 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHercules: An Autonomous Logistic Vehicle for Contact-less Goods Transportation During the COVID-19 Outbreak
Apr 16, 2020
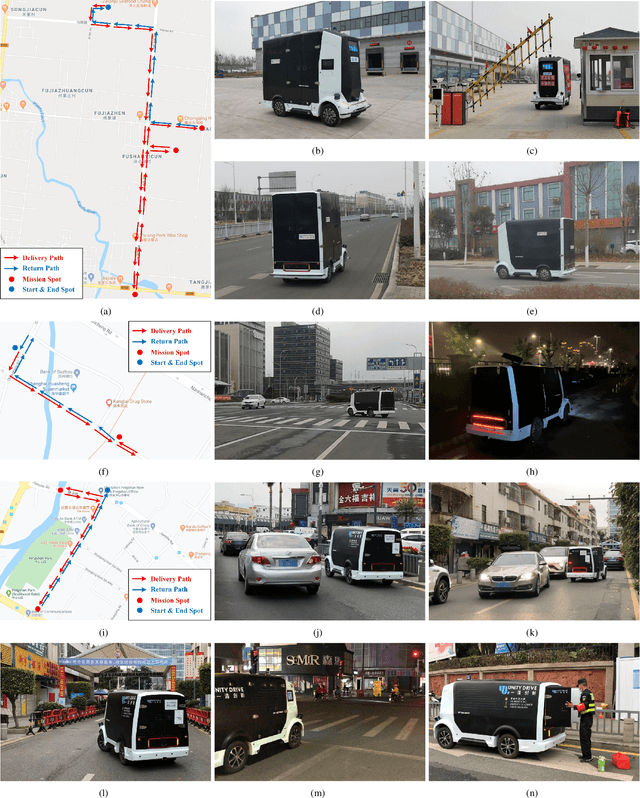
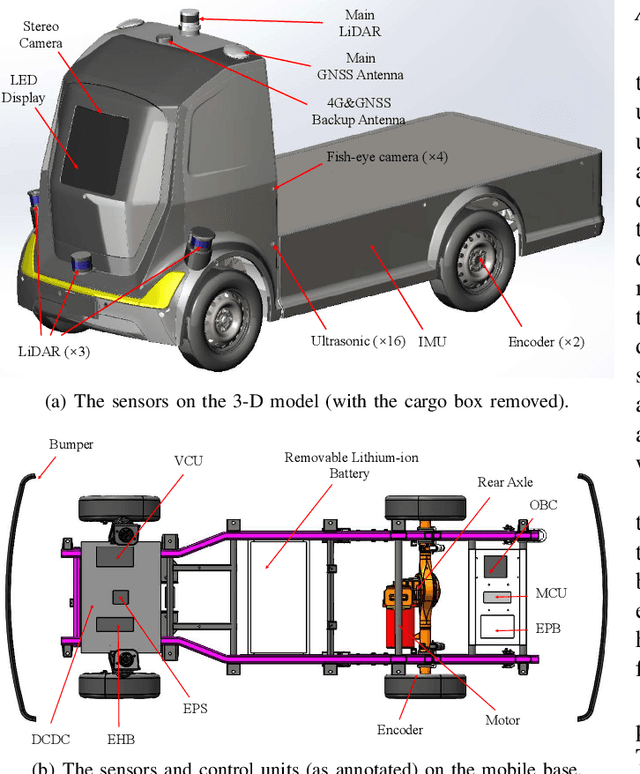
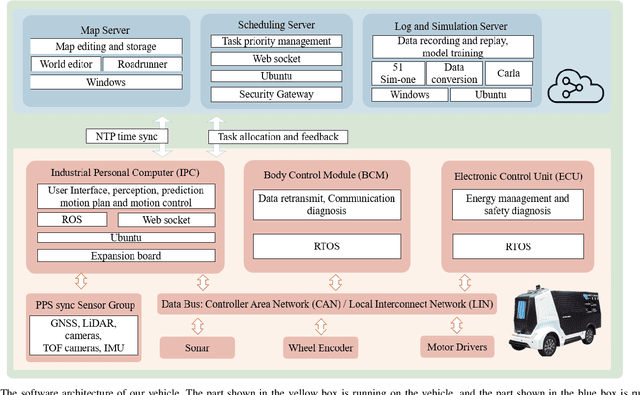
Since December 2019, the coronavirus disease 2019 (COVID-19) has spread rapidly across China. As at the date of writing this article, the disease has been globally reported in 100 countries, infected over 100,000 people and caused over 3,000 deaths. Avoiding person-to-person transmission is an effective approach to control and prevent the epidemic. However, many daily activities, such as logistics transporting goods in our daily life, inevitably involve person-to-person contact. To achieve contact-less goods transportation, using an autonomous logistic vehicle has become the preferred choice. This article presents Hercules, an autonomous logistic vehicle used for contact-less goods transportation during the outbreak of COVID-19. The vehicle is designed with autonomous navigation capability. We provide details on the hardware and software, as well as the algorithms to achieve autonomous navigation including perception, planning and control. This paper is accompanied by a demonstration video and a dataset, which are available here: https://sites.google.com/view/contact-less-transportation.
