 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVirtual Community: An Open World for Humans, Robots, and Society
Aug 20, 2025

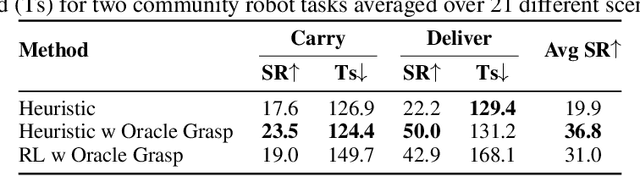

The rapid progress in AI and Robotics may lead to a profound societal transformation, as humans and robots begin to coexist within shared communities, introducing both opportunities and challenges. To explore this future, we present Virtual Community-an open-world platform for humans, robots, and society-built on a universal physics engine and grounded in real-world 3D scenes. With Virtual Community, we aim to study embodied social intelligence at scale: 1) How robots can intelligently cooperate or compete; 2) How humans develop social relations and build community; 3) More importantly, how intelligent robots and humans can co-exist in an open world. To support these, Virtual Community features: 1) An open-source multi-agent physics simulator that supports robots, humans, and their interactions within a society; 2) A large-scale, real-world aligned community generation pipeline, including vast outdoor space, diverse indoor scenes, and a community of grounded agents with rich characters and appearances. Leveraging Virtual Community, we propose two novel challenges. The Community Planning Challenge evaluates multi-agent reasoning and planning ability in open-world settings, such as cooperating to help agents with daily activities and efficiently connecting other agents. The Community Robot Challenge requires multiple heterogeneous robots to collaborate in solving complex open-world tasks. We evaluate various baselines on these tasks and demonstrate the challenges in both high-level open-world task planning and low-level cooperation controls. We hope that Virtual Community will unlock further study of human-robot coexistence within open-world environments.
LuciBot: Automated Robot Policy Learning from Generated Videos
Mar 12, 2025Automatically generating training supervision for embodied tasks is crucial, as manual designing is tedious and not scalable. While prior works use large language models (LLMs) or vision-language models (VLMs) to generate rewards, these approaches are largely limited to simple tasks with well-defined rewards, such as pick-and-place. This limitation arises because LLMs struggle to interpret complex scenes compressed into text or code due to their restricted input modality, while VLM-based rewards, though better at visual perception, remain limited by their less expressive output modality. To address these challenges, we leverage the imagination capability of general-purpose video generation models. Given an initial simulation frame and a textual task description, the video generation model produces a video demonstrating task completion with correct semantics. We then extract rich supervisory signals from the generated video, including 6D object pose sequences, 2D segmentations, and estimated depth, to facilitate task learning in simulation. Our approach significantly improves supervision quality for complex embodied tasks, enabling large-scale training in simulators.
Articulate AnyMesh: Open-Vocabulary 3D Articulated Objects Modeling
Feb 04, 2025



3D articulated objects modeling has long been a challenging problem, since it requires to capture both accurate surface geometries and semantically meaningful and spatially precise structures, parts, and joints. Existing methods heavily depend on training data from a limited set of handcrafted articulated object categories (e.g., cabinets and drawers), which restricts their ability to model a wide range of articulated objects in an open-vocabulary context. To address these limitations, we propose Articulate Anymesh, an automated framework that is able to convert any rigid 3D mesh into its articulated counterpart in an open-vocabulary manner. Given a 3D mesh, our framework utilizes advanced Vision-Language Models and visual prompting techniques to extract semantic information, allowing for both the segmentation of object parts and the construction of functional joints. Our experiments show that Articulate Anymesh can generate large-scale, high-quality 3D articulated objects, including tools, toys, mechanical devices, and vehicles, significantly expanding the coverage of existing 3D articulated object datasets. Additionally, we show that these generated assets can facilitate the acquisition of new articulated object manipulation skills in simulation, which can then be transferred to a real robotic system. Our Github website is https://articulate-anymesh.github.io.
