 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding Community Bias Amplification in Graph Representation Learning
Dec 08, 2023In this work, we discover a phenomenon of community bias amplification in graph representation learning, which refers to the exacerbation of performance bias between different classes by graph representation learning. We conduct an in-depth theoretical study of this phenomenon from a novel spectral perspective. Our analysis suggests that structural bias between communities results in varying local convergence speeds for node embeddings. This phenomenon leads to bias amplification in the classification results of downstream tasks. Based on the theoretical insights, we propose random graph coarsening, which is proved to be effective in dealing with the above issue. Finally, we propose a novel graph contrastive learning model called Random Graph Coarsening Contrastive Learning (RGCCL), which utilizes random coarsening as data augmentation and mitigates community bias by contrasting the coarsened graph with the original graph. Extensive experiments on various datasets demonstrate the advantage of our method when dealing with community bias amplification.
Maximum Consensus Localization using an Objective Function based on Helmert's Point Error
Feb 21, 2023Ego-localization is a crucial task for autonomous vehicles. On the one hand, it needs to be very accurate, and on the other hand, very robust to provide reliable pose (position and orientation) information, even in challenging environments. Finding the best ego-position is usually tied to optimizing an objective function based on the sensor measurements. The most common approach is to maximize the likelihood, which leads under the assumption of normally distributed random variables to the well-known least squares minimization, often used in conjunction with recursive estimation, e. g. using a Kalman filter. However, least squares minimization is inherently sensitive to outliers, and consequently, more robust loss functions, such as L1 norm or Huber loss have been proposed. Arguably the most robust loss function is the outlier count, also known as maximum consensus optimization, where the outcome is independent of the outlier magnitude. In this paper, we investigate in detail the performance of maximum consensus localization based on LiDAR data. We elaborate on its shortcomings and propose a novel objective function based on Helmert's point error. In an experiment using 3001 measurement epochs, we show that the maximum consensus localization based on the introduced objective function provides superior results with respect to robustness.
OpenLORIS-Object: A Dataset and Benchmark towards Lifelong Object Recognition
Nov 15, 2019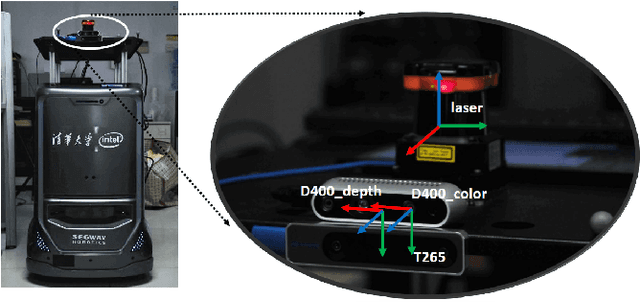
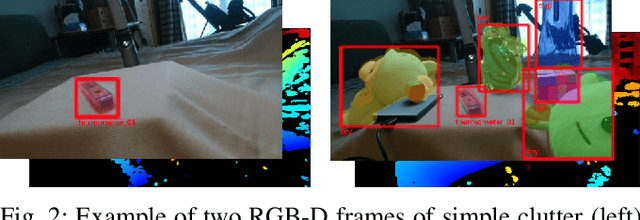
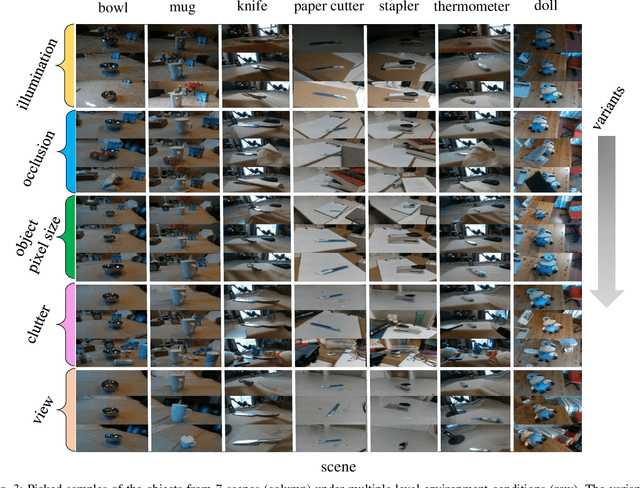
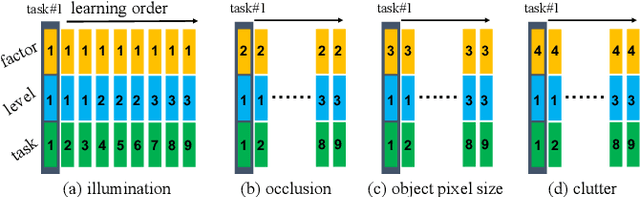
