 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSteering and Rectifying Latent Representation Manifolds in Frozen Multi-modal LLMs for Video Anomaly Detection
Feb 27, 2026Video anomaly detection (VAD) aims to identify abnormal events in videos. Traditional VAD methods generally suffer from the high costs of labeled data and full training, thus some recent works have explored leveraging frozen multi-modal large language models (MLLMs) in a tuning-free manner to perform VAD. However, their performance is limited as they directly inherit pre-training biases and cannot adapt internal representations to specific video contexts, leading to difficulties in handling subtle or ambiguous anomalies. To address these limitations, we propose a novel intervention framework, termed SteerVAD, which advances MLLM-based VAD by shifting from passively reading to actively steering and rectifying internal representations. Our approach first leverages the gradient-free representational separability analysis (RSA) to identify top attention heads as latent anomaly experts (LAEs) which are most discriminative for VAD. Then a hierarchical meta-controller (HMC) generates dynamic rectification signals by jointly conditioning on global context and these LAE outputs. The signals execute targeted, anisotropic scaling directly upon the LAE representation manifolds, amplifying anomaly-relevant dimensions while suppressing inherent biases. Extensive experiments on mainstream benchmarks demonstrate our method achieves state-of-the-art performance among tuning-free approaches requiring only 1% of training data, establishing it as a powerful new direction for video anomaly detection. The code will be released upon the publication.
Enhancing Foundation VLM Robustness to Missing Modality: Scalable Diffusion for Bi-directional Feature Restoration
Feb 03, 2026Vision Language Models (VLMs) typically assume complete modality input during inference. However, their effectiveness drops sharply when certain modalities are unavailable or incomplete. Current research primarily faces two dilemmas: Prompt-based methods struggle to restore missing yet indispensable features and impair generalization of VLMs. Imputation-based approaches, lacking effective guidance, are prone to generating semantically irrelevant noise. Restoring precise semantics while sustaining VLM generalization remains challenging. Therefore, we propose a general missing modality restoration strategy in this paper. We introduce an enhanced diffusion model as a pluggable mid-stage training module to effectively restore missing features. Our strategy introduces two key innovations: (I) Dynamic Modality Gating, which adaptively leverages conditional features to steer the generation of semantically consistent features; (II) Cross-Modal Mutual Learning mechanism, which bridges the semantic spaces of dual encoders to achieve bidirectional alignment. Zero-shot evaluations across benchmark datasets demonstrate that our approach outperforms existing baseline methods. Extensive experiments and ablation studies confirm our model as a robust and scalable extension for VLMs in missing modality scenarios, ensuring reliability across diverse missing rates and environments. Our code and models will be publicly available.
HeadHunt-VAD: Hunting Robust Anomaly-Sensitive Heads in MLLM for Tuning-Free Video Anomaly Detection
Dec 23, 2025
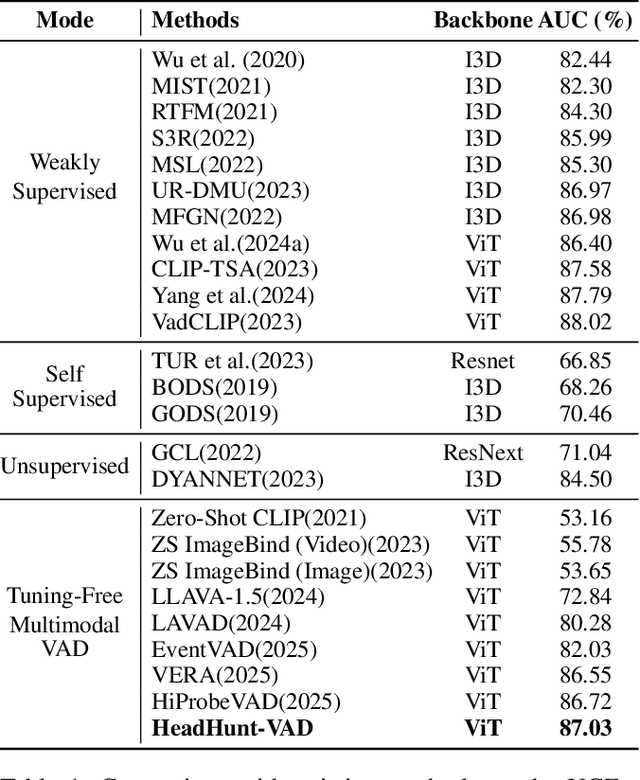
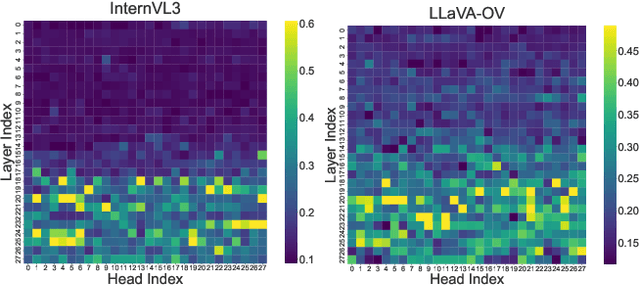
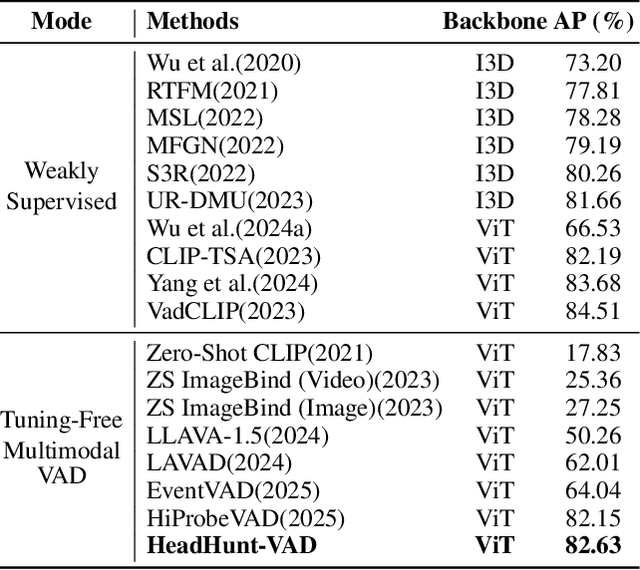
Video Anomaly Detection (VAD) aims to locate events that deviate from normal patterns in videos. Traditional approaches often rely on extensive labeled data and incur high computational costs. Recent tuning-free methods based on Multimodal Large Language Models (MLLMs) offer a promising alternative by leveraging their rich world knowledge. However, these methods typically rely on textual outputs, which introduces information loss, exhibits normalcy bias, and suffers from prompt sensitivity, making them insufficient for capturing subtle anomalous cues. To address these constraints, we propose HeadHunt-VAD, a novel