 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Brain Inspired Learning Algorithm for the Perception of a Quadrotor in Wind
Paper and Code
Sep 24, 2021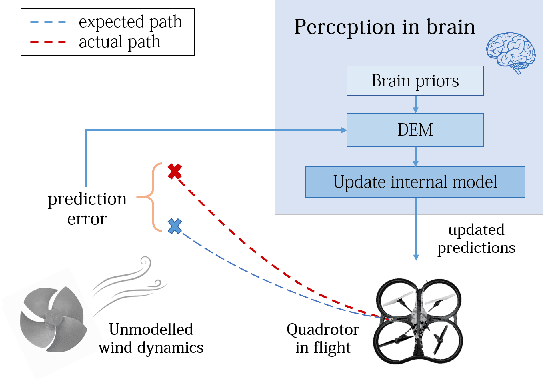

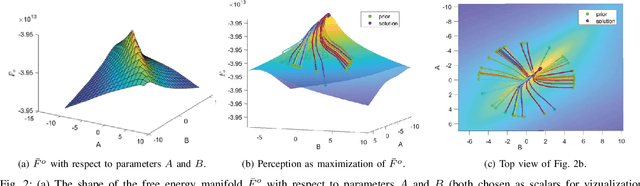
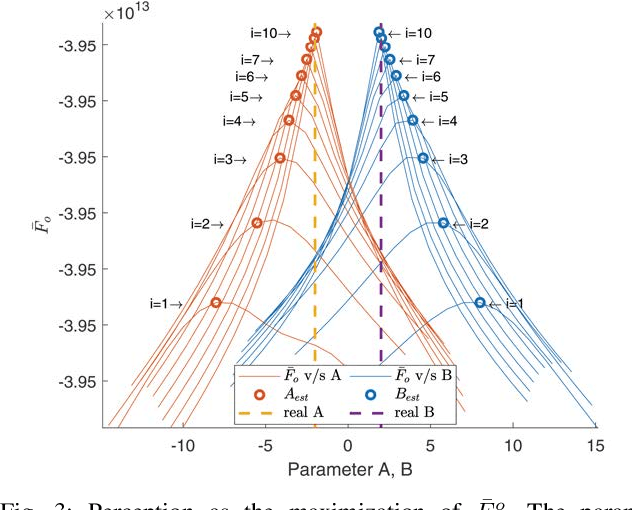
The quest for a brain-inspired learning algorithm for robots has culminated in the free energy principle from neuroscience that models the brain's perception and action as an optimization over its free energy objectives. Based on this idea, we propose an estimation algorithm for accurate output prediction of a quadrotor flying under unmodelled wind conditions. The key idea behind this work is the handling of unmodelled wind dynamics and the model's non-linearity errors as coloured noise in the system, and leveraging it for accurate output predictions. This paper provides the first experimental validation for the usefulness of generalized coordinates for robot perception using Dynamic Expectation Maximization (DEM). Through real flight experiments, we show that the estimator outperforms classical estimators with the least error in output predictions. Based on the experimental results, we extend the DEM algorithm for model order selection for complete black box identification. With this paper, we provide the first experimental validation of DEM applied to robot learning.