 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFree Energy Principle for State and Input Estimation of a Quadcopter Flying in Wind
Paper and Code
Sep 24, 2021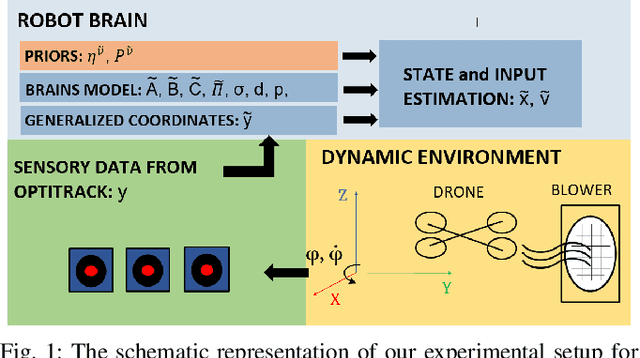
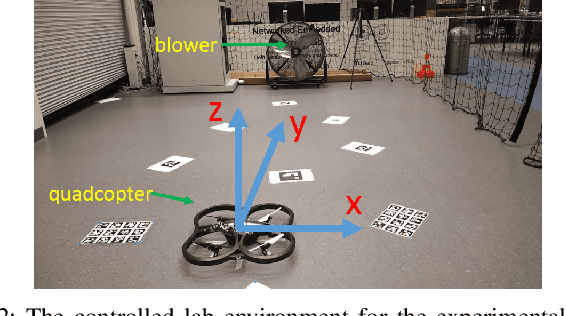
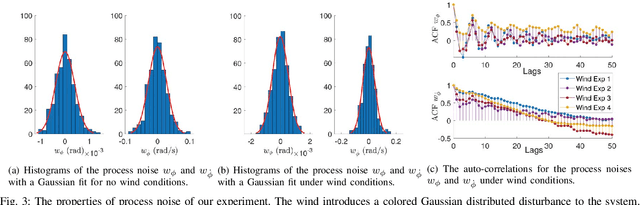
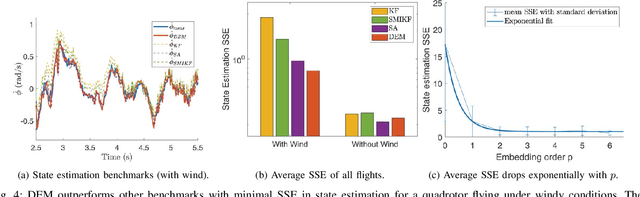
The free energy principle from neuroscience provides a brain-inspired perception scheme through a data-driven model learning algorithm called Dynamic Expectation Maximization (DEM). This paper aims at introducing an experimental design to provide the first experimental confirmation of the usefulness of DEM as a state and input estimator for real robots. Through a series of quadcopter flight experiments under unmodelled wind dynamics, we prove that DEM can leverage the information from colored noise for accurate state and input estimation through the use of generalized coordinates. We demonstrate the superior performance of DEM for state estimation under colored noise with respect to other benchmarks like State Augmentation, SMIKF and Kalman Filtering through its minimal estimation error. We demonstrate the similarities in the performance of DEM and Unknown Input Observer (UIO) for input estimation. The paper concludes by showing the influence of prior beliefs in shaping the accuracy-complexity trade-off during DEM's estimation.