 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMVP-CBM:Multi-layer Visual Preference-enhanced Concept Bottleneck Model for Explainable Medical Image Classification
Jun 14, 2025The concept bottleneck model (CBM), as a technique improving interpretability via linking predictions to human-understandable concepts, makes high-risk and life-critical medical image classification credible. Typically, existing CBM methods associate the final layer of visual encoders with concepts to explain the model's predictions. However, we empirically discover the phenomenon of concept preference variation, that is, the concepts are preferably associated with the features at different layers than those only at the final layer; yet a blind last-layer-based association neglects such a preference variation and thus weakens the accurate correspondences between features and concepts, impairing model interpretability. To address this issue, we propose a novel Multi-layer Visual Preference-enhanced Concept Bottleneck Model (MVP-CBM), which comprises two key novel modules: (1) intra-layer concept preference modeling, which captures the preferred association of different concepts with features at various visual layers, and (2) multi-layer concept sparse activation fusion, which sparsely aggregates concept activations from multiple layers to enhance performance. Thus, by explicitly modeling concept preferences, MVP-CBM can comprehensively leverage multi-layer visual information to provide a more nuanced and accurate explanation of model decisions. Extensive experiments on several public medical classification benchmarks demonstrate that MVP-CBM achieves state-of-the-art accuracy and interoperability, verifying its superiority. Code is available at https://github.com/wcj6/MVP-CBM.
* 7 pages, 6 figures,
Comparative Analysis of Extrinsic Factors for NER in French
Oct 16, 2024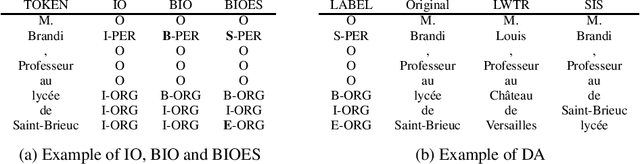



Named entity recognition (NER) is a crucial task that aims to identify structured information, which is often replete with complex, technical terms and a high degree of variability. Accurate and reliable NER can facilitate the extraction and analysis of important information. However, NER for other than English is challenging due to limited data availability, as the high expertise, time, and expenses are required to annotate its data. In this paper, by using the limited data, we explore various factors including model structure, corpus annotation scheme and data augmentation techniques to improve the performance of a NER model for French. Our experiments demonstrate that these approaches can significantly improve the model's F1 score from original CRF score of 62.41 to 79.39. Our findings suggest that considering different extrinsic factors and combining these techniques is a promising approach for improving NER performance where the size of data is limited.
