 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCurvature-aware Expected Free Energy as an Acquisition Function for Bayesian Optimization
Mar 27, 2026We propose an Expected Free Energy-based acquisition function for Bayesian optimization to solve the joint learning and optimization problem, i.e., optimize and learn the underlying function simultaneously. We show that, under specific assumptions, Expected Free Energy reduces to Upper Confidence Bound, Lower Confidence Bound, and Expected Information Gain. We prove that Expected Free Energy has unbiased convergence guarantees for concave functions. Using the results from these derivations, we introduce a curvature-aware update law for Expected Free Energy and show its proof of concept using a system identification problem on a Van der Pol oscillator. Through rigorous simulation experiments, we show that our adaptive Expected Free Energy-based acquisition function outperforms state-of-the-art acquisition functions with the least final simple regret and error in learning the Gaussian process.
Designing Tools with Control Confidence
Oct 14, 2025Prehistoric humans invented stone tools for specialized tasks by not just maximizing the tool's immediate goal-completion accuracy, but also increasing their confidence in the tool for later use under similar settings. This factor contributed to the increased robustness of the tool, i.e., the least performance deviations under environmental uncertainties. However, the current autonomous tool design frameworks solely rely on performance optimization, without considering the agent's confidence in tool use for repeated use. Here, we take a step towards filling this gap by i) defining an optimization framework for task-conditioned autonomous hand tool design for robots, where ii) we introduce a neuro-inspired control confidence term into the optimization routine that helps the agent to design tools with higher robustness. Through rigorous simulations using a robotic arm, we show that tools designed with control confidence as the objective function are more robust to environmental uncertainties during tool use than a pure accuracy-driven objective. We further show that adding control confidence to the objective function for tool design provides a balance between the robustness and goal accuracy of the designed tools under control perturbations. Finally, we show that our CMAES-based evolutionary optimization strategy for autonomous tool design outperforms other state-of-the-art optimizers by designing the optimal tool within the fewest iterations. Code: https://github.com/ajitham123/Tool_design_control_confidence.
Confidence-Aware Decision-Making and Control for Tool Selection
Mar 06, 2024Self-reflecting about our performance (e.g., how confident we are) before doing a task is essential for decision making, such as selecting the most suitable tool or choosing the best route to drive. While this form of awareness -- thinking about our performance or metacognitive performance -- is well-known in humans, robots still lack this cognitive ability. This reflective monitoring can enhance their embodied decision power, robustness and safety. Here, we take a step in this direction by introducing a mathematical framework that allows robots to use their control self-confidence to make better-informed decisions. We derive a mathematical closed-form expression for control confidence for dynamic systems (i.e., the posterior inverse covariance of the control action). This control confidence seamlessly integrates within an objective function for decision making, that balances the: i) performance for task completion, ii) control effort, and iii) self-confidence. To evaluate our theoretical account, we framed the decision-making within the tool selection problem, where the agent has to select the best robot arm for a particular control task. The statistical analysis of the numerical simulations with randomized 2DOF arms shows that using control confidence during tool selection improves both real task performance, and the reliability of the tool for performance under unmodelled perturbations (e.g., external forces). Furthermore, our results indicate that control confidence is an early indicator of performance and thus, it can be used as a heuristic for making decisions when computation power is restricted or decision-making is intractable. Overall, we show the advantages of using confidence-aware decision-making and control scheme for dynamic systems.
