 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeciphering the unique dynamic activation pathway in a G protein-coupled receptor enables unveiling biased signaling and identifying cryptic allosteric sites in conformational intermediates
Apr 24, 2025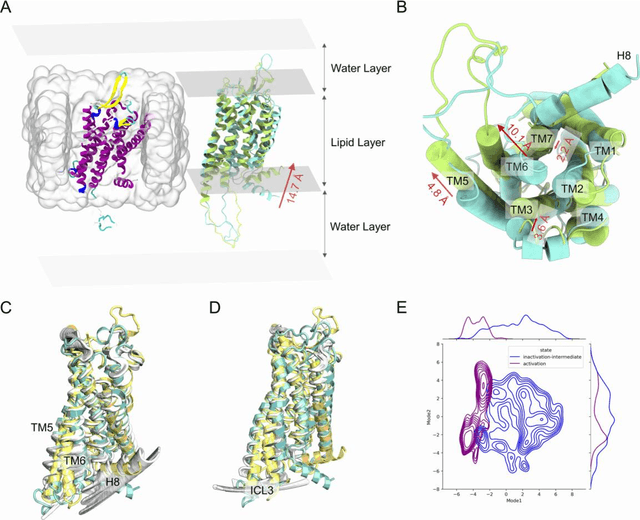
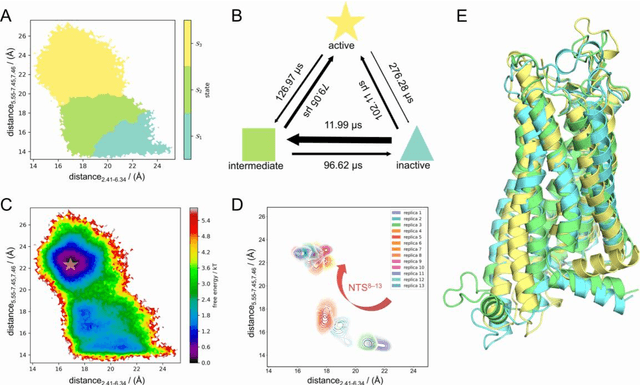
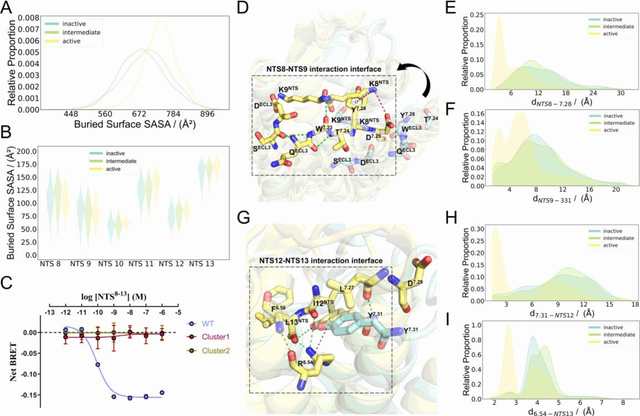
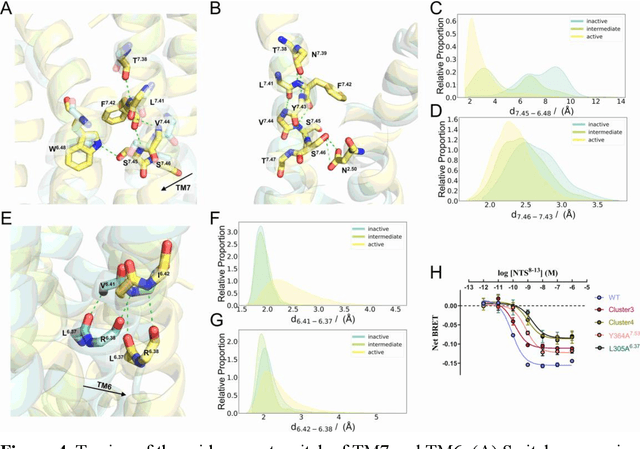
Neurotensin receptor 1 (NTSR1), a member of the Class A G protein-coupled receptor superfamily, plays an important role in modulating dopaminergic neuronal activity and eliciting opioid-independent analgesia. Recent studies suggest that promoting \{beta}-arrestin-biased signaling in NTSR1 may diminish drugs of abuse, such as psychostimulants, thereby offering a potential avenue for treating human addiction-related disorders. In this study, we utilized a novel computational and experimental approach that combined nudged elastic band-based molecular dynamics simulations, Markov state models, temporal communication network analysis, site-directed mutagenesis, and conformational biosensors, to explore the intricate mechanisms underlying NTSR1 activation and biased signaling. Our study reveals a dynamic stepwise transition mechanism and activated transmission network associated with NTSR1 activation. It also yields valuable insights into the complex interplay between the unique polar network, non-conserved ion locks, and aromatic clusters in NTSR1 signaling. Moreover, we identified a cryptic allosteric site located in the intracellular region of the receptor that exists in an intermediate state within the activation pathway. Collectively, these findings contribute to a more profound understanding of NTSR1 activation and biased signaling at the atomic level, thereby providing a potential strategy for the development of NTSR1 allosteric modulators in the realm of G protein-coupled receptor biology, biophysics, and medicine.