tuning-free VAD paradigm that bypasses textual generation by directly hunting robust anomaly-sensitive internal attention heads within the frozen MLLM. Central to our method is a Robust Head Identification module that systematically evaluates all attention heads using a multi-criteria analysis of saliency and stability, identifying a sparse subset of heads that are consistently discriminative across diverse prompts. Features from these expert heads are then fed into a lightweight anomaly scorer and a temporal locator, enabling efficient and accurate anomaly detection with interpretable outputs. Extensive experiments show that HeadHunt-VAD achieves state-of-the-art performance among tuning-free methods on two major VAD benchmarks while maintaining high efficiency, validating head-level probing in MLLMs as a powerful and practical solution for real-world anomaly detection.
What Your Features Reveal: Data-Efficient Black-Box Feature Inversion Attack for Split DNNs
Nov 19, 2025Split DNNs enable edge devices by offloading intensive computation to a cloud server, but this paradigm exposes privacy vulnerabilities, as the intermediate features can be exploited to reconstruct the private inputs via Feature Inversion Attack (FIA). Existing FIA methods often produce limited reconstruction quality, making it difficult to assess the true extent of privacy leakage. To reveal the privacy risk of the leaked features, we introduce FIA-Flow, a black-box FIA framework that achieves high-fidelity image reconstruction from intermediate features. To exploit the semantic information within intermediate features, we design a Latent Feature Space Alignment Module (LFSAM) to bridge the semantic gap between the intermediate feature space and the latent space. Furthermore, to rectify distributional mismatch, we develop Deterministic Inversion Flow Matching (DIFM), which projects off-manifold features onto the target manifold with one-step inference. This decoupled design simplifies learning and enables effective training with few image-feature pairs. To quantify privacy leakage from a human perspective, we also propose two metrics based on a large vision-language model. Experiments show that FIA-Flow achieves more faithful and semantically aligned feature inversion across various models (AlexNet, ResNet, Swin Transformer, DINO, and YOLO11) and layers, revealing a more severe privacy threat in Split DNNs than previously recognized.
Invisible Triggers, Visible Threats! Road-Style Adversarial Creation Attack for Visual 3D Detection in Autonomous Driving
Nov 14, 2025Modern autonomous driving (AD) systems leverage 3D object detection to perceive foreground objects in 3D environments for subsequent prediction and planning. Visual 3D detection based on RGB cameras provides a cost-effective solution compared to the LiDAR paradigm. While achieving promising detection accuracy, current deep neural network-based models remain highly susceptible to adversarial examples. The underlying safety concerns motivate us to investigate realistic adversarial attacks in AD scenarios. Previous work has demonstrated the feasibility of placing adversarial posters on the road surface to induce hallucinations in the detector. However, the unnatural appearance of the posters makes them easily noticeable by humans, and their fixed content can be readily targeted and defended. To address these limitations, we propose the AdvRoad to generate diverse road-style adversarial posters. The adversaries have naturalistic appearances resembling the road surface while compromising the detector to perceive non-existent objects at the attack locations. We employ a two-stage approach, termed Road-Style Adversary Generation and Scenario-Associated Adaptation, to maximize the attack effectiveness on the input scene while ensuring the natural appearance of the poster, allowing the attack to be carried out stealthily without drawing human attention. Extensive experiments show that AdvRoad generalizes well to different detectors, scenes, and spoofing locations. Moreover, physical attacks further demonstrate the practical threats in real-world environments.