Adaptive Noise Covariance Estimation under Colored Noise using Dynamic Expectation Maximization
Aug 15, 2023The accurate estimation of the noise covariance matrix (NCM) in a dynamic system is critical for state estimation and control, as it has a major influence in their optimality. Although a large number of NCM estimation methods have been developed, most of them assume the noises to be white. However, in many real-world applications, the noises are colored (e.g., they exhibit temporal autocorrelations), resulting in suboptimal solutions. Here, we introduce a novel brain-inspired algorithm that accurately and adaptively estimates the NCM for dynamic systems subjected to colored noise. Particularly, we extend the Dynamic Expectation Maximization algorithm to perform both online noise covariance and state estimation by optimizing the free energy objective. We mathematically prove that our NCM estimator converges to the global optimum of this free energy objective. Using randomized numerical simulations, we show that our estimator outperforms nine baseline methods with minimal noise covariance estimation error under colored noise conditions. Notably, we show that our method outperforms the best baseline (Variational Bayes) in joint noise and state estimation for high colored noise. We foresee that the accuracy and the adaptive nature of our estimator make it suitable for online estimation in real-world applications.
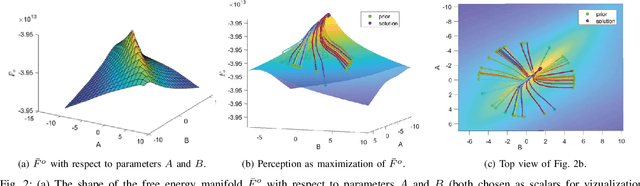
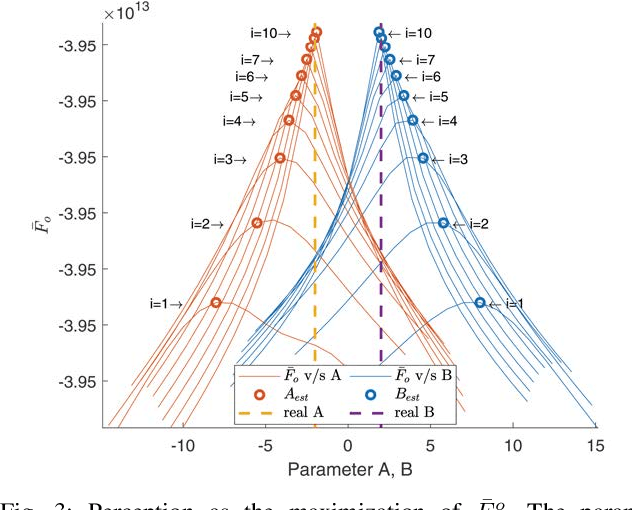
Free Energy Principle for the Noise Smoothness Estimation of Linear Systems with Colored Noise
Apr 04, 2022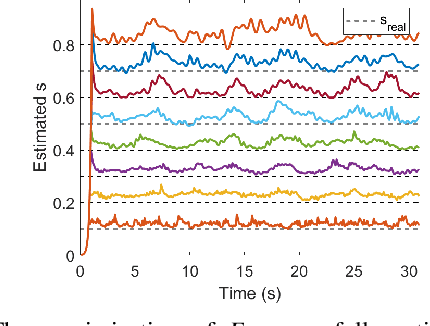
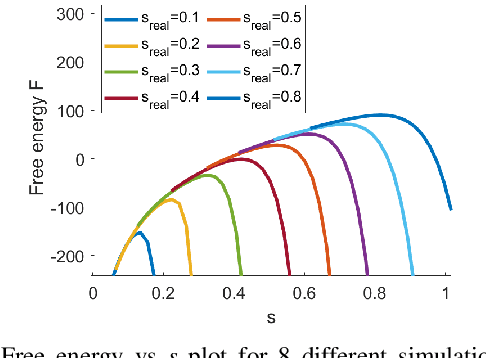
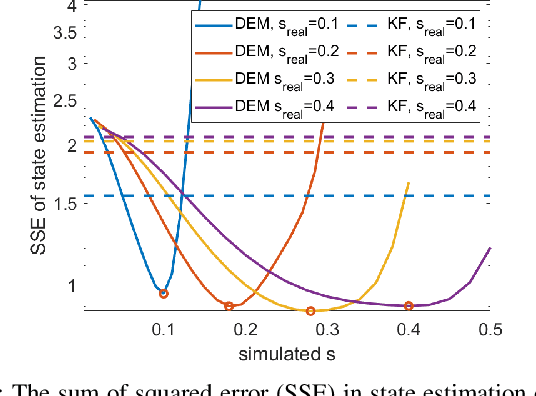
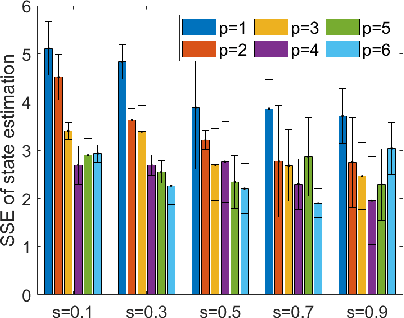
