 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtremControl: Low-Latency Humanoid Teleoperation with Direct Extremity Control
Feb 11, 2026Building a low-latency humanoid teleoperation system is essential for collecting diverse reactive and dynamic demonstrations. However, existing approaches rely on heavily pre-processed human-to-humanoid motion retargeting and position-only PD control, resulting in substantial latency that severely limits responsiveness and prevents tasks requiring rapid feedback and fast reactions. To address this problem, we propose ExtremControl, a low latency whole-body control framework that: (1) operates directly on SE(3) poses of selected rigid links, primarily humanoid extremities, to avoid full-body retargeting; (2) utilizes a Cartesian-space mapping to directly convert human motion to humanoid link targets; and (3) incorporates velocity feedforward control at low level to support highly responsive behavior under rapidly changing control interfaces. We further provide a unified theoretical formulation of ExtremControl and systematically validate its effectiveness through experiments in both simulation and real-world environments. Building on ExtremControl, we implement a low-latency humanoid teleoperation system that supports both optical motion capture and VR-based motion tracking, achieving end-to-end latency as low as 50ms and enabling highly responsive behaviors such as ping-pong ball balancing, juggling, and real-time return, thereby substantially surpassing the 200ms latency limit observed in prior work.
Virtual Community: An Open World for Humans, Robots, and Society
Aug 20, 2025

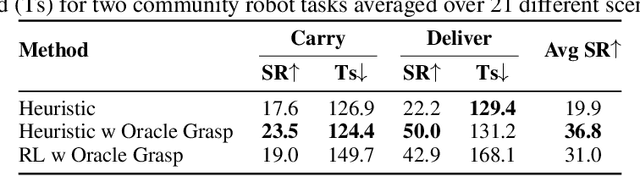

The rapid progress in AI and Robotics may lead to a profound societal transformation, as humans and robots begin to coexist within shared communities, introducing both opportunities and challenges. To explore this future, we present Virtual Community-an open-world platform for humans, robots, and society-built on a universal physics engine and grounded in real-world 3D scenes. With Virtual Community, we aim to study embodied social intelligence at scale: 1) How robots can intelligently cooperate or compete; 2) How humans develop social relations and build community; 3) More importantly, how intelligent robots and humans can co-exist in an open world. To support these, Virtual Community features: 1) An open-source multi-agent physics simulator that supports robots, humans, and their interactions within a society; 2) A large-scale, real-world aligned community generation pipeline, including vast outdoor space, diverse indoor scenes, and a community of grounded agents with rich characters and appearances. Leveraging Virtual Community, we propose two novel challenges. The Community Planning Challenge evaluates multi-agent reasoning and planning ability in open-world settings, such as cooperating to help agents with daily activities and efficiently connecting other agents. The Community Robot Challenge requires multiple heterogeneous robots to collaborate in solving complex open-world tasks. We evaluate various baselines on these tasks and demonstrate the challenges in both high-level open-world task planning and low-level cooperation controls. We hope that Virtual Community will unlock further study of human-robot coexistence within open-world environments.
UBSoft: A Simulation Platform for Robotic Skill Learning in Unbounded Soft Environments
Nov 19, 2024It is desired to equip robots with the capability of interacting with various soft materials as they are ubiquitous in the real world. While physics simulations are one of the predominant methods for data collection and robot training, simulating soft materials presents considerable challenges. Specifically, it is significantly more costly than simulating rigid objects in terms of simulation speed and storage requirements. These limitations typically restrict the scope of studies on soft materials to small and bounded areas, thereby hindering the learning of skills in broader spaces. To address this issue, we introduce UBSoft, a new simulation platform designed to support unbounded soft environments for robot skill acquisition. Our platform utilizes spatially adaptive resolution scales, where simulation resolution dynamically adjusts based on proximity to active robotic agents. Our framework markedly reduces the demand for extensive storage space and computation costs required for large-scale scenarios involving soft materials. We also establish a set of benchmark tasks in our platform, including both locomotion and manipulation tasks, and conduct experiments to evaluate the efficacy of various reinforcement learning algorithms and trajectory optimization techniques, both gradient-based and sampling-based. Preliminary results indicate that sampling-based trajectory optimization generally achieves better results for obtaining one trajectory to solve the task. Additionally, we conduct experiments in real-world environments to demonstrate that advancements made in our UBSoft simulator could translate to improved robot interactions with large-scale soft material. More videos can be found at https://vis-www.cs.umass.edu/ubsoft/.
CAMS: CAnonicalized Manipulation Spaces for Category-Level Functional Hand-Object Manipulation Synthesis
Mar 25, 2023



In this work, we focus on a novel task of category-level functional hand-object manipulation synthesis covering both rigid and articulated object categories. Given an object geometry, an initial human hand pose as well as a sparse control sequence of object poses, our goal is to generate a physically reasonable hand-object manipulation sequence that performs like human beings. To address such a challenge, we first design CAnonicalized Manipulation Spaces (CAMS), a two-level space hierarchy that canonicalizes the hand poses in an object-centric and contact-centric view. Benefiting from the representation capability of CAMS, we then present a two-stage framework for synthesizing human-like manipulation animations. Our framework achieves state-of-the-art performance for both rigid and articulated categories with impressive visual effects. Codes and video results can be found at our project homepage: https://cams-hoi.github.io/