 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Trajectory Optimization and Power Control for Hierarchical UAV Swarms in 6G Aerial Access Network
Aug 26, 2025



Unmanned aerial vehicles (UAVs) can serve as aerial base stations (BSs) to extend the ubiquitous connectivity for ground users (GUs) in the sixth-generation (6G) era. However, it is challenging to cooperatively deploy multiple UAV swarms in large-scale remote areas. Hence, in this paper, we propose a hierarchical UAV swarms structure for 6G aerial access networks, where the head UAVs serve as aerial BSs, and tail UAVs (T-UAVs) are responsible for relay. In detail, we jointly optimize the dynamic deployment and trajectory of UAV swarms, which is formulated as a multi-objective optimization problem (MOP) to concurrently minimize the energy consumption of UAV swarms and GUs, as well as the delay of GUs. However, the proposed MOP is a mixed integer nonlinear programming and NP-hard to solve. Therefore, we develop a K-means and Voronoi diagram based area division method, and construct Fermat points to establish connections between GUs and T-UAVs. Then, an improved non-dominated sorting whale optimization algorithm is proposed to seek Pareto optimal solutions for the transformed MOP. Finally, extensive simulations are conducted to verify the performance of proposed algorithms by comparing with baseline mechanisms, resulting in a 50% complexity reduction.
Remote ID Based UAV Collision Avoidance Optimization for Low-Altitude Airspace Safety
Aug 11, 2025With the rapid development of unmanned aerial vehicles (UAVs), it is paramount to ensure safe and efficient operations in open airspaces. The remote identification (Remote ID) is deemed an effective real-time UAV monitoring system by the federal aviation administration, which holds potentials for enabling inter-UAV communications. This paper deeply investigates the application of Remote ID for UAV collision avoidance while minimizing communication delays. First, we propose a Remote ID based distributed multi-UAV collision avoidance (DMUCA) framework to support the collision detection, avoidance decision-making, and trajectory recovery. Next, the average transmission delays for Remote ID messages are analyzed, incorporating the packet reception mechanisms and packet loss due to interference. The optimization problem is formulated to minimize the long-term average communication delay, where UAVs can flexibly select the Remote ID protocol to enhance the collision avoidance performance. To tackle the problem, we design a multi-agent deep Q-network based adaptive communication configuration algorithm, allowing UAVs to autonomously learn the optimal protocol configurations in dynamic environments. Finally, numerical results verify the feasibility of the proposed DMUCA framework, and the proposed mechanism can reduce the average delay by 32% compared to the fixed protocol configuration.
Joint Computation Offloading and Resource Allocation for Uncertain Maritime MEC via Cooperation of UAVs and Vessels
Jun 18, 2025



The computation demands from the maritime Internet of Things (MIoT) increase rapidly in recent years, and the unmanned aerial vehicles (UAVs) and vessels based multi-access edge computing (MEC) can fulfill these MIoT requirements. However, the uncertain maritime tasks present significant challenges of inefficient computation offloading and resource allocation. In this paper, we focus on the maritime computation offloading and resource allocation through the cooperation of UAVs and vessels, with consideration of uncertain tasks. Specifically, we propose a cooperative MEC framework for computation offloading and resource allocation, including MIoT devices, UAVs and vessels. Then, we formulate the optimization problem to minimize the total execution time. As for the uncertain MIoT tasks, we leverage Lyapunov optimization to tackle the unpredictable task arrivals and varying computational resource availability. By converting the long-term constraints into short-term constraints, we obtain a set of small-scale optimization problems. Further, considering the heterogeneity of actions and resources of UAVs and vessels, we reformulate the small-scale optimization problem into a Markov game (MG). Moreover, a heterogeneous-agent soft actor-critic is proposed to sequentially update various neural networks and effectively solve the MG problem. Finally, simulations are conducted to verify the effectiveness in addressing computational offloading and resource allocation.
CNN+Transformer Based Anomaly Traffic Detection in UAV Networks for Emergency Rescue
Mar 26, 2025The unmanned aerial vehicle (UAV) network has gained significant attentions in recent years due to its various applications. However, the traffic security becomes the key threatening public safety issue in an emergency rescue system due to the increasing vulnerability of UAVs to cyber attacks in environments with high heterogeneities. Hence, in this paper, we propose a novel anomaly traffic detection architecture for UAV networks based on the software-defined networking (SDN) framework and blockchain technology. Specifically, SDN separates the control and data plane to enhance the network manageability and security. Meanwhile, the blockchain provides decentralized identity authentication and data security records. Beisdes, a complete security architecture requires an effective mechanism to detect the time-series based abnormal traffic. Thus, an integrated algorithm combining convolutional neural networks (CNNs) and Transformer (CNN+Transformer) for anomaly traffic detection is developed, which is called CTranATD. Finally, the simulation results show that the proposed CTranATD algorithm is effective and outperforms the individual CNN, Transformer, and LSTM algorithms for detecting anomaly traffic.
