 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFree Energy Principle for the Noise Smoothness Estimation of Linear Systems with Colored Noise
Paper and Code
Apr 04, 2022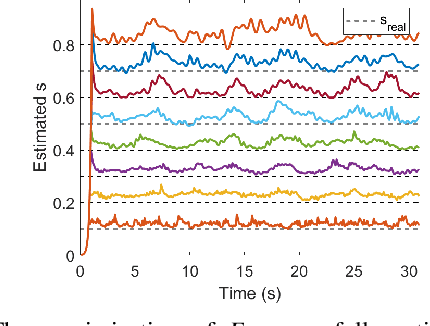
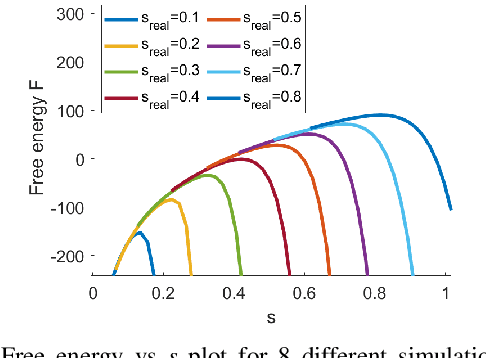
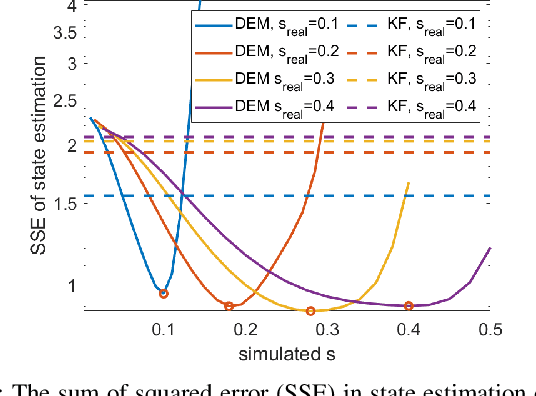
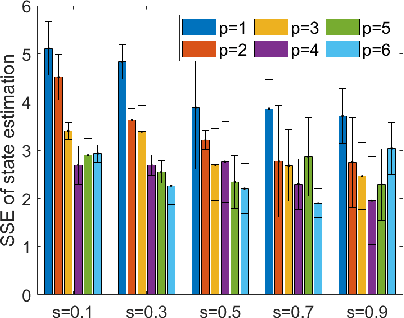
The free energy principle (FEP) from neuroscience provides a framework called active inference for the joint estimation and control of state space systems, subjected to colored noise. However, the active inference community has been challenged with the critical task of manually tuning the noise smoothness parameter. To solve this problem, we introduce a novel online noise smoothness estimator based on the idea of free energy principle. We mathematically show that our estimator can converge to the free energy optimum during smoothness estimation. Using this formulation, we introduce a joint state and noise smoothness observer design called DEMs. Through rigorous simulations, we show that DEMs outperforms state-of-the-art state observers with least state estimation error. Finally, we provide a proof of concept for DEMs by applying it on a real life robotics problem - state estimation of a quadrotor hovering in wind, demonstrating its practical use.