 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Data to Safe Mobile Robot Navigation: An Efficient and Modular Robust MPC Design Pipeline
Aug 09, 2025Model predictive control (MPC) is a powerful strategy for planning and control in autonomous mobile robot navigation. However, ensuring safety in real-world deployments remains challenging due to the presence of disturbances and measurement noise. Existing approaches often rely on idealized assumptions, neglect the impact of noisy measurements, and simply heuristically guess unrealistic bounds. In this work, we present an efficient and modular robust MPC design pipeline that systematically addresses these limitations. The pipeline consists of an iterative procedure that leverages closed-loop experimental data to estimate disturbance bounds and synthesize a robust output-feedback MPC scheme. We provide the pipeline in the form of deterministic and reproducible code to synthesize the robust output-feedback MPC from data. We empirically demonstrate robust constraint satisfaction and recursive feasibility in quadrotor simulations using Gazebo.
A Step-by-step Guide on Nonlinear Model Predictive Control for Safe Mobile Robot Navigation
Jul 23, 2025Designing a Model Predictive Control (MPC) scheme that enables a mobile robot to safely navigate through an obstacle-filled environment is a complicated yet essential task in robotics. In this technical report, safety refers to ensuring that the robot respects state and input constraints while avoiding collisions with obstacles despite the presence of disturbances and measurement noise. This report offers a step-by-step approach to implementing Nonlinear Model Predictive Control (NMPC) schemes addressing these safety requirements. Numerous books and survey papers provide comprehensive overviews of linear MPC (LMPC) \cite{bemporad2007robust,kouvaritakis2016model}, NMPC \cite{rawlings2017model,allgower2004nonlinear,mayne2014model,grune2017nonlinear,saltik2018outlook}, and their applications in various domains, including robotics \cite{nascimento2018nonholonomic,nguyen2021model,shi2021advanced,wei2022mpc}. This report does not aim to replicate those exhaustive reviews. Instead, it focuses specifically on NMPC as a foundation for safe mobile robot navigation. The goal is to provide a practical and accessible path from theoretical concepts to mathematical proofs and implementation, emphasizing safety and performance guarantees. It is intended for researchers, robotics engineers, and practitioners seeking to bridge the gap between theoretical NMPC formulations and real-world robotic applications. This report is not necessarily meant to remain fixed over time. If someone finds an error in the presented theory, please reach out via the given email addresses. We are happy to update the document if necessary.