Learning Fourier shapes to probe the geometric world of deep neural networks
Nov 07, 2025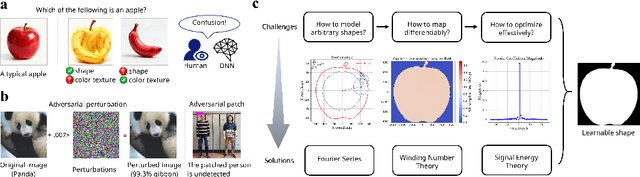
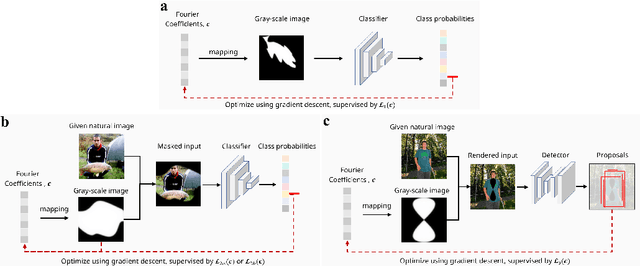
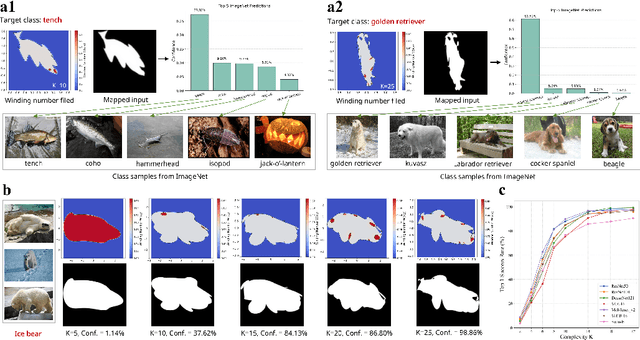
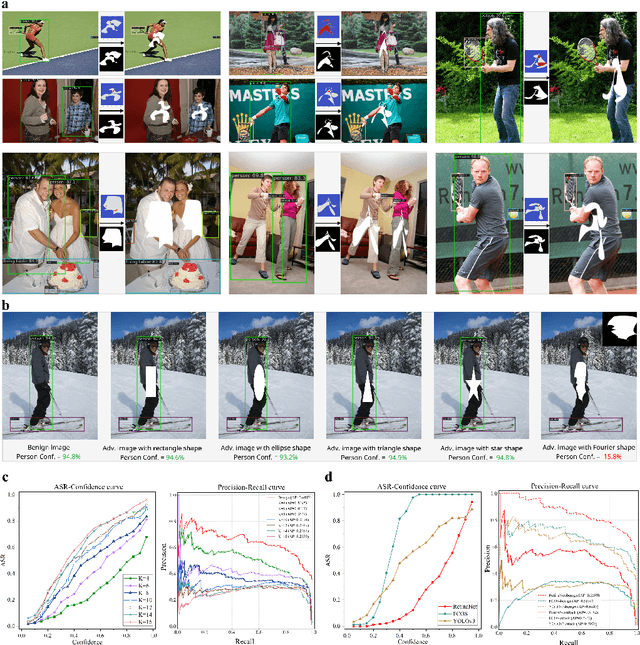
While both shape and texture are fundamental to visual recognition, research on deep neural networks (DNNs) has predominantly focused on the latter, leaving their geometric understanding poorly probed. Here, we show: first, that optimized shapes can act as potent semantic carriers, generating high-confidence classifications from inputs defined purely by their geometry; second, that they are high-fidelity interpretability tools that precisely isolate a model's salient regions; and third, that they constitute a new, generalizable adversarial paradigm capable of deceiving downstream visual tasks. This is achieved through an end-to-end differentiable framework that unifies a powerful Fourier series to parameterize arbitrary shapes, a winding number-based mapping to translate them into the pixel grid required by DNNs, and signal energy constraints that enhance optimization efficiency while ensuring physically plausible shapes. Our work provides a versatile framework for probing the geometric world of DNNs and opens new frontiers for challenging and understanding machine perception.