Joint ADS-B in B5G for Hierarchical UAV Networks: Performance Analysis and MEC Based Optimization
Mar 18, 2025Unmanned aerial vehicles (UAVs) play significant roles in multiple fields, which brings great challenges for the airspace safety. In order to achieve efficient surveillance and break the limitation of application scenarios caused by single communication, we propose the collaborative surveillance model for hierarchical UAVs based on the cooperation of automatic dependent surveillance-broadcast (ADS-B) and 5G. Specifically, UAVs are hierarchical deployed, with the low-altitude central UAV equipped with the 5G module, and the high-altitude central UAV with ADS-B, which helps automatically broadcast the flight information to surrounding aircraft and ground stations. Firstly, we build the framework, derive the analytic expression, and analyze the channel performance of both air-to-ground (A2G) and air-to-air (A2A). Then, since the redundancy or information loss during transmission aggravates the monitoring performance, the mobile edge computing (MEC) based on-board processing algorithm is proposed. Finally, the performances of the proposed model and algorithm are verified through both simulations and experiments. In detail, the redundant data filtered out by the proposed algorithm accounts for 53.48%, and the supplementary data accounts for 16.42% of the optimized data. This work designs a UAV monitoring framework and proposes an algorithm to enhance the observability of trajectory surveillance, which helps improve the airspace safety and enhance the air traffic flow management.
Generative AI-Enhanced Cooperative MEC of UAVs and Ground Stations for Unmanned Surface Vehicles
Feb 12, 2025The increasing deployment of unmanned surface vehicles (USVs) require computational support and coverage in applications such as maritime search and rescue. Unmanned aerial vehicles (UAVs) can offer low-cost, flexible aerial services, and ground stations (GSs) can provide powerful supports, which can cooperate to help the USVs in complex scenarios. However, the collaboration between UAVs and GSs for USVs faces challenges of task uncertainties, USVs trajectory uncertainties, heterogeneities, and limited computational resources. To address these issues, we propose a cooperative UAV and GS based robust multi-access edge computing framework to assist USVs in completing computational tasks. Specifically, we formulate the optimization problem of joint task offloading and UAV trajectory to minimize the total execution time, which is in the form of mixed integer nonlinear programming and NP-hard to tackle. Therefore, we propose the algorithm of generative artificial intelligence-enhanced heterogeneous agent proximal policy optimization (GAI-HAPPO). The proposed algorithm integrates GAI models to enhance the actor network ability to model complex environments and extract high-level features, thereby allowing the algorithm to predict uncertainties and adapt to dynamic conditions. Additionally, GAI stabilizes the critic network, addressing the instability of multi-agent reinforcement learning approaches. Finally, extensive simulations demonstrate that the proposed algorithm outperforms the existing benchmark methods, thus highlighting the potentials in tackling intricate, cross-domain issues in the considered scenarios.
Robust UAV Path Planning with Obstacle Avoidance for Emergency Rescue
Jan 16, 2025The unmanned aerial vehicles (UAVs) are efficient tools for diverse tasks such as electronic reconnaissance, agricultural operations and disaster relief. In the complex three-dimensional (3D) environments, the path planning with obstacle avoidance for UAVs is a significant issue for security assurance. In this paper, we construct a comprehensive 3D scenario with obstacles and no-fly zones for dynamic UAV trajectory. Moreover, a novel artificial potential field algorithm coupled with simulated annealing (APF-SA) is proposed to tackle the robust path planning problem. APF-SA modifies the attractive and repulsive potential functions and leverages simulated annealing to escape local minimum and converge to globally optimal solutions. Simulation results demonstrate that the effectiveness of APF-SA, enabling efficient autonomous path planning for UAVs with obstacle avoidance.
