 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDROID-SLAM in the Wild
Mar 19, 2026We present a robust, real-time RGB SLAM system that handles dynamic environments by leveraging differentiable Uncertainty-aware Bundle Adjustment. Traditional SLAM methods typically assume static scenes, leading to tracking failures in the presence of motion. Recent dynamic SLAM approaches attempt to address this challenge using predefined dynamic priors or uncertainty-aware mapping, but they remain limited when confronted with unknown dynamic objects or highly cluttered scenes where geometric mapping becomes unreliable. In contrast, our method estimates per-pixel uncertainty by exploiting multi-view visual feature inconsistency, enabling robust tracking and reconstruction even in real-world environments. The proposed system achieves state-of-the-art camera poses and scene geometry in cluttered dynamic scenarios while running in real time at around 10 FPS. Code and datasets are available at https://github.com/MoyangLi00/DROID-W.git.
Interactive Benchmarks
Mar 05, 2026Standard benchmarks have become increasingly unreliable due to saturation, subjectivity, and poor generalization. We argue that evaluating model's ability to acquire information actively is important to assess model's intelligence. We propose Interactive Benchmarks, a unified evaluation paradigm that assesses model's reasoning ability in an interactive process under budget constraints. We instantiate this framework across two settings: Interactive Proofs, where models interact with a judge to deduce objective truths or answers in logic and mathematics; and Interactive Games, where models reason strategically to maximize long-horizon utilities. Our results show that interactive benchmarks provide a robust and faithful assessment of model intelligence, revealing that there is still substantial room to improve in interactive scenarios. Project page: https://github.com/interactivebench/interactivebench
Fault-Tolerant Evaluation for Sample-Efficient Model Performance Estimators
Feb 06, 2026In the era of Model-as-a-Service, organizations increasingly rely on third-party AI models for rapid deployment. However, the dynamic nature of emerging AI applications, the continual introduction of new datasets, and the growing number of models claiming superior performance make efficient and reliable validation of model services increasingly challenging. This motivates the development of sample-efficient performance estimators, which aim to estimate model performance by strategically selecting instances for labeling, thereby reducing annotation cost. Yet existing evaluation approaches often fail in low-variance settings: RMSE conflates bias and variance, masking persistent bias when variance is small, while p-value based tests become hypersensitive, rejecting adequate estimators for negligible deviations. To address this, we propose a fault-tolerant evaluation framework that integrates bias and variance considerations within an adjustable tolerance level ${\varepsilon}$, enabling the evaluation of performance estimators within practically acceptable error margins. We theoretically show that proper calibration of ${\varepsilon}$ ensures reliable evaluation across different variance regimes, and we further propose an algorithm that automatically optimizes and selects ${\varepsilon}$. Experiments on real-world datasets demonstrate that our framework provides comprehensive and actionable insights into estimator behavior.
Decoding Rewards in Competitive Games: Inverse Game Theory with Entropy Regularization
Jan 19, 2026Estimating the unknown reward functions driving agents' behaviors is of central interest in inverse reinforcement learning and game theory. To tackle this problem, we develop a unified framework for reward function recovery in two-player zero-sum matrix games and Markov games with entropy regularization, where we aim to reconstruct the underlying reward functions given observed players' strategies and actions. This task is challenging due to the inherent ambiguity of inverse problems, the non-uniqueness of feasible rewards, and limited observational data coverage. To address these challenges, we establish the reward function's identifiability using the quantal response equilibrium (QRE) under linear assumptions. Building upon this theoretical foundation, we propose a novel algorithm to learn reward functions from observed actions. Our algorithm works in both static and dynamic settings and is adaptable to incorporate different methods, such as Maximum Likelihood Estimation (MLE). We provide strong theoretical guarantees for the reliability and sample efficiency of our algorithm. Further, we conduct extensive numerical studies to demonstrate the practical effectiveness of the proposed framework, offering new insights into decision-making in competitive environments.
Statistical Inference for Fuzzy Clustering
Jan 06, 2026Clustering is a central tool in biomedical research for discovering heterogeneous patient subpopulations, where group boundaries are often diffuse rather than sharply separated. Traditional methods produce hard partitions, whereas soft clustering methods such as fuzzy $c$-means (FCM) allow mixed memberships and better capture uncertainty and gradual transitions. Despite the widespread use of FCM, principled statistical inference for fuzzy clustering remains limited. We develop a new framework for weighted fuzzy $c$-means (WFCM) for settings with potential cluster size imbalance. Cluster-specific weights rebalance the classical FCM criterion so that smaller clusters are not overwhelmed by dominant groups, and the weighted objective induces a normalized density model with scale parameter $σ$ and fuzziness parameter $m$. Estimation is performed via a blockwise majorize--minimize (MM) procedure that alternates closed-form membership and centroid updates with likelihood-based updates of $(σ,\bw)$. The intractable normalizing constant is approximated by importance sampling using a data-adaptive Gaussian mixture proposal. We further provide likelihood ratio tests for comparing cluster centers and bootstrap-based confidence intervals. We establish consistency and asymptotic normality of the maximum likelihood estimator, validate the method through simulations, and illustrate it using single-cell RNA-seq and Alzheimer disease Neuroimaging Initiative (ADNI) data. These applications demonstrate stable uncertainty quantification and biologically meaningful soft memberships, ranging from well-separated cell populations under imbalance to a graded AD versus non-AD continuum consistent with disease progression.