UBSoft: A Simulation Platform for Robotic Skill Learning in Unbounded Soft Environments
Nov 19, 2024It is desired to equip robots with the capability of interacting with various soft materials as they are ubiquitous in the real world. While physics simulations are one of the predominant methods for data collection and robot training, simulating soft materials presents considerable challenges. Specifically, it is significantly more costly than simulating rigid objects in terms of simulation speed and storage requirements. These limitations typically restrict the scope of studies on soft materials to small and bounded areas, thereby hindering the learning of skills in broader spaces. To address this issue, we introduce UBSoft, a new simulation platform designed to support unbounded soft environments for robot skill acquisition. Our platform utilizes spatially adaptive resolution scales, where simulation resolution dynamically adjusts based on proximity to active robotic agents. Our framework markedly reduces the demand for extensive storage space and computation costs required for large-scale scenarios involving soft materials. We also establish a set of benchmark tasks in our platform, including both locomotion and manipulation tasks, and conduct experiments to evaluate the efficacy of various reinforcement learning algorithms and trajectory optimization techniques, both gradient-based and sampling-based. Preliminary results indicate that sampling-based trajectory optimization generally achieves better results for obtaining one trajectory to solve the task. Additionally, we conduct experiments in real-world environments to demonstrate that advancements made in our UBSoft simulator could translate to improved robot interactions with large-scale soft material. More videos can be found at https://vis-www.cs.umass.edu/ubsoft/.
Architect: Generating Vivid and Interactive 3D Scenes with Hierarchical 2D Inpainting
Nov 14, 2024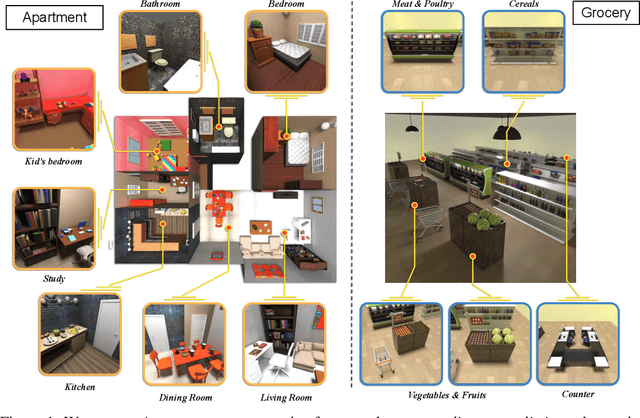
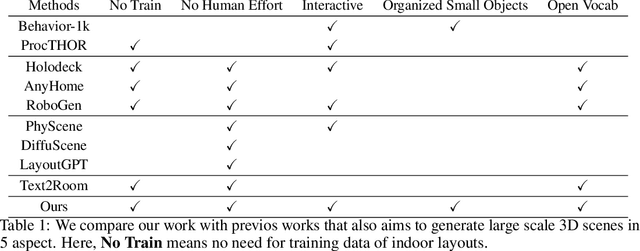
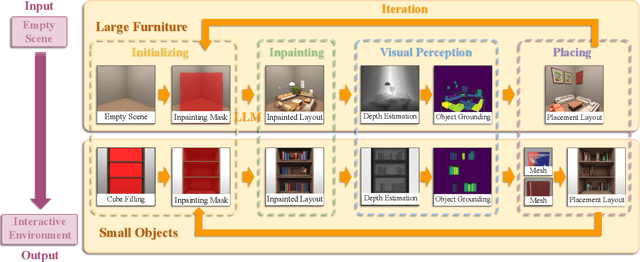
Creating large-scale interactive 3D environments is essential for the development of Robotics and Embodied AI research. Current methods, including manual design, procedural generation, diffusion-based scene generation, and large language model (LLM) guided scene design, are hindered by limitations such as excessive human effort, reliance on predefined rules or training datasets, and limited 3D spatial reasoning ability. Since pre-trained 2D image generative models better capture scene and object configuration than LLMs, we address these challenges by introducing Architect, a generative framework that creates complex and realistic 3D embodied environments leveraging diffusion-based 2D image inpainting. In detail, we utilize foundation visual perception models to obtain each generated object from the image and leverage pre-trained depth estimation models to lift the generated 2D image to 3D space. Our pipeline is further extended to a hierarchical and iterative inpainting process to continuously generate placement of large furniture and small objects to enrich the scene. This iterative structure brings the flexibility for our method to generate or refine scenes from various starting points, such as text, floor plans, or pre-arranged environments.