Interference Analysis for Coexistence of UAVs and Civil Aircrafts Based on Automatic Dependent Surveillance-Broadcast
Jun 12, 2024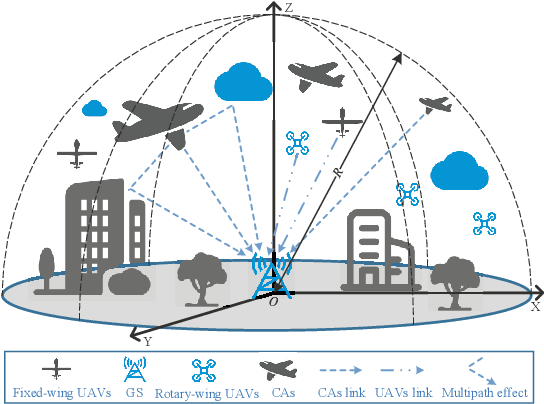
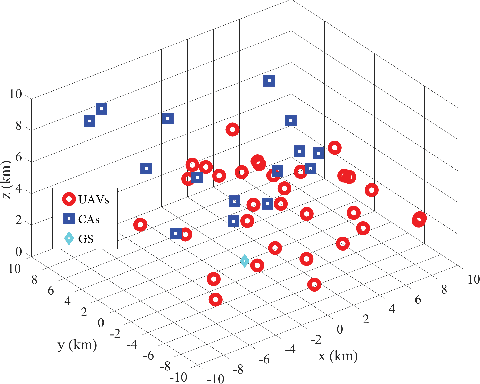
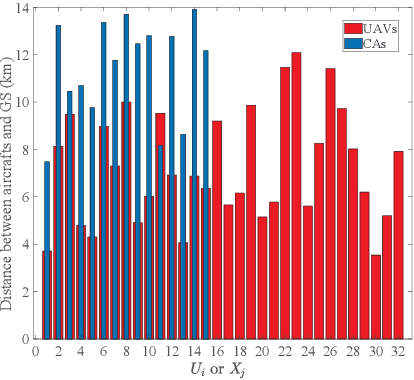
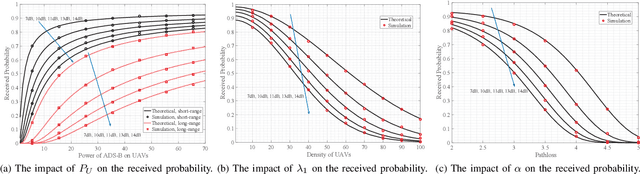
Due to the advantages of high mobility and easy deployment, unmanned aerial vehicles (UAVs) are widely applied in both military and civilian fields. In order to strengthen the flight surveillance of UAVs and guarantee the airspace safety, UAVs can be equipped with the automatic dependent surveillance-broadcast (ADS-B) system, which periodically sends flight information to other aircrafts and ground stations (GSs). However, due to the limited resource of channel capacity, UAVs equipped with ADS-B results in the interference between UAVs and civil aircrafts (CAs), which further impacts the accuracy of received information at GSs. In detail, the channel capacity is mainly affected by the density of aircrafts and the transmitting power of ADS-B. Hence, based on the three-dimensional poisson point process, this work leverages the stochastic geometry theory to build a model of the coexistence of UAVs and CAs and analyze the interference performance of ADS-B monitoring system. From simulation results, we reveal the effects of transmitting power, density, threshold and pathloss on the performance of the ADS-B monitoring system. Besides, we provide the suggested transmitting power and density for the safe coexistence of UAVs and CAs.
Cooperative Cognitive Dynamic System in UAV Swarms: Reconfigurable Mechanism and Framework
May 18, 2024As the demands for immediate and effective responses increase in both civilian and military domains, the unmanned aerial vehicle (UAV) swarms emerge as effective solutions, in which multiple cooperative UAVs can work together to achieve specific goals. However, how to manage such complex systems to ensure real-time adaptability lack sufficient researches. Hence, in this paper, we propose the cooperative cognitive dynamic system (CCDS), to optimize the management for UAV swarms. CCDS leverages a hierarchical and cooperative control structure that enables real-time data processing and decision. Accordingly, CCDS optimizes the UAV swarm management via dynamic reconfigurability and adaptive intelligent optimization. In addition, CCDS can be integrated with the biomimetic mechanism to efficiently allocate tasks for UAV swarms. Further, the distributed coordination of CCDS ensures reliable and resilient control, thus enhancing the adaptability and robustness. Finally, the potential challenges and future directions are analyzed, to provide insights into managing UAV swarms in dynamic heterogeneous networking.
Joint ADS-B in 5G for Hierarchical Aerial Networks: Performance Analysis and Optimization
Apr 29, 2024Unmanned aerial vehicles (UAVs) are widely applied in multiple fields, which emphasizes the challenge of obtaining UAV flight information to ensure the airspace safety. UAVs equipped with automatic dependent surveillance-broadcast (ADS-B) devices are capable of sending flight information to nearby aircrafts and ground stations (GSs). However, the saturation of limited frequency bands of ADS-B leads to interferences among UAVs and impairs the monitoring performance of GS to civil planes. To address this issue, the integration of the 5th generation mobile communication technology (5G) with ADS-B is proposed for UAV operations in this paper. Specifically, a hierarchical structure is proposed, in which the high-altitude central UAV is equipped with ADS-B and the low-altitude central UAV utilizes 5G modules to transmit flight information. Meanwhile, based on the mobile edge computing technique, the flight information of sub-UAVs is offloaded to the central UAV for further processing, and then transmitted to GS. We present the deterministic model and stochastic geometry based model to build the air-to-ground channel and air-to-air channel, respectively. The effectiveness of the proposed monitoring system is verified via simulations and experiments. This research contributes to improving the airspace safety and advancing the air traffic flow management.