MCGS-SLAM: A Multi-Camera SLAM Framework Using Gaussian Splatting for High-Fidelity Mapping
Sep 17, 2025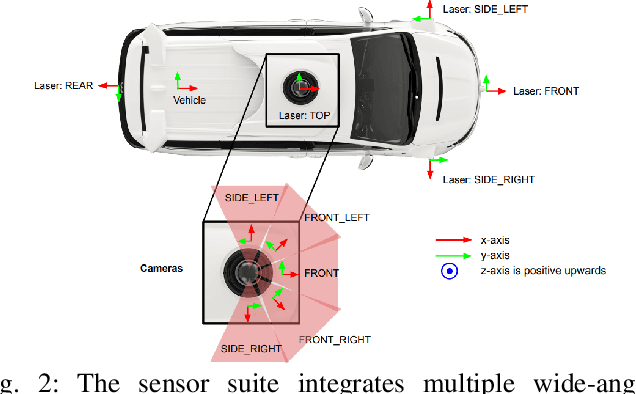
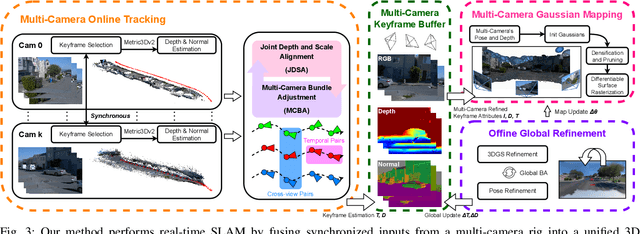
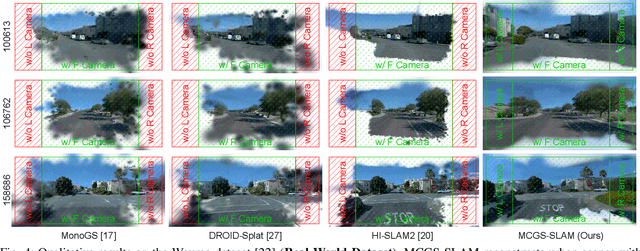
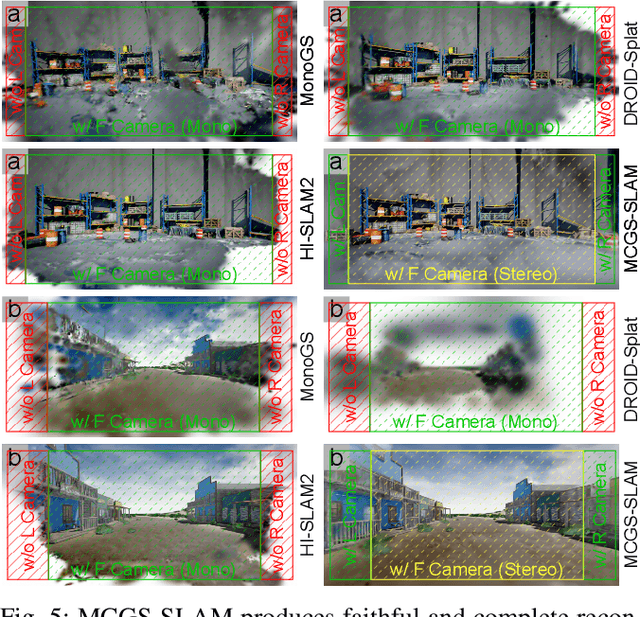
Recent progress in dense SLAM has primarily targeted monocular setups, often at the expense of robustness and geometric coverage. We present MCGS-SLAM, the first purely RGB-based multi-camera SLAM system built on 3D Gaussian Splatting (3DGS). Unlike prior methods relying on sparse maps or inertial data, MCGS-SLAM fuses dense RGB inputs from multiple viewpoints into a unified, continuously optimized Gaussian map. A multi-camera bundle adjustment (MCBA) jointly refines poses and depths via dense photometric and geometric residuals, while a scale consistency module enforces metric alignment across views using low-rank priors. The system supports RGB input and maintains real-time performance at large scale. Experiments on synthetic and real-world datasets show that MCGS-SLAM consistently yields accurate trajectories and photorealistic reconstructions, usually outperforming monocular baselines. Notably, the wide field of view from multi-camera input enables reconstruction of side-view regions that monocular setups miss, critical for safe autonomous operation. These results highlight the promise of multi-camera Gaussian Splatting SLAM for high-fidelity mapping in robotics and autonomous driving.