Automatic Calibration of Multiple 3D LiDARs in Urban Environments
May 13, 2019



Multiple LiDARs have progressively emerged on autonomous vehicles for rendering a wide field of view and dense measurements. However, the lack of precise calibration negatively affects their potential applications in localization and perception systems. In this paper, we propose a novel system that enables automatic multi-LiDAR calibration without any calibration target, prior environmental information, and initial values of the extrinsic parameters. Our approach starts with a hand-eye calibration for automatic initialization by aligning the estimated motions of each sensor. The resulting parameters are then refined with an appearance-based method by minimizing a cost function constructed from point-plane correspondences. Experimental results on simulated and real-world data sets demonstrate the reliability and accuracy of our calibration approach. The proposed approach can calibrate a multi-LiDAR system with the rotation and translation errors less than 0.04 [rad] and 0.1 [m] respectively for a mobile platform.
A Novel Dual-Lidar Calibration Algorithm Using Planar Surfaces
Apr 27, 2019



Multiple lidars are prevalently used on mobile vehicles for rendering a broad view to enhance the performance of localization and perception systems. However, precise calibration of multiple lidars is challenging since the feature correspondences in scan points cannot always provide enough constraints. To address this problem, the existing methods require fixed calibration targets in scenes or rely exclusively on additional sensors. In this paper, we present a novel method that enables automatic lidar calibration without these restrictions. Three linearly independent planar surfaces appearing in surroundings is utilized to find correspondences. Two components are developed to ensure the extrinsic parameters to be found: a closed-form solver for initialization and an optimizer for refinement by minimizing a nonlinear cost function. Simulation and experimental results demonstrate the high accuracy of our calibration approach with the rotation and translation errors smaller than 0.05rad and 0.1m respectively.
Characterization of a RS-LiDAR for 3D Perception
Sep 22, 2017
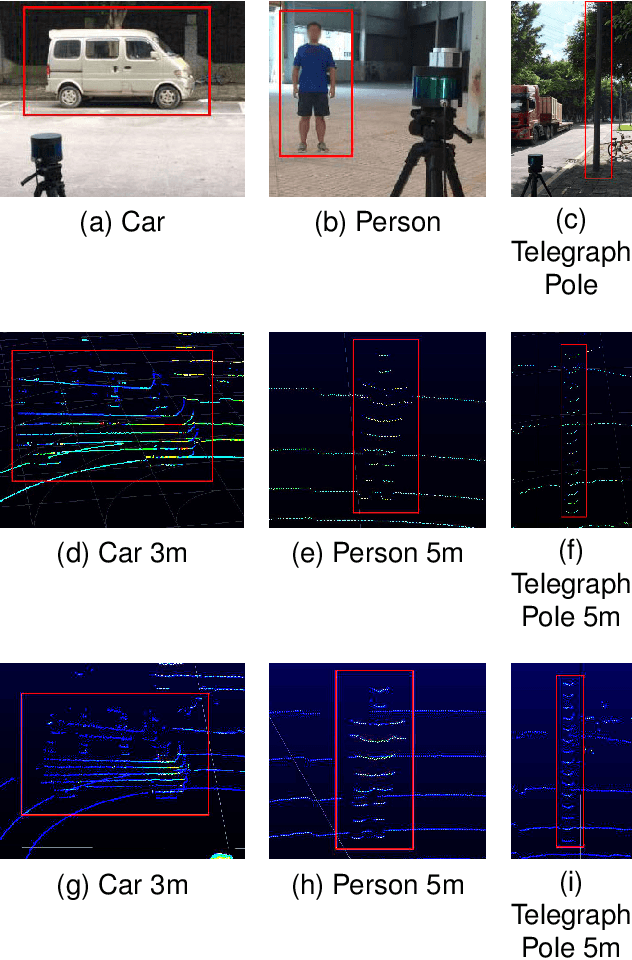
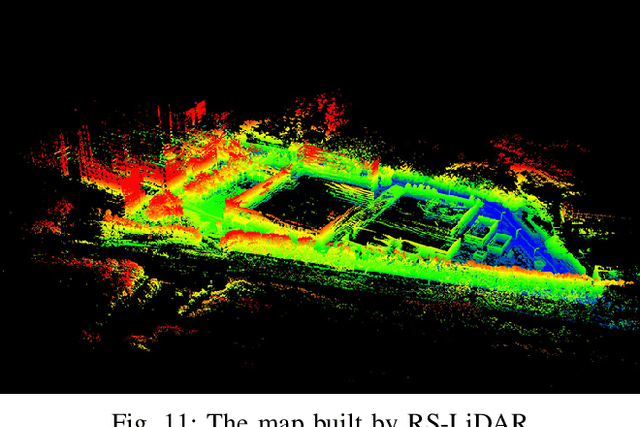
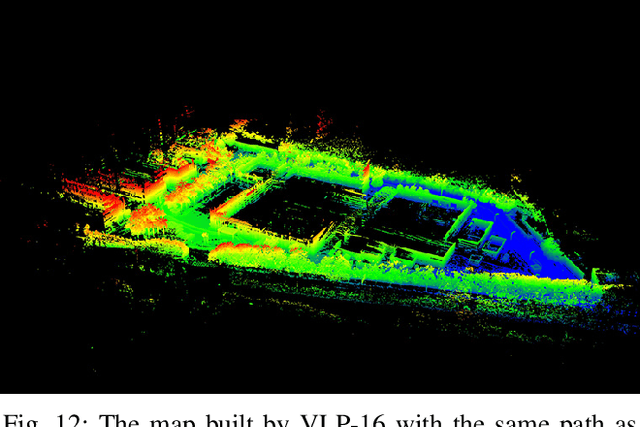
High precision 3D LiDARs are still expensive and hard to acquire. This paper presents the characteristics of RS-LiDAR, a model of low-cost LiDAR with sufficient supplies, in comparison with VLP-16. The paper also provides a set of evaluations to analyze the characterizations and performances of LiDARs sensors. This work analyzes multiple properties, such as drift effects, distance effects, color effects and sensor orientation effects, in the context of 3D perception. By comparing with Velodyne LiDAR, we found RS-LiDAR as a cheaper and acquirable substitute of VLP-16 with similar efficiency.
