 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust UAV Path Planning with Obstacle Avoidance for Emergency Rescue
Jan 16, 2025The unmanned aerial vehicles (UAVs) are efficient tools for diverse tasks such as electronic reconnaissance, agricultural operations and disaster relief. In the complex three-dimensional (3D) environments, the path planning with obstacle avoidance for UAVs is a significant issue for security assurance. In this paper, we construct a comprehensive 3D scenario with obstacles and no-fly zones for dynamic UAV trajectory. Moreover, a novel artificial potential field algorithm coupled with simulated annealing (APF-SA) is proposed to tackle the robust path planning problem. APF-SA modifies the attractive and repulsive potential functions and leverages simulated annealing to escape local minimum and converge to globally optimal solutions. Simulation results demonstrate that the effectiveness of APF-SA, enabling efficient autonomous path planning for UAVs with obstacle avoidance.
Globally optimal point set registration by joint symmetry plane fitting
Feb 19, 2020
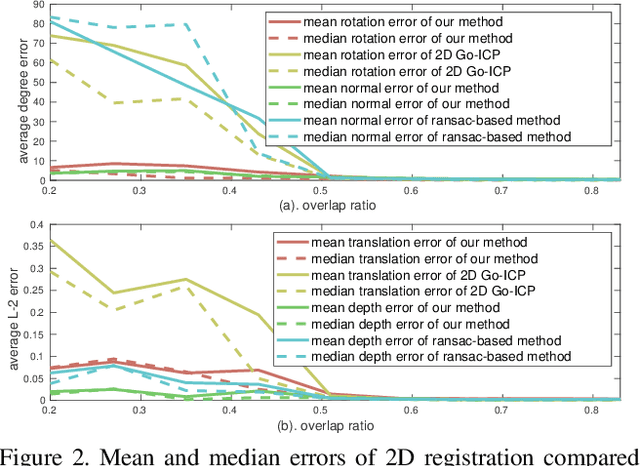
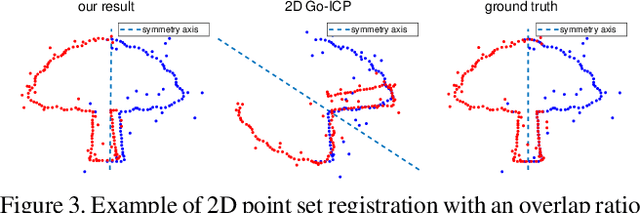
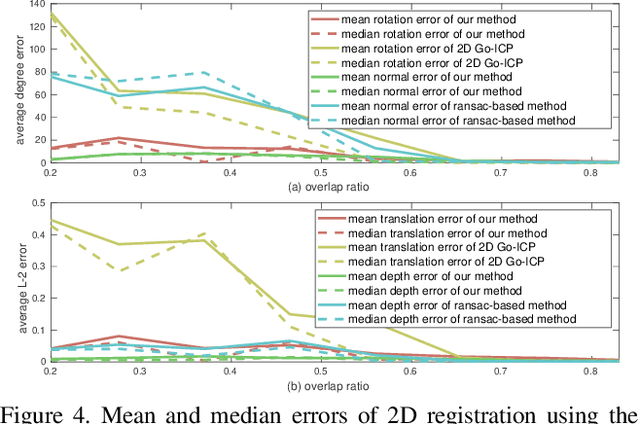
The present work proposes a solution to the challenging problem of registering two partial point sets of the same object with very limited overlap. We leverage the fact that most objects found in man-made environments contain a plane of symmetry. By reflecting the points of each set with respect to the plane of symmetry, we can largely increase the overlap between the sets and therefore boost the registration process. However, prior knowledge about the plane of symmetry is generally unavailable or at least very hard to find, especially with limited partial views, and finding this plane could strongly benefit from a prior alignment of the partial point sets. We solve this chicken-and-egg problem by jointly optimizing the relative pose and symmetry plane parameters, and notably do so under global optimality by employing the branch-and-bound (BnB) paradigm. Our results demonstrate a great improvement over the current state-of-the-art in globally optimal point set registration for common objects. We furthermore show an interesting application of our method to dense 3D reconstruction of scenes with repetitive objects.