Thin-Shell Object Manipulations With Differentiable Physics Simulations
Mar 30, 2024



In this work, we aim to teach robots to manipulate various thin-shell materials. Prior works studying thin-shell object manipulation mostly rely on heuristic policies or learn policies from real-world video demonstrations, and only focus on limited material types and tasks (e.g., cloth unfolding). However, these approaches face significant challenges when extended to a wider variety of thin-shell materials and a diverse range of tasks. While virtual simulations are shown to be effective in diverse robot skill learning and evaluation, prior thin-shell simulation environments only support a subset of thin-shell materials, which also limits their supported range of tasks. We introduce ThinShellLab - a fully differentiable simulation platform tailored for robotic interactions with diverse thin-shell materials possessing varying material properties, enabling flexible thin-shell manipulation skill learning and evaluation. Our experiments suggest that manipulating thin-shell objects presents several unique challenges: 1) thin-shell manipulation relies heavily on frictional forces due to the objects' co-dimensional nature, 2) the materials being manipulated are highly sensitive to minimal variations in interaction actions, and 3) the constant and frequent alteration in contact pairs makes trajectory optimization methods susceptible to local optima, and neither standard reinforcement learning algorithms nor trajectory optimization methods (either gradient-based or gradient-free) are able to solve the tasks alone. To overcome these challenges, we present an optimization scheme that couples sampling-based trajectory optimization and gradient-based optimization, boosting both learning efficiency and converged performance across various proposed tasks. In addition, the differentiable nature of our platform facilitates a smooth sim-to-real transition.
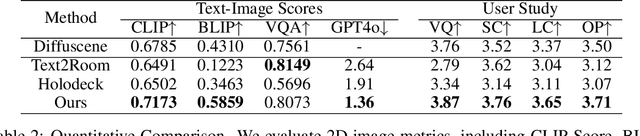
DualAfford: Learning Collaborative Visual Affordance for Dual-gripper Object Manipulation
Jul 05, 2022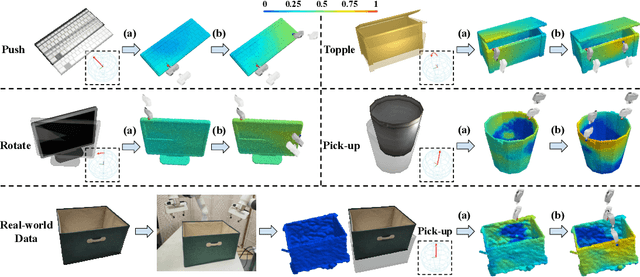
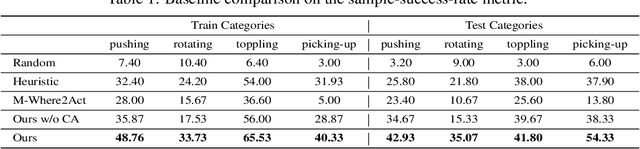
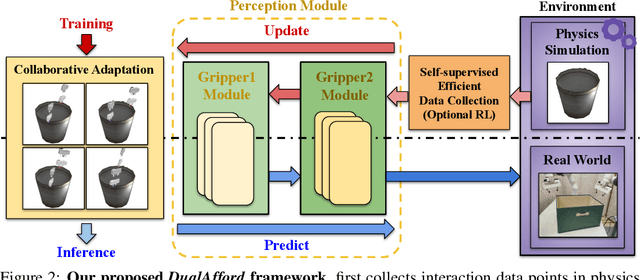

It is essential yet challenging for future home-assistant robots to understand and manipulate diverse 3D objects in daily human environments. Towards building scalable systems that can perform diverse manipulation tasks over various 3D shapes, recent works have advocated and demonstrated promising results learning visual actionable affordance, which labels every point over the input 3D geometry with an action likelihood of accomplishing the downstream task (e.g., pushing or picking-up). However, these works only studied single-gripper manipulation tasks, yet many real-world tasks require two hands to achieve collaboratively. In this work, we propose a novel learning framework, DualAfford, to learn collaborative affordance for dual-gripper manipulation tasks. The core design of the approach is to reduce the quadratic problem for two grippers into two disentangled yet interconnected subtasks for efficient learning. Using the large-scale PartNet-Mobility and ShapeNet datasets, we set up four benchmark tasks for dual-gripper manipulation. Experiments prove the effectiveness and superiority of our method over three baselines. Additional results and videos can be found at https://hyperplane-lab.github.io/DualAfford .