WildGS-SLAM: Monocular Gaussian Splatting SLAM in Dynamic Environments
Apr 04, 2025We present WildGS-SLAM, a robust and efficient monocular RGB SLAM system designed to handle dynamic environments by leveraging uncertainty-aware geometric mapping. Unlike traditional SLAM systems, which assume static scenes, our approach integrates depth and uncertainty information to enhance tracking, mapping, and rendering performance in the presence of moving objects. We introduce an uncertainty map, predicted by a shallow multi-layer perceptron and DINOv2 features, to guide dynamic object removal during both tracking and mapping. This uncertainty map enhances dense bundle adjustment and Gaussian map optimization, improving reconstruction accuracy. Our system is evaluated on multiple datasets and demonstrates artifact-free view synthesis. Results showcase WildGS-SLAM's superior performance in dynamic environments compared to state-of-the-art methods.
False Discovery Rate Control via Frequentist-assisted Horseshoe
Feb 08, 2025The horseshoe prior, a widely used handy alternative to the spike-and-slab prior, has proven to be an exceptional default global-local shrinkage prior in Bayesian inference and machine learning. However, designing tests with frequentist false discovery rate (FDR) control using the horseshoe prior or the general class of global-local shrinkage priors remains an open problem. In this paper, we propose a frequentist-assisted horseshoe procedure that not only resolves this long-standing FDR control issue for the high dimensional normal means testing problem but also exhibits satisfactory finite-sample FDR control under any desired nominal level for both large-scale multiple independent and correlated tests. We carry out the frequentist-assisted horseshoe procedure in an easy and intuitive way by using the minimax estimator of the global parameter of the horseshoe prior while maintaining the remaining full Bayes vanilla horseshoe structure. The results of both intensive simulations under different sparsity levels, and real-world data demonstrate that the frequentist-assisted horseshoe procedure consistently achieves robust finite-sample FDR control. Existing frequentist or Bayesian FDR control procedures can lose finite-sample FDR control in a variety of common sparse cases. Based on the intimate relationship between the minimax estimation and the level of FDR control discovered in this work, we point out potential generalizations to achieve FDR control for both more complicated models and the general global-local shrinkage prior family.
ProcTex: Consistent and Interactive Text-to-texture Synthesis for Procedural Models
Jan 28, 2025



Recent advancement in 2D image diffusion models has driven significant progress in text-guided texture synthesis, enabling realistic, high-quality texture generation from arbitrary text prompts. However, current methods usually focus on synthesizing texture for single static 3D objects, and struggle to handle entire families of shapes, such as those produced by procedural programs. Applying existing methods naively to each procedural shape is too slow to support exploring different parameter settings at interactive rates, and also results in inconsistent textures across the procedural shapes. To this end, we introduce ProcTex, the first text-to-texture system designed for procedural 3D models. ProcTex enables consistent and real-time text-guided texture synthesis for families of shapes, which integrates seamlessly with the interactive design flow of procedural models. To ensure consistency, our core approach is to generate texture for the shape produced by one setting of the procedural parameters, followed by a texture transfer stage to apply the texture to other parameter settings. We also develop several techniques, including a novel UV displacement network for real-time texture transfer, the retexturing pipeline to support structural changes from discrete procedural parameters, and part-level UV texture map generation for local appearance editing. Extensive experiments on a diverse set of professional procedural models validate ProcTex's ability to produce high-quality, visually consistent textures while supporting real-time, interactive applications.
NeRF On-the-go: Exploiting Uncertainty for Distractor-free NeRFs in the Wild
May 29, 2024



Neural Radiance Fields (NeRFs) have shown remarkable success in synthesizing photorealistic views from multi-view images of static scenes, but face challenges in dynamic, real-world environments with distractors like moving objects, shadows, and lighting changes. Existing methods manage controlled environments and low occlusion ratios but fall short in render quality, especially under high occlusion scenarios. In this paper, we introduce NeRF On-the-go, a simple yet effective approach that enables the robust synthesis of novel views in complex, in-the-wild scenes from only casually captured image sequences. Delving into uncertainty, our method not only efficiently eliminates distractors, even when they are predominant in captures, but also achieves a notably faster convergence speed. Through comprehensive experiments on various scenes, our method demonstrates a significant improvement over state-of-the-art techniques. This advancement opens new avenues for NeRF in diverse and dynamic real-world applications.