The free energy principle (FEP) from neuroscience provides a framework called active inference for the joint estimation and control of state space systems, subjected to colored noise. However, the active inference community has been challenged with the critical task of manually tuning the noise smoothness parameter. To solve this problem, we introduce a novel online noise smoothness estimator based on the idea of free energy principle. We mathematically show that our estimator can converge to the free energy optimum during smoothness estimation. Using this formulation, we introduce a joint state and noise smoothness observer design called DEMs. Through rigorous simulations, we show that DEMs outperforms state-of-the-art state observers with least state estimation error. Finally, we provide a proof of concept for DEMs by applying it on a real life robotics problem - state estimation of a quadrotor hovering in wind, demonstrating its practical use.
Reclaiming saliency: rhythmic precision-modulated action and perception
Mar 23, 2022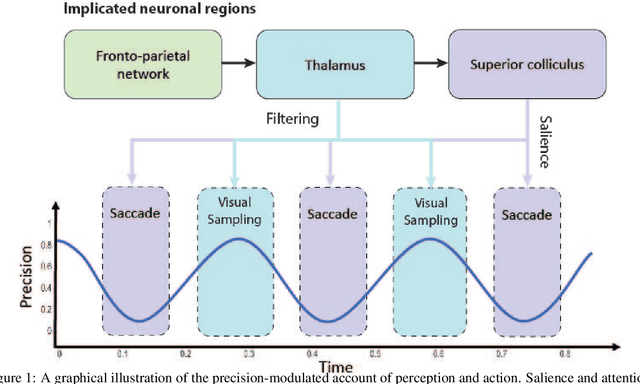
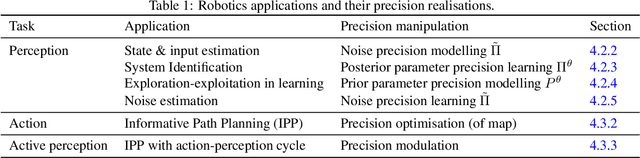
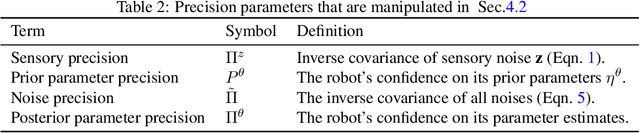
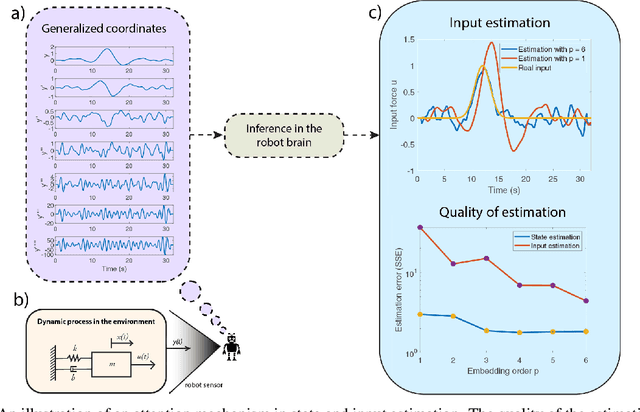
Computational models of visual attention in artificial intelligence and robotics have been inspired by the concept of a saliency map. These models account for the mutual information between the (current) visual information and its estimated causes. However, they fail to consider the circular causality between perception and action. In other words, they do not consider where to sample next, given current beliefs. Here, we reclaim salience as an active inference process that relies on two basic principles: uncertainty minimisation and rhythmic scheduling. For this, we make a distinction between attention and salience. Briefly, we associate attention with precision control, i.e., the confidence with which beliefs can be updated given sampled sensory data, and salience with uncertainty minimisation that underwrites the selection of future sensory data. Using this, we propose a new account of attention based on rhythmic precision-modulation and discuss its potential in robotics, providing numerical experiments that showcase advantages of precision-modulation for state and noise estimation, system identification and action selection for informative path planning.
Active Inference in Robotics and Artificial Agents: Survey and Challenges
Dec 03, 2021
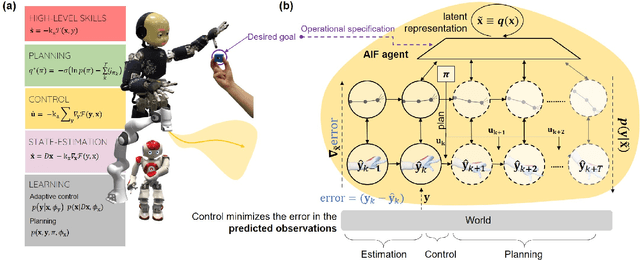
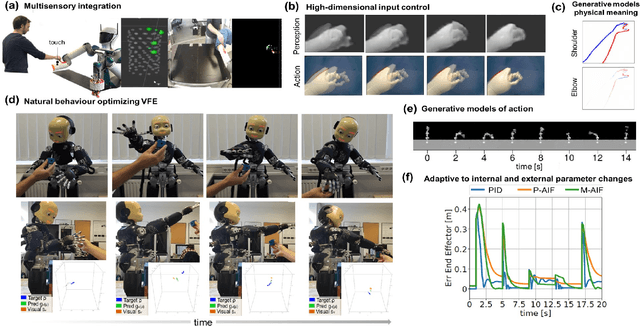
Active inference is a mathematical framework which originated in computational neuroscience as a theory of how the brain implements action, perception and learning. Recently, it has been shown to be a promising approach to the problems of state-estimation and control under uncertainty, as well as a foundation for the construction of goal-driven behaviours in robotics and artificial agents in general. Here, we review the state-of-the-art theory and implementations of active inference for state-estimation, control, planning and learning; describing current achievements with a particular focus on robotics. We showcase relevant experiments that illustrate its potential in terms of adaptation, generalization and robustness. Furthermore, we connect this approach with other frameworks and discuss its expected benefits and challenges: a unified framework with functional biological plausibility using variational Bayesian inference.
Free Energy Principle for State and Input Estimation of a Quadcopter Flying in Wind
Sep 24, 2021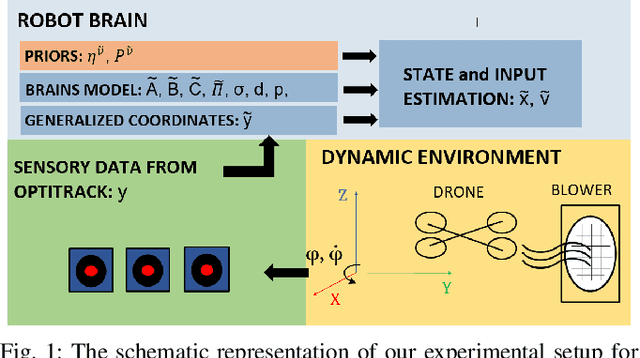
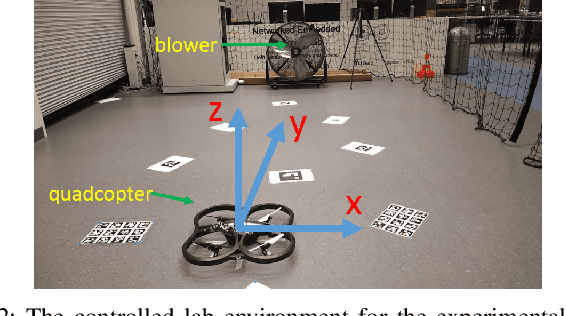
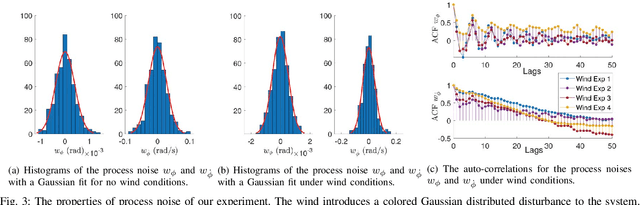
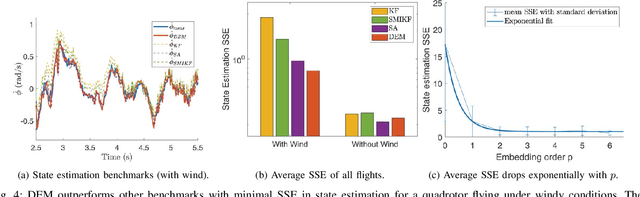
The free energy principle from neuroscience provides a brain-inspired perception scheme through a data-driven model learning algorithm called Dynamic Expectation Maximization (DEM). This paper aims at introducing an experimental design to provide the first experimental confirmation of the usefulness of DEM as a state and input estimator for real robots. Through a series of quadcopter flight experiments under unmodelled wind dynamics, we prove