RoboAssembly: Learning Generalizable Furniture Assembly Policy in a Novel Multi-robot Contact-rich Simulation Environment
Dec 19, 2021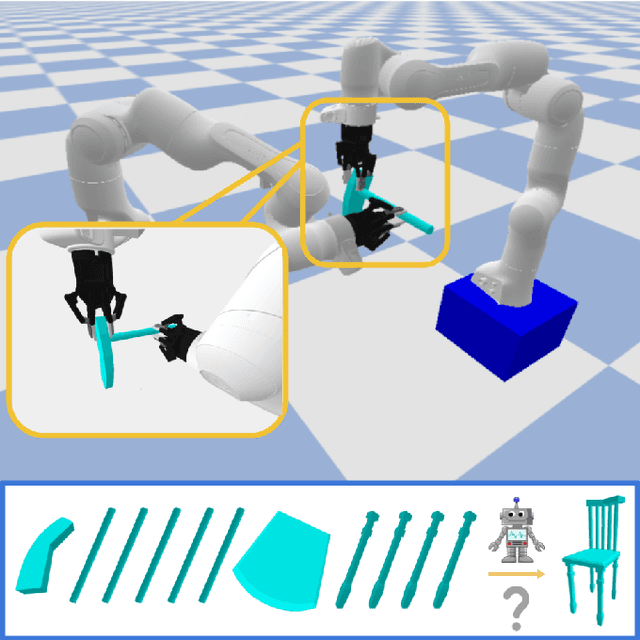
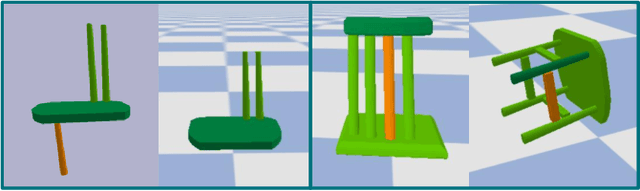
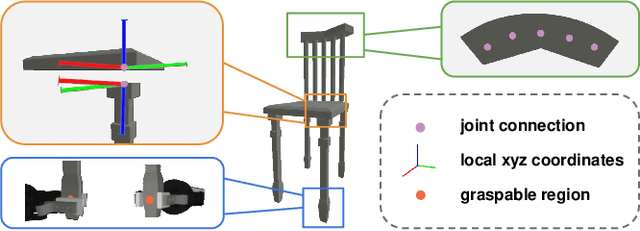
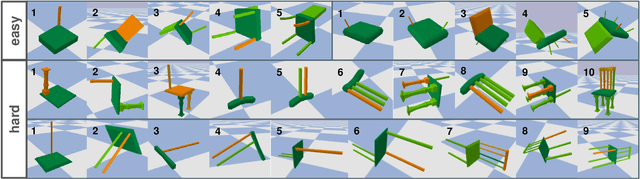
Part assembly is a typical but challenging task in robotics, where robots assemble a set of individual parts into a complete shape. In this paper, we develop a robotic assembly simulation environment for furniture assembly. We formulate the part assembly task as a concrete reinforcement learning problem and propose a pipeline for robots to learn to assemble a diverse set of chairs. Experiments show that when testing with unseen chairs, our approach achieves a success rate of 74.5% under the object-centric setting and 50.0% under the full setting. We adopt an RRT-Connect algorithm as the baseline, which only achieves a success rate of 18.8% after a significantly longer computation time. Supplemental materials and videos are available on our project webpage.