 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRevenue and Energy Efficiency-Driven Delay Constrained Computing Task Offloading and Resource Allocation in a Vehicular Edge Computing Network: A Deep Reinforcement Learning Approach
Paper and Code
Oct 16, 2020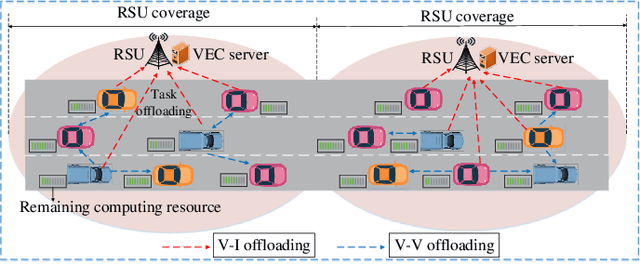
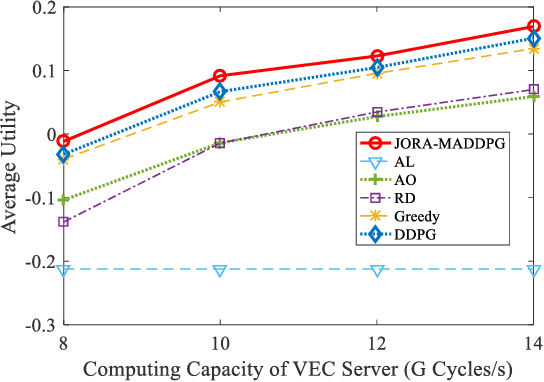
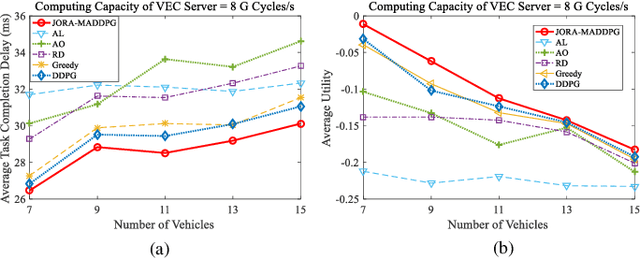
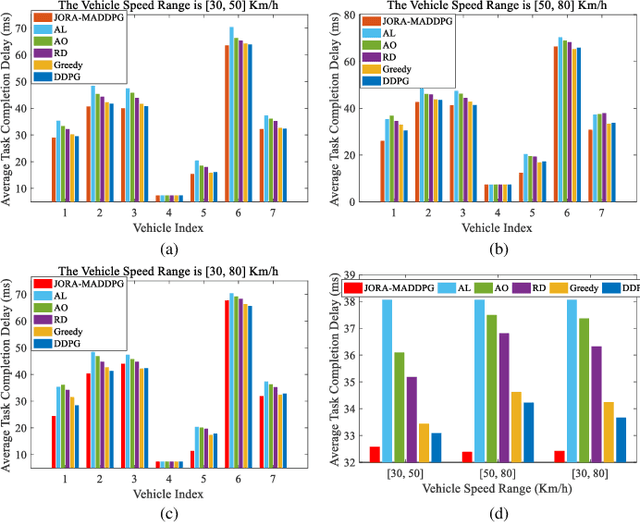
For in-vehicle application,task type and vehicle state information, i.e., vehicle speed, bear a significant impact on the task delay requirement. However, the joint impact of task type and vehicle speed on the task delay constraint has not been studied, and this lack of study may cause a mismatch between the requirement of the task delay and allocated computation and wireless resources. In this paper, we propose a joint task type and vehicle speed-aware task offloading and resource allocation strategy to decrease the vehicl's energy cost for executing tasks and increase the revenue of the vehicle for processing tasks within the delay constraint. First, we establish the joint task type and vehicle speed-aware delay constraint model. Then, the delay, energy cost and revenue for task execution in the vehicular edge computing (VEC) server, local terminal and terminals of other vehicles are calculated. Based on the energy cost and revenue from task execution,the utility function of the vehicle is acquired. Next, we formulate a joint optimization of task offloading and resource allocation to maximize the utility level of the vehicles subject to the constraints of task delay, computation resources and wireless resources. To obtain a near-optimal solution of the formulated problem, a joint offloading and resource allocation based on the multi-agent deep deterministic policy gradient (JORA-MADDPG) algorithm is proposed to maximize the utility level of vehicles. Simulation results show that our algorithm can achieve superior performance in task completion delay, vehicles' energy cost and processing revenue.