Embedded Hierarchical MPC for Autonomous Navigation
Jun 17, 2024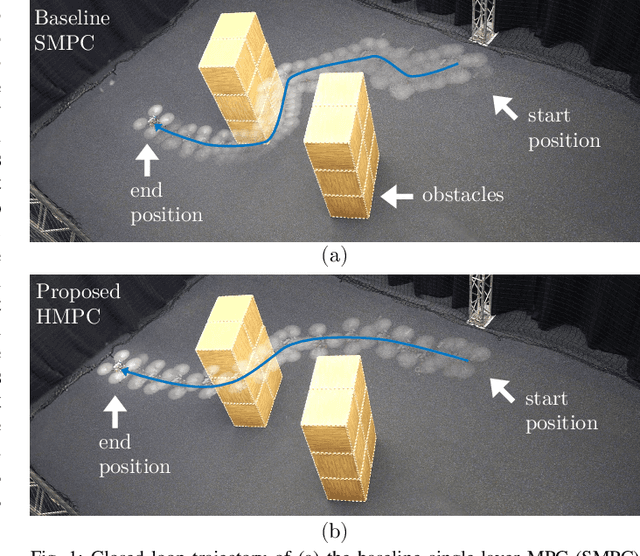
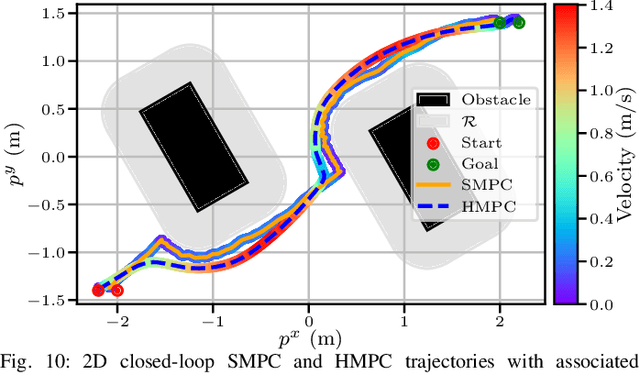
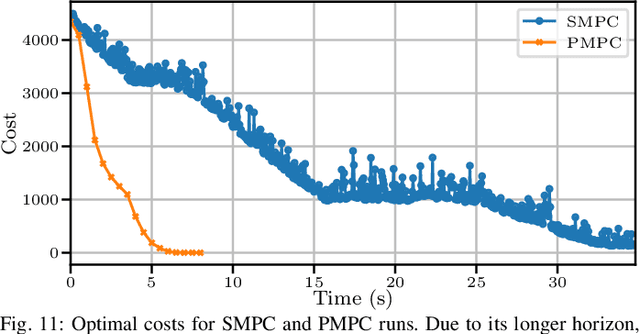
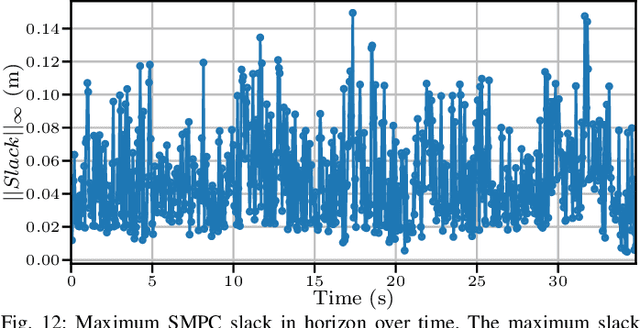
To efficiently deploy robotic systems in society, mobile robots need to autonomously and safely move through complex environments. Nonlinear model predictive control (MPC) methods provide a natural way to find a dynamically feasible trajectory through the environment without colliding with nearby obstacles. However, the limited computation power available on typical embedded robotic systems, such as quadrotors, poses a challenge to running MPC in real-time, including its most expensive tasks: constraints generation and optimization. To address this problem, we propose a novel hierarchical MPC scheme that interconnects a planning and a tracking layer. The planner constructs a trajectory with a long prediction horizon at a slow rate, while the tracker ensures trajectory tracking at a relatively fast rate. We prove that the proposed framework avoids collisions and is recursively feasible. Furthermore, we demonstrate its effectiveness in simulations and lab experiments with a quadrotor that needs to reach a goal position in a complex static environment. The code is efficiently implemented on the quadrotor's embedded computer to ensure real-time feasibility. Compared to a state-of-the-art single-layer MPC formulation, this allows us to increase the planning horizon by a factor of 5, which results in significantly better performance.
Free Energy Principle for State and Input Estimation of a Quadcopter Flying in Wind
Sep 24, 2021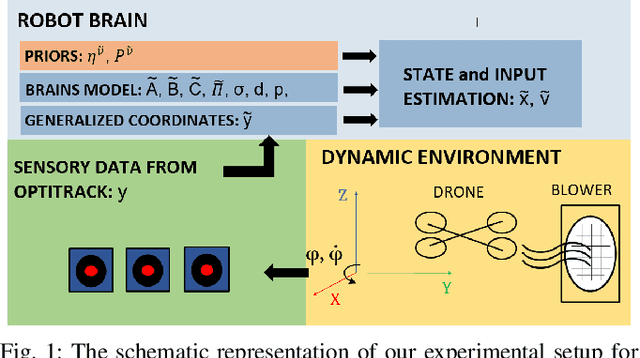
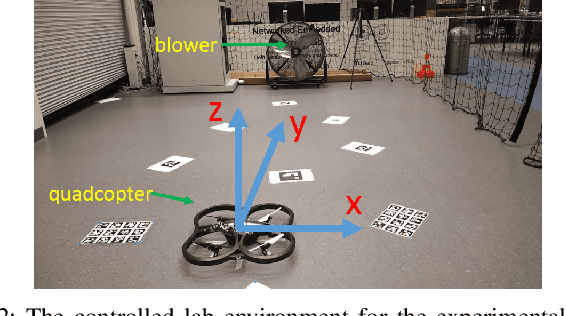
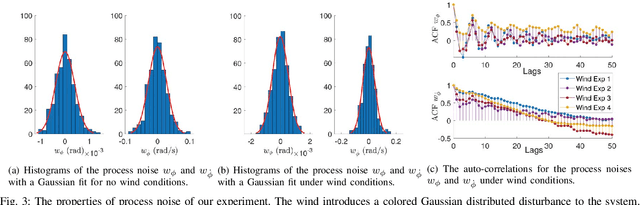
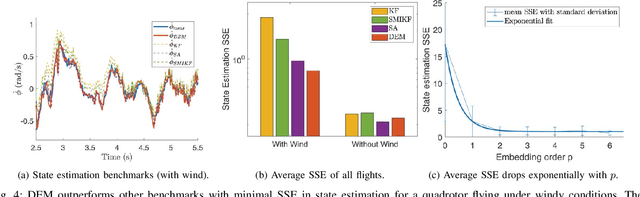
The free energy principle from neuroscience provides a brain-inspired perception scheme through a data-driven model learning algorithm called Dynamic Expectation Maximization (DEM). This paper aims at introducing an experimental design to provide the first experimental confirmation of the usefulness of DEM as a state and input estimator for real robots. Through a series of quadcopter flight experiments under unmodelled wind dynamics, we prove that DEM can leverage the information from colored noise for accurate state and input estimation through the use of generalized coordinates. We demonstrate the superior performance of DEM for state estimation under colored noise with respect to other benchmarks like State Augmentation, SMIKF and Kalman Filtering through its minimal estimation error. We demonstrate the similarities in the performance of DEM and Unknown Input Observer (UIO) for input estimation. The paper concludes by showing the influence of prior beliefs in shaping the accuracy-complexity trade-off during DEM's estimation.