Yaw-Guided Imitation Learning for Autonomous Driving in Urban Environments
Nov 11, 2021

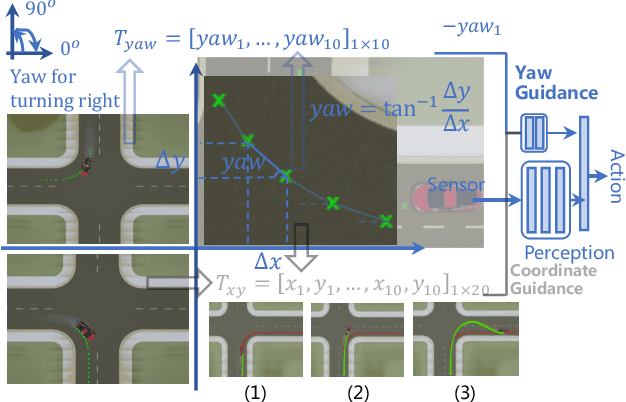
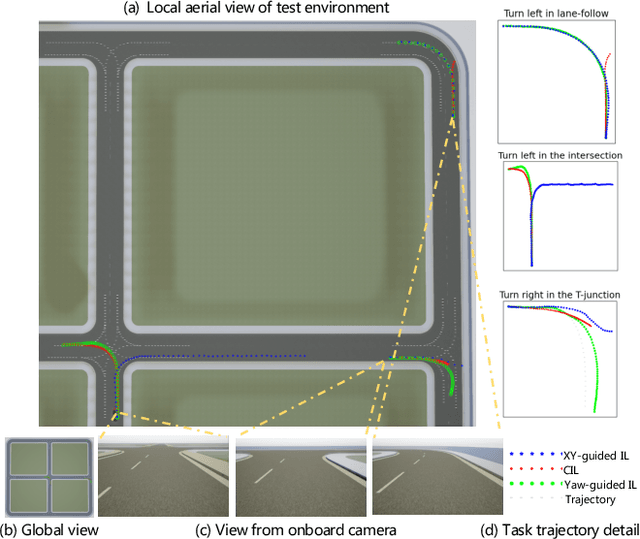
Existing imitation learning methods suffer from low efficiency and generalization ability when facing the road option problem in an urban environment. In this paper, we propose a yaw-guided imitation learning method to improve the road option performance in an end-to-end autonomous driving paradigm in terms of the efficiency of exploiting training samples and adaptability to changing environments. Specifically, the yaw information is provided by the trajectory of the navigation map. Our end-to-end architecture, Yaw-guided Imitation Learning with ResNet34 Attention (YILRatt), integrates the ResNet34 backbone and attention mechanism to obtain an accurate perception. It does not need high precision maps and realizes fully end-to-end autonomous driving given the yaw information provided by a consumer-level GPS receiver. By analyzing the attention heat maps, we can reveal some causal relationship between decision-making and scene perception, where, in particular, failure cases are caused by erroneous perception. We collect expert experience in the Carla 0.9.11 simulator and improve the benchmark CoRL2017 and NoCrash. Experimental results show that YILRatt has a 26.27% higher success rate than the SOTA CILRS. The code, dataset, benchmark and experimental results can be found at https://github.com/Yandong024/Yaw-guided-IL.git
Hercules: An Autonomous Logistic Vehicle for Contact-less Goods Transportation During the COVID-19 Outbreak
Apr 16, 2020
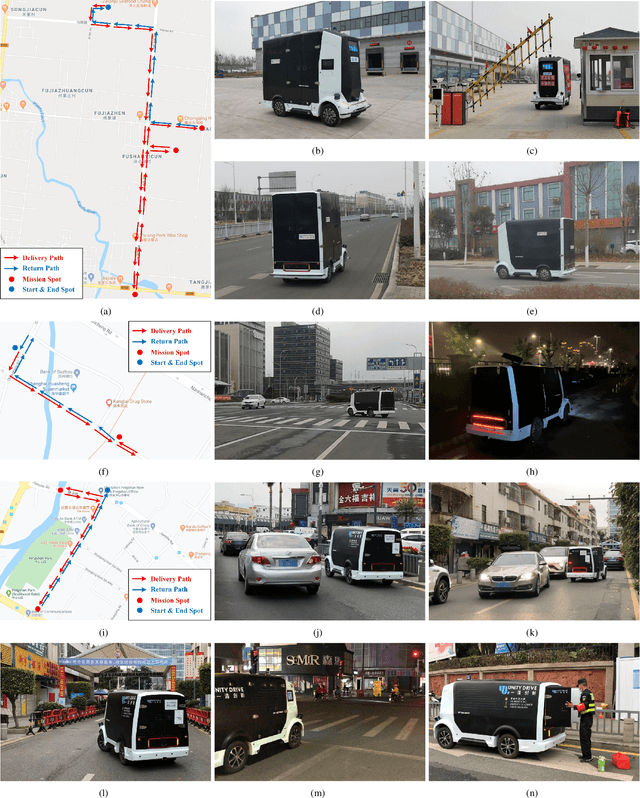
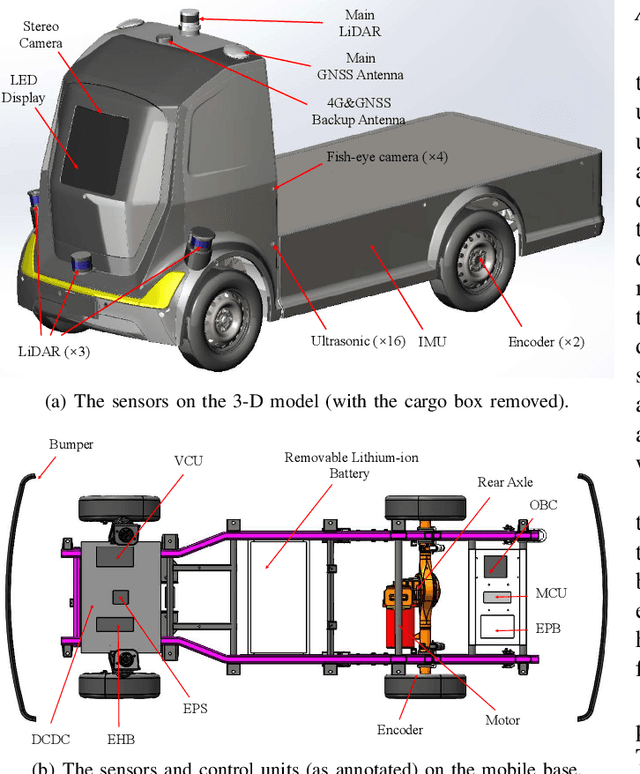
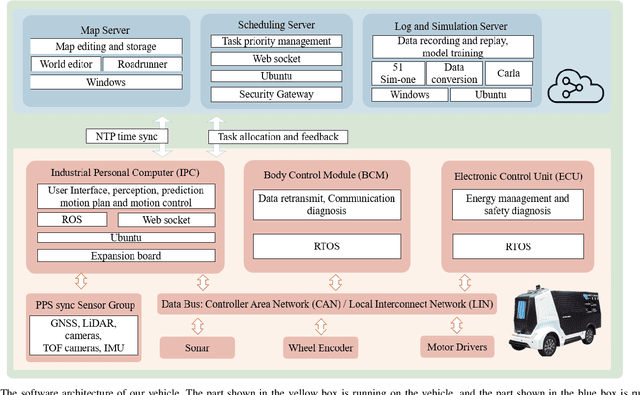
Since December 2019, the coronavirus disease 2019 (COVID-19) has spread rapidly across China. As at the date of writing this article, the disease has been globally reported in 100 countries, infected over 100,000 people and caused over 3,000 deaths. Avoiding person-to-person transmission is an effective approach to control and prevent the epidemic. However, many daily activities, such as logistics transporting goods in our daily life, inevitably involve person-to-person contact. To achieve contact-less goods transportation, using an autonomous logistic vehicle has become the preferred choice. This article presents Hercules, an autonomous logistic vehicle used for contact-less goods transportation during the outbreak of COVID-19. The vehicle is designed with autonomous navigation capability. We provide details on the hardware and software, as well as the algorithms to achieve autonomous navigation including perception, planning and control. This paper is accompanied by a demonstration video and a dataset, which are available here: https://sites.google.com/view/contact-less-transportation.