The recent breakthroughs in computer vision have benefited from the availability of large representative datasets (e.g. ImageNet and COCO) for training. Yet, robotic vision poses unique challenges for applying visual algorithms developed from these standard computer vision datasets due to their implicit assumption over non-varying distributions for a fixed set of tasks. Fully retraining models each time a new task becomes available is infeasible due to computational, storage and sometimes privacy issues, while na\"{i}ve incremental strategies have been shown to suffer from catastrophic forgetting. It is crucial for the robots to operate continuously under open-set and detrimental conditions with adaptive visual perceptual systems, where lifelong learning is a fundamental capability. However, very few datasets and benchmarks are available to evaluate and compare emerging techniques. To fill this gap, we provide a new lifelong robotic vision dataset ("OpenLORIS-Object") collected via RGB-D cameras mounted on mobile robots. The dataset embeds the challenges faced by a robot in the real-life application and provides new benchmarks for validating lifelong object recognition algorithms. Moreover, we have provided a testbed of $9$ state-of-the-art lifelong learning algorithms. Each of them involves $48$ tasks with $4$ evaluation metrics over the OpenLORIS-Object dataset. The results demonstrate that the object recognition task in the ever-changing difficulty environments is far from being solved and the bottlenecks are at the forward/backward transfer designs. Our dataset and benchmark are publicly available at \href{https://lifelong-robotic-vision.github.io/dataset/Data_Object-Recognition.html}{\underline{this url}}.
Are We Ready for Service Robots? The OpenLORIS-Scene Datasets for Lifelong SLAM
Nov 13, 2019
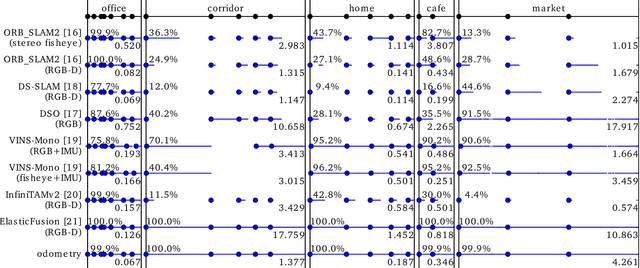
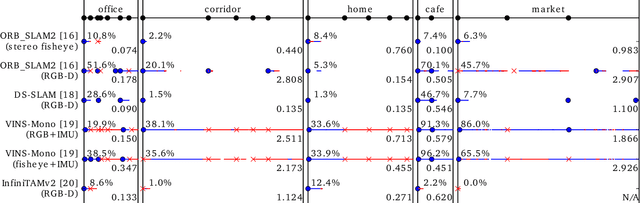
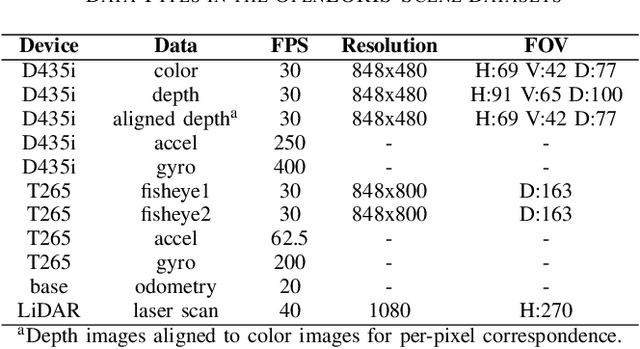
Service robots should be able to operate autonomously in dynamic and daily changing environments over an extended period of time. While Simultaneous Localization And Mapping (SLAM) is one of the most fundamental problems for robotic autonomy, most existing SLAM works are evaluated with data sequences that are recorded in a short period of time. In real-world deployment, there can be out-of-sight scene changes caused by both natural factors and human activities. For example, in home scenarios, most objects may be movable, replaceable or deformable, and the visual features of the same place may be significantly different in some successive days. Such out-of-sight dynamics pose great challenges to the robustness of pose estimation, and hence a robot's long-term deployment and operation. To differentiate the forementioned problem from the conventional works which are usually evaluated in a static setting in a single run, the term lifelong SLAM is used here to address SLAM problems in an ever-changing environment over a long period of time. To accelerate lifelong SLAM research, we release the OpenLORIS-Scene datasets. The data are collected in real-world indoor scenes, for multiple times in each place to include scene changes in real life. We also design benchmarking metrics for lifelong SLAM, with which the robustness and accuracy of pose estimation are evaluated separately. The datasets and benchmark are available online at https://lifelong-robotic-vision.github.io/dataset/scene.