that DEM can leverage the information from colored noise for accurate state and input estimation through the use of generalized coordinates. We demonstrate the superior performance of DEM for state estimation under colored noise with respect to other benchmarks like State Augmentation, SMIKF and Kalman Filtering through its minimal estimation error. We demonstrate the similarities in the performance of DEM and Unknown Input Observer (UIO) for input estimation. The paper concludes by showing the influence of prior beliefs in shaping the accuracy-complexity trade-off during DEM's estimation.
A Brain Inspired Learning Algorithm for the Perception of a Quadrotor in Wind
Sep 24, 2021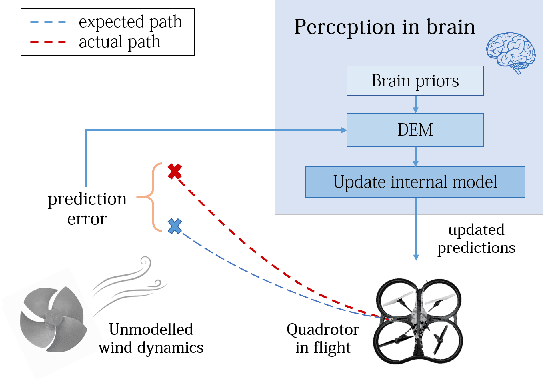

The quest for a brain-inspired learning algorithm for robots has culminated in the free energy principle from neuroscience that models the brain's perception and action as an optimization over its free energy objectives. Based on this idea, we propose an estimation algorithm for accurate output prediction of a quadrotor flying under unmodelled wind conditions. The key idea behind this work is the handling of unmodelled wind dynamics and the model's non-linearity errors as coloured noise in the system, and leveraging it for accurate output predictions. This paper provides the first experimental validation for the usefulness of generalized coordinates for robot perception using Dynamic Expectation Maximization (DEM). Through real flight experiments, we show that the estimator outperforms classical estimators with the least error in output predictions. Based on the experimental results, we extend the DEM algorithm for model order selection for complete black box identification. With this paper, we provide the first experimental validation of DEM applied to robot learning.