Semantic Scan: Detecting Subtle, Spatially Localized Events in Text Streams
Feb 13, 2016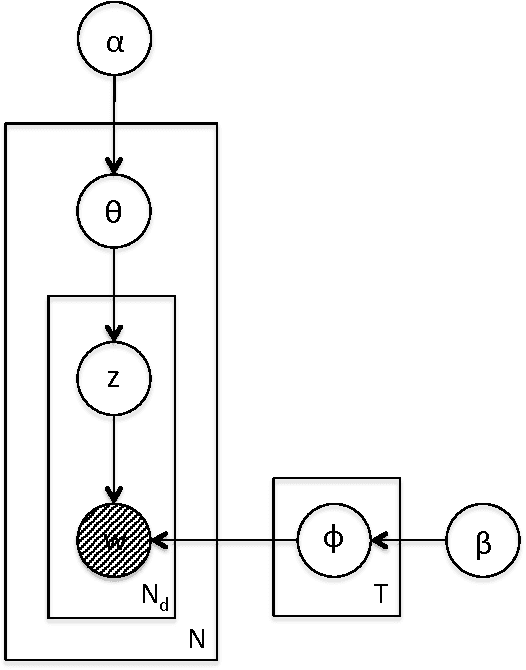
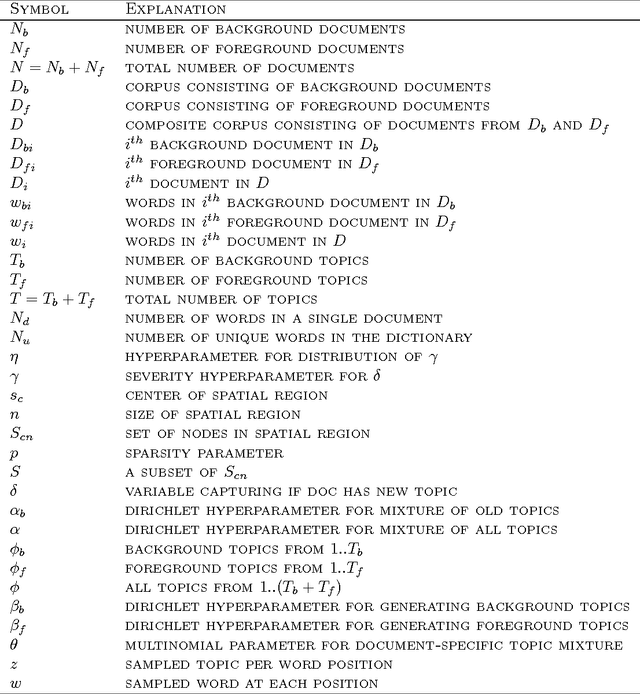
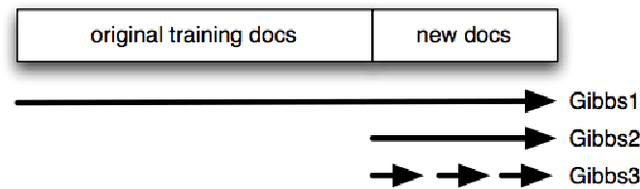

Early detection and precise characterization of emerging topics in text streams can be highly useful in applications such as timely and targeted public health interventions and discovering evolving regional business trends. Many methods have been proposed for detecting emerging events in text streams using topic modeling. However, these methods have numerous shortcomings that make them unsuitable for rapid detection of locally emerging events on massive text streams. In this paper, we describe Semantic Scan (SS) that has been developed specifically to overcome these shortcomings in detecting new spatially compact events in text streams. Semantic Scan integrates novel contrastive topic modeling with online document assignment and principled likelihood ratio-based spatial scanning to identify emerging events with unexpected patterns of keywords hidden in text streams. This enables more timely and accurate detection and characterization of anomalous, spatially localized emerging events. Semantic Scan does not require manual intervention or labeled training data, and is robust to noise in real-world text data since it identifies anomalous text patterns that occur in a cluster of new documents rather than an anomaly in a single new document. We compare Semantic Scan to alternative state-of-the-art methods such as Topics over Time, Online LDA, and Labeled LDA on two real-world tasks: (i) a disease surveillance task monitoring free-text Emergency Department chief complaints in Allegheny County, and (ii) an emerging business trend detection task based on Yelp reviews. On both tasks, we find that Semantic Scan provides significantly better event detection and characterization accuracy than competing approaches, while providing up to an order of magnitude speedup.