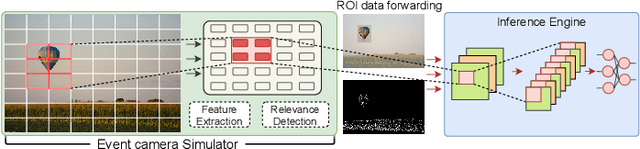
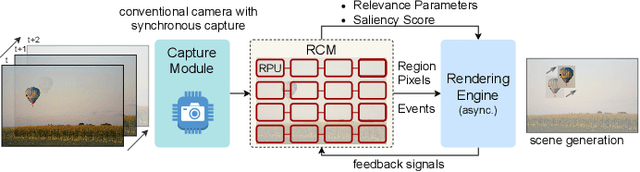
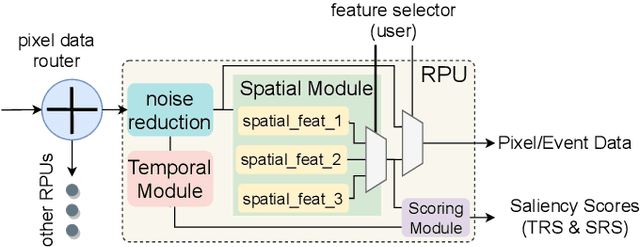
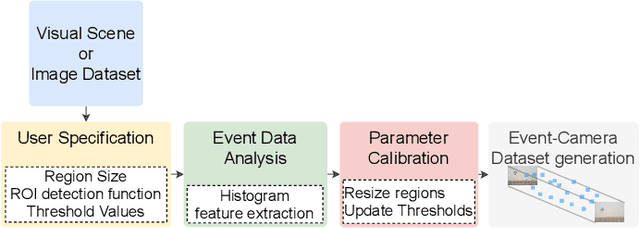
In recent years, there has been a growing interest in realizing methodologies to integrate more and more computation at the level of the image sensor. The rising trend has seen an increased research interest in developing novel event cameras that can facilitate CNN computation directly in the sensor. However, event-based cameras are not generally available in the market, limiting performance exploration on high-level models and algorithms. This paper presents an event camera simulator that can be a potent tool for hardware design prototyping, parameter optimization, attention-based innovative algorithm development, and benchmarking. The proposed simulator implements a distributed computation model to identify relevant regions in an image frame. Our simulator's relevance computation model is realized as a collection of modules and performs computations in parallel. The distributed computation model is configurable, making it highly useful for design space exploration. The Rendering engine of the simulator samples frame-regions only when there is a new event. The simulator closely emulates an image processing pipeline similar to that of physical cameras. Our experimental results show that the simulator can effectively emulate event vision with low overheads.