 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic-Rearrangement-Based Multi-Level Alignment for Domain Generalized Segmentation
Apr 21, 2024



Domain generalized semantic segmentation is an essential computer vision task, for which models only leverage source data to learn the capability of generalized semantic segmentation towards the unseen target domains. Previous works typically address this challenge by global style randomization or feature regularization. In this paper, we argue that given the observation that different local semantic regions perform different visual characteristics from the source domain to the target domain, methods focusing on global operations are hard to capture such regional discrepancies, thus failing to construct domain-invariant representations with the consistency from local to global level. Therefore, we propose the Semantic-Rearrangement-based Multi-Level Alignment (SRMA) to overcome this problem. SRMA first incorporates a Semantic Rearrangement Module (SRM), which conducts semantic region randomization to enhance the diversity of the source domain sufficiently. A Multi-Level Alignment module (MLA) is subsequently proposed with the help of such diversity to establish the global-regional-local consistent domain-invariant representations. By aligning features across randomized samples with domain-neutral knowledge at multiple levels, SRMA provides a more robust way to handle the source-target domain gap. Extensive experiments demonstrate the superiority of SRMA over the current state-of-the-art works on various benchmarks.
UAV Swarm Deployment and Trajectory for 3D Area Coverage via Reinforcement Learning
Sep 21, 2023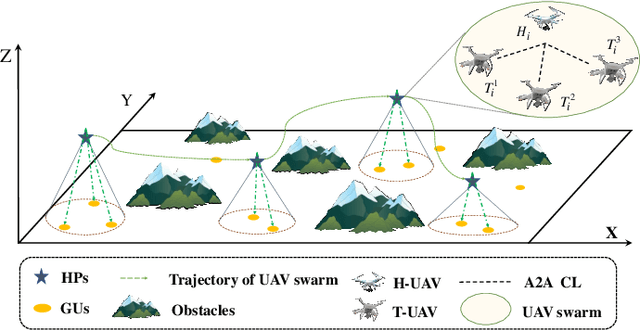
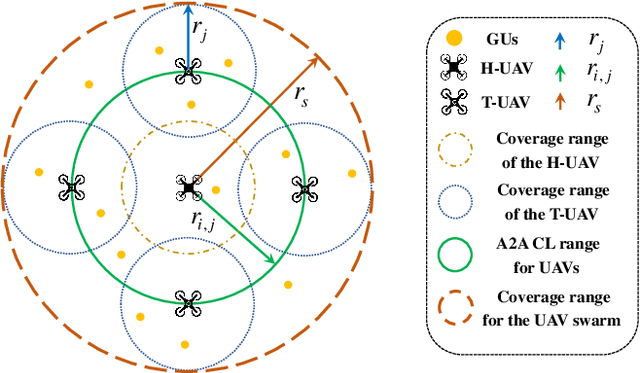
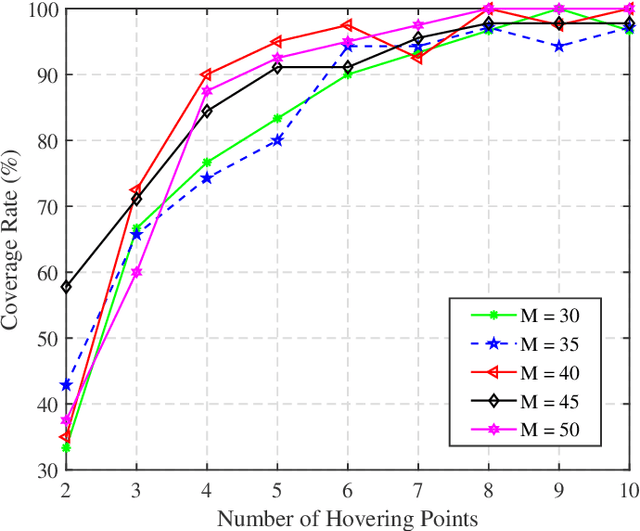
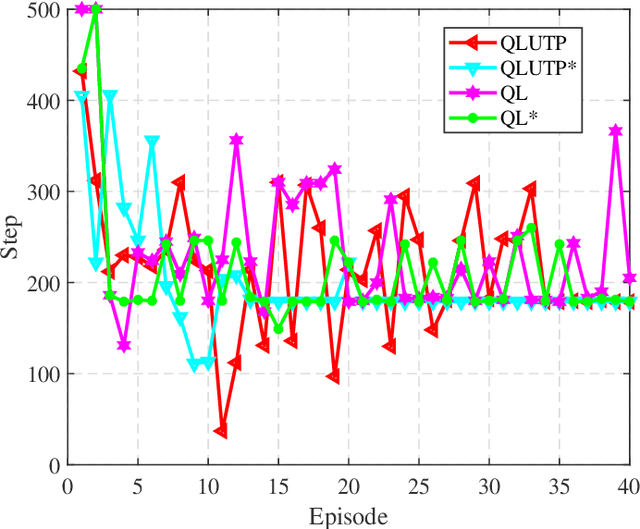
Unmanned aerial vehicles (UAVs) are recognized as promising technologies for area coverage due to the flexibility and adaptability. However, the ability of a single UAV is limited, and as for the large-scale three-dimensional (3D) scenario, UAV swarms can establish seamless wireless communication services. Hence, in this work, we consider a scenario of UAV swarm deployment and trajectory to satisfy 3D coverage considering the effects of