Extrinsic Calibration of 3D Range Finder and Camera without Auxiliary Object or Human Intervention
Mar 02, 2017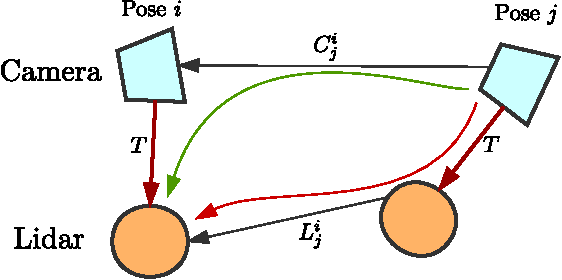
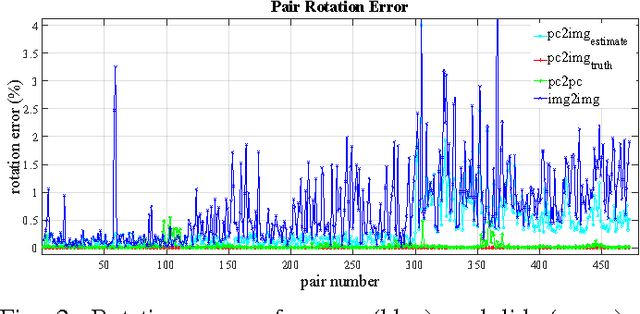
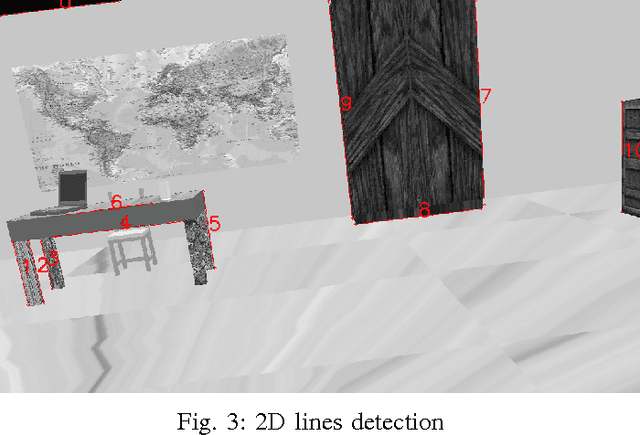
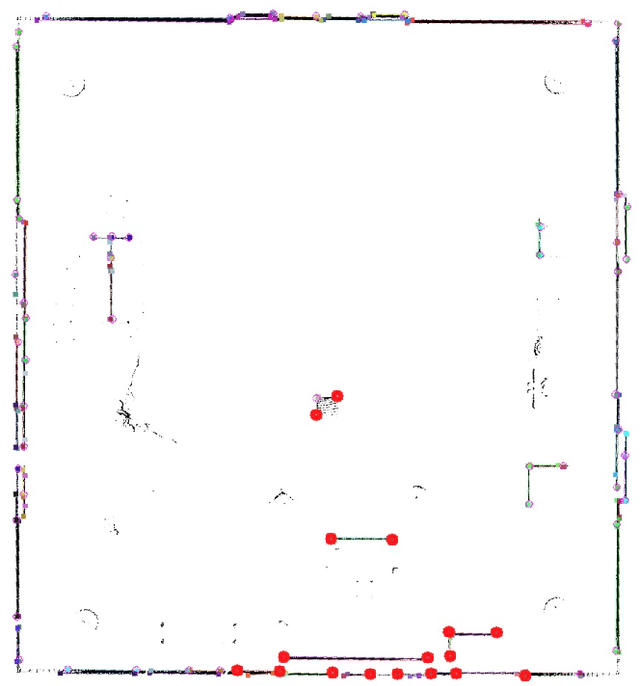
Fusion of heterogeneous extroceptive sensors is the most effient and effective way to representing the environment precisely, as it overcomes various defects of each homogeneous sensor. The rigid transformation (aka. extