 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReclaiming saliency: rhythmic precision-modulated action and perception
Paper and Code
Mar 23, 2022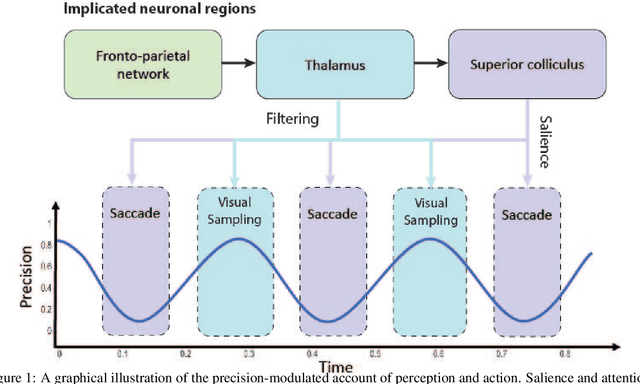
Computational models of visual attention in artificial intelligence and robotics have been inspired by the concept of a saliency map. These models account for the mutual information between the (current) visual information and its estimated causes. However, they fail to consider the circular causality between perception and action. In other words, they do not consider where to sample next, given current beliefs. Here, we reclaim salience as an active inference process that relies on two basic principles: uncertainty minimisation and rhythmic scheduling. For this, we make a distinction between attention and salience. Briefly, we associate attention with precision control, i.e., the confidence with which beliefs can be updated given sampled sensory data, and salience with uncertainty minimisation that underwrites the selection of future sensory data. Using this, we propose a new account of attention based on rhythmic precision-modulation and discuss its potential in robotics, providing numerical experiments that showcase advantages of precision-modulation for state and noise estimation, system identification and action selection for informative path planning.