 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArchitect: Generating Vivid and Interactive 3D Scenes with Hierarchical 2D Inpainting
Paper and Code
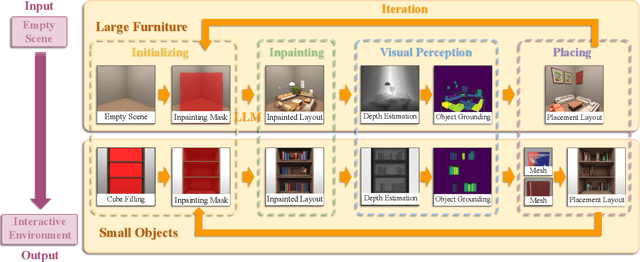
Creating large-scale interactive 3D environments is essential for the development of Robotics and Embodied AI research. Current methods, including manual design, procedural generation, diffusion-based scene generation, and large language model (LLM) guided scene design, are hindered by limitations such as excessive human effort, reliance on predefined rules or training datasets, and limited 3D spatial reasoning ability. Since pre-trained 2D image generative models better capture scene and object configuration than LLMs, we address these challenges by introducing Architect, a generative framework that creates complex and realistic 3D embodied environments leveraging diffusion-based 2D image inpainting. In detail, we utilize foundation visual perception models to obtain each generated object from the image and leverage pre-trained depth estimation models to lift the generated 2D image to 3D space. Our pipeline is further extended to a hierarchical and iterative inpainting process to continuously generate placement of large furniture and small objects to enrich the scene. This iterative structure brings the flexibility for our method to generate or refine scenes from various starting points, such as text, floor plans, or pre-arranged environments.