 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboAssembly: Learning Generalizable Furniture Assembly Policy in a Novel Multi-robot Contact-rich Simulation Environment
Paper and Code
Dec 19, 2021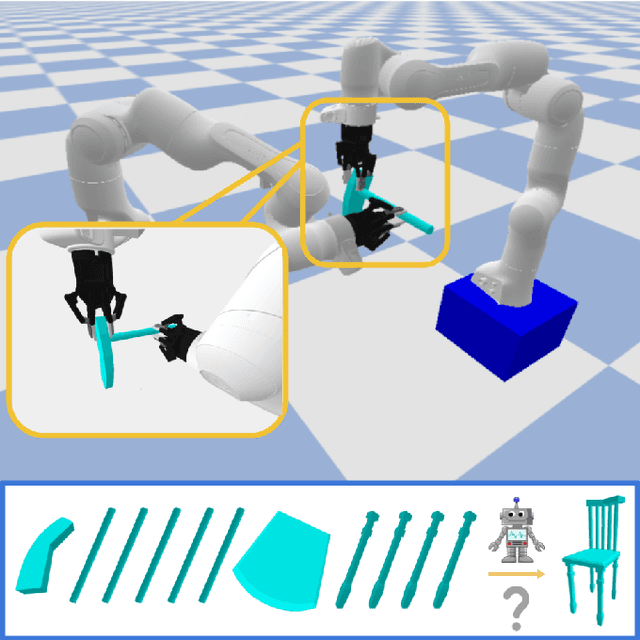
Part assembly is a typical but challenging task in robotics, where robots assemble a set of individual parts into a complete shape. In this paper, we develop a robotic assembly simulation environment for furniture assembly. We formulate the part assembly task as a concrete reinforcement learning problem and propose a pipeline for robots to learn to assemble a diverse set of chairs. Experiments show that when testing with unseen chairs, our approach achieves a success rate of 74.5% under the object-centric setting and 50.0% under the full setting. We adopt an RRT-Connect algorithm as the baseline, which only achieves a success rate of 18.8% after a significantly longer computation time. Supplemental materials and videos are available on our project webpage.