Obstacle-aware Adaptive Informative Path Planning for UAV-based Target Search
Feb 26, 2019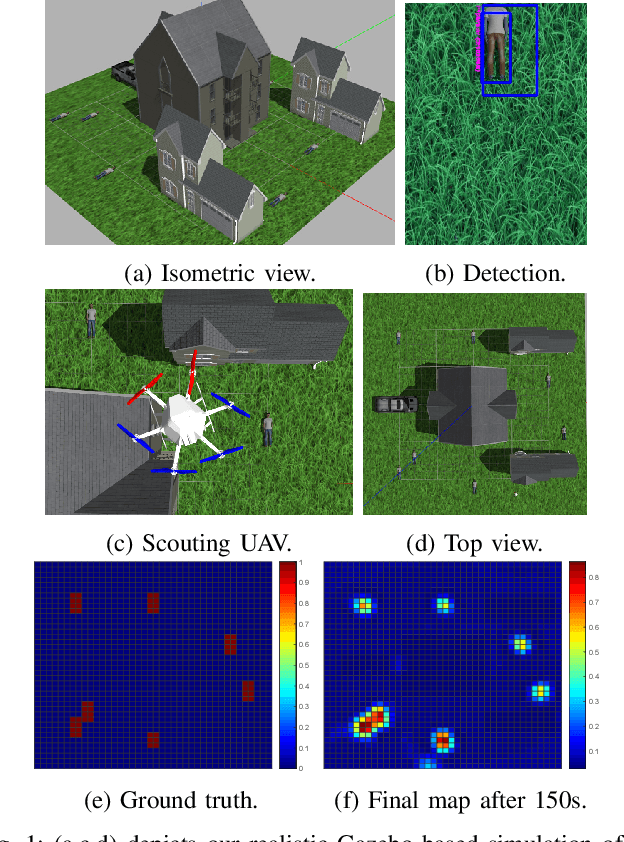
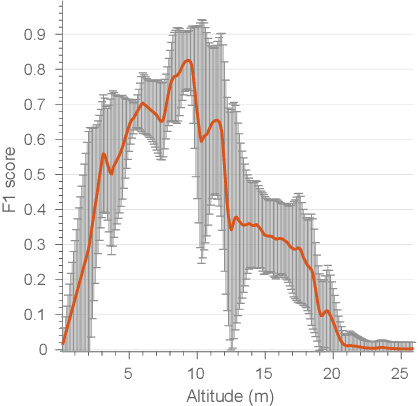
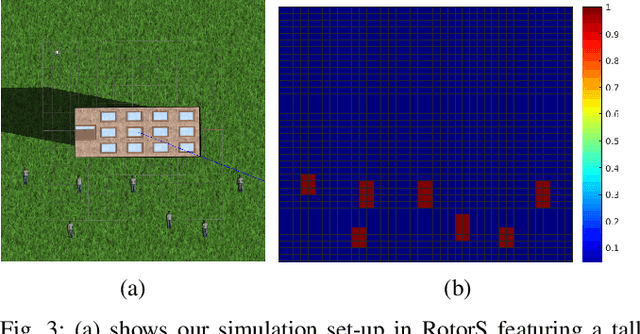
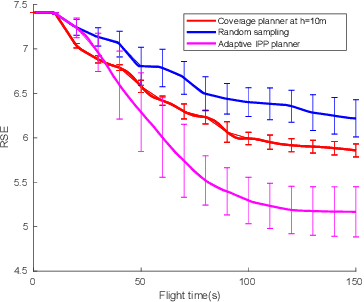
Target search with unmanned aerial vehicles (UAVs) is relevant problem to many scenarios, e.g., search and rescue (SaR). However, a key challenge is planning paths for maximal search efficiency given flight time constraints. To address this, we propose the Obstacle-aware Adaptive Informative Path Planning (OA-IPP) algorithm for target search in cluttered environments using UAVs. Our approach leverages a layered planning strategy using a Gaussian Process (GP)-based model of target occupancy to generate informative paths in continuous 3D space. Within this framework, we introduce an adaptive replanning scheme which allows us to trade off between information gain, field coverage, sensor performance, and collision avoidance for efficient target detection. Extensive simulations show that our OA-IPP method performs better than state-of-the-art planners, and we demonstrate its application in a realistic urban SaR scenario.