obstacles. In detail, we propose a hierarchical swarm framework to efficiently serve the large-area users. Then, the problem is formulated to minimize the total trajectory loss of the UAV swarm. However, the problem is intractable due to the non-convex property, and we decompose it into smaller issues of users clustering, UAV swarm hovering points selection, and swarm trajectory determination. Moreover, we design a Q-learning based algorithm to accelerate the solution efficiency. Finally, we conduct extensive simulations to verify the proposed mechanisms, and the designed algorithm outperforms other referred methods.
Similarity Grouping-Guided Neural Network Modeling for Maritime Time Series Prediction
May 13, 2019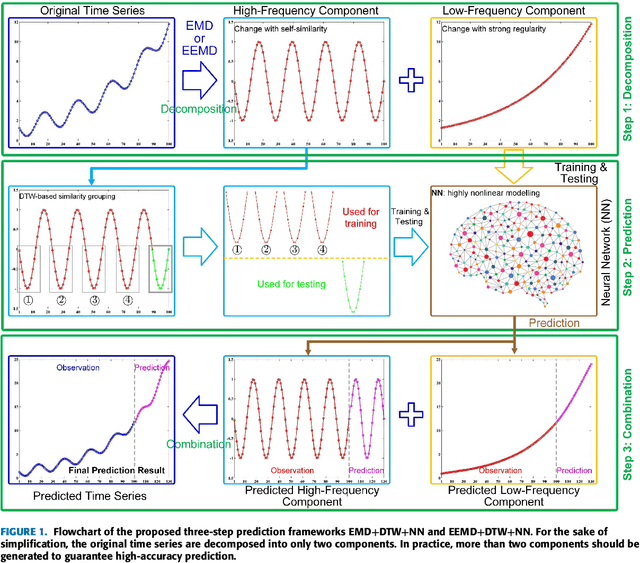


Reliable and accurate prediction of time series plays a crucial role in maritime industry, such as economic investment, transportation planning, port planning and design, etc. The dynamic growth of maritime time series has the predominantly complex, nonlinear and non-stationary properties. To guarantee high-quality prediction performance, we propose to first adopt the empirical mode decomposition (EMD) and ensemble EMD (EEMD) methods to decompose the original time series into high- and low-frequency components. The low-frequency components can be easily predicted directly through traditional neural network (NN) methods. It is more difficult to predict high-frequency components due to their properties of weak mathematical regularity. To take advantage of the inherent self-similarities within high-frequency components, these components will be divided into several continuous small (overlapping) segments. The grouped segments with high similarities are then selected to form more proper training datasets for traditional NN methods. This regrouping strategy can assist in enhancing the prediction accuracy of high-frequency components. The final prediction result is obtained by integrating the predicted high- and low-frequency components. Our proposed three-step prediction frameworks benefit from the time series decomposition and similar segments grouping. Experiments on both port cargo throughput and vessel traffic flow have illustrated its superior performance in terms of prediction accuracy and robustness.