 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThin-Shell Object Manipulations With Differentiable Physics Simulations
Mar 30, 2024



In this work, we aim to teach robots to manipulate various thin-shell materials. Prior works studying thin-shell object manipulation mostly rely on heuristic policies or learn policies from real-world video demonstrations, and only focus on limited material types and tasks (e.g., cloth unfolding). However, these approaches face significant challenges when extended to a wider variety of thin-shell materials and a diverse range of tasks. While virtual simulations are shown to be effective in diverse robot skill learning and evaluation, prior thin-shell simulation environments only support a subset of thin-shell materials, which also limits their supported range of tasks. We introduce ThinShellLab - a fully differentiable simulation platform tailored for robotic interactions with diverse thin-shell materials possessing varying material properties, enabling flexible thin-shell manipulation skill learning and evaluation. Our experiments suggest that manipulating thin-shell objects presents several unique challenges: 1) thin-shell manipulation relies heavily on frictional forces due to the objects' co-dimensional nature, 2) the materials being manipulated are highly sensitive to minimal variations in interaction actions, and 3) the constant and frequent alteration in contact pairs makes trajectory optimization methods susceptible to local optima, and neither standard reinforcement learning algorithms nor trajectory optimization methods (either gradient-based or gradient-free) are able to solve the tasks alone. To overcome these challenges, we present an optimization scheme that couples sampling-based trajectory optimization and gradient-based optimization, boosting both learning efficiency and converged performance across various proposed tasks. In addition, the differentiable nature of our platform facilitates a smooth sim-to-real transition.
DiffuseBot: Breeding Soft Robots With Physics-Augmented Generative Diffusion Models
Nov 28, 2023
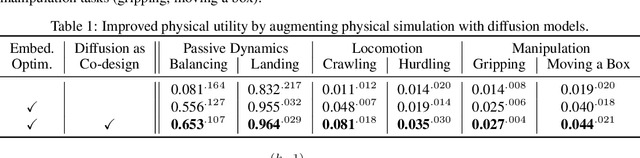
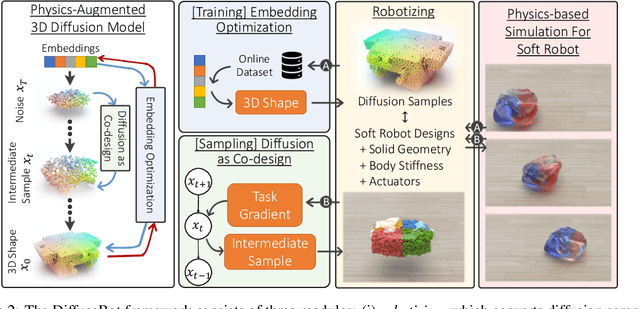

Nature evolves creatures with a high complexity of morphological and behavioral intelligence, meanwhile computational methods lag in approaching that diversity and efficacy. Co-optimization of artificial creatures' morphology and control in silico shows promise for applications in physical soft robotics and virtual character creation; such approaches, however, require developing new learning algorithms that can reason about function atop pure structure. In this paper, we present DiffuseBot, a physics-augmented diffusion model that generates soft robot morphologies capable of excelling in a wide spectrum of tasks. DiffuseBot bridges the gap between virtually generated content and physical utility by (i) augmenting the diffusion process with a physical dynamical simulation which provides a certificate of performance, and (ii) introducing a co-design procedure that jointly optimizes physical design and control by leveraging information about physical sensitivities from differentiable simulation. We showcase a range of simulated and fabricated robots along with their capabilities. Check our website at https://diffusebot.github.io/
CAMS: CAnonicalized Manipulation Spaces for Category-Level Functional Hand-Object Manipulation Synthesis
Mar 25, 2023



In this work, we focus on a novel task of category-level functional hand-object manipulation synthesis covering both rigid and articulated object categories. Given an object geometry, an initial human hand pose as well as a sparse control sequence of object poses, our goal is to generate a physically reasonable hand-object manipulation sequence that performs like human beings. To address such a challenge, we first design CAnonicalized Manipulation Spaces (CAMS), a two-level space hierarchy that canonicalizes the hand poses in an object-centric and contact-centric view. Benefiting from the representation capability of CAMS, we then present a two-stage framework for synthesizing human-like manipulation animations. Our framework achieves state-of-the-art performance for both rigid and articulated categories with impressive visual effects. Codes and video results can be found at our project homepage: https://cams-hoi.github.io/