Are We Ready for Service Robots? The OpenLORIS-Scene Datasets for Lifelong SLAM
Nov 13, 2019
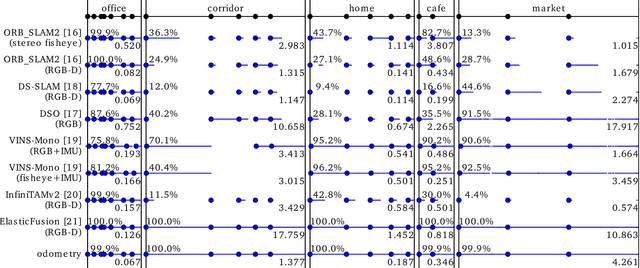
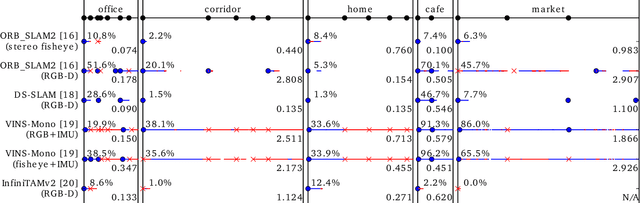
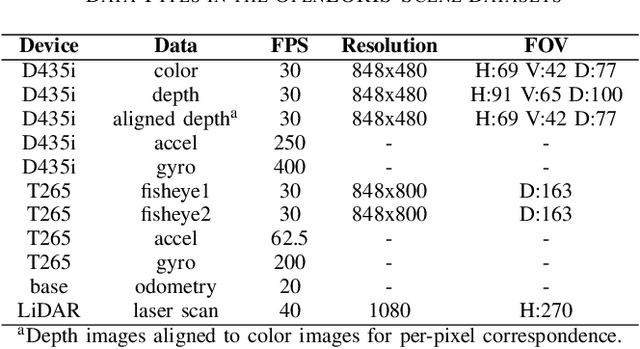
Service robots should be able to operate autonomously in dynamic and daily changing environments over an extended period of time. While Simultaneous Localization And Mapping (SLAM) is one of the most fundamental problems for robotic autonomy, most existing SLAM works are evaluated with data sequences that are recorded in a short period of time. In real-world deployment, there can be out-of-sight scene changes caused by both natural factors and human activities. For example, in home scenarios, most objects may be movable, replaceable or deformable, and the visual features of the same place may be significantly different in some successive days. Such out-of-sight dynamics pose great challenges to the robustness of pose estimation, and hence a robot's long-term deployment and operation. To differentiate the forementioned problem from the conventional works which are usually evaluated in a static setting in a single run, the term lifelong SLAM is used here to address SLAM problems in an ever-changing environment over a long period of time. To accelerate lifelong SLAM research, we release the OpenLORIS-Scene datasets. The data are collected in real-world indoor scenes, for multiple times in each place to include scene changes in real life. We also design benchmarking metrics for lifelong SLAM, with which the robustness and accuracy of pose estimation are evaluated separately. The datasets and benchmark are available online at https://lifelong-robotic-vision.github.io/dataset/scene.