Dynamic Trajectory Optimization and Power Control for Hierarchical UAV Swarms in 6G Aerial Access Network
Aug 26, 2025



Unmanned aerial vehicles (UAVs) can serve as aerial base stations (BSs) to extend the ubiquitous connectivity for ground users (GUs) in the sixth-generation (6G) era. However, it is challenging to cooperatively deploy multiple UAV swarms in large-scale remote areas. Hence, in this paper, we propose a hierarchical UAV swarms structure for 6G aerial access networks, where the head UAVs serve as aerial BSs, and tail UAVs (T-UAVs) are responsible for relay. In detail, we jointly optimize the dynamic deployment and trajectory of UAV swarms, which is formulated as a multi-objective optimization problem (MOP) to concurrently minimize the energy consumption of UAV swarms and GUs, as well as the delay of GUs. However, the proposed MOP is a mixed integer nonlinear programming and NP-hard to solve. Therefore, we develop a K-means and Voronoi diagram based area division method, and construct Fermat points to establish connections between GUs and T-UAVs. Then, an improved non-dominated sorting whale optimization algorithm is proposed to seek Pareto optimal solutions for the transformed MOP. Finally, extensive simulations are conducted to verify the performance of proposed algorithms by comparing with baseline mechanisms, resulting in a 50% complexity reduction.
Dependency Structure Augmented Contextual Scoping Framework for Multimodal Aspect-Based Sentiment Analysis
Apr 15, 2025Multimodal Aspect-Based Sentiment Analysis (MABSA) seeks to extract fine-grained information from image-text pairs to identify aspect terms and determine their sentiment polarity. However, existing approaches often fall short in simultaneously addressing three core challenges: Sentiment Cue Perception (SCP), Multimodal Information Misalignment (MIM), and Semantic Noise Elimination (SNE). To overcome these limitations, we propose DASCO (\textbf{D}ependency Structure \textbf{A}ugmented \textbf{Sco}ping Framework), a fine-grained scope-oriented framework that enhances aspect-level sentiment reasoning by leveraging dependency parsing trees. First, we designed a multi-task pretraining strategy for MABSA on our base model, combining aspect-oriented enhancement, image-text matching, and aspect-level sentiment-sensitive cognition. This improved the model's perception of aspect terms and sentiment cues while achieving effective image-text alignment, addressing key challenges like SCP and MIM. Furthermore, we incorporate dependency trees as syntactic branch combining with semantic branch, guiding the model to selectively attend to critical contextual elements within a target-specific scope while effectively filtering out irrelevant noise for addressing SNE problem. Extensive experiments on two benchmark datasets across three subtasks demonstrate that DASCO achieves state-of-the-art performance in MABSA, with notable gains in JMASA (+3.1\% F1 and +5.4\% precision on Twitter2015).
Robust UAV Path Planning with Obstacle Avoidance for Emergency Rescue
Jan 16, 2025The unmanned aerial vehicles (UAVs) are efficient tools for diverse tasks such as electronic reconnaissance, agricultural operations and disaster relief. In the complex three-dimensional (3D) environments, the path planning with obstacle avoidance for UAVs is a significant issue for security assurance. In this paper, we construct a comprehensive 3D scenario with obstacles and no-fly zones for dynamic UAV trajectory. Moreover, a novel artificial potential field algorithm coupled with simulated annealing (APF-SA) is proposed to tackle the robust path planning problem. APF-SA modifies the attractive and repulsive potential functions and leverages simulated annealing to escape local minimum and converge to globally optimal solutions. Simulation results demonstrate that the effectiveness of APF-SA, enabling efficient autonomous path planning for UAVs with obstacle avoidance.
Spot Risks Before Speaking! Unraveling Safety Attention Heads in Large Vision-Language Models
Jan 03, 2025



With the integration of an additional modality, large vision-language models (LVLMs) exhibit greater vulnerability to safety risks (e.g., jailbreaking) compared to their language-only predecessors. Although recent studies have devoted considerable effort to the post-hoc alignment of LVLMs, the inner safety mechanisms remain largely unexplored. In this paper, we discover that internal activations of LVLMs during the first token generation can effectively identify malicious prompts across different attacks. This inherent safety perception is governed by sparse attention heads, which we term ``safety heads." Further analysis reveals that these heads act as specialized shields against malicious prompts; ablating them leads to higher attack success rates, while the model's utility remains unaffected. By locating these safety heads and concatenating their activations, we construct a straightforward but powerful malicious prompt detector that integrates seamlessly into the generation process with minimal extra inference overhead. Despite its simple structure of a logistic regression model, the detector surprisingly exhibits strong zero-shot generalization capabilities. Experiments across various prompt-based attacks confirm the effectiveness of leveraging safety heads to protect LVLMs. Code is available at \url{https://github.com/Ziwei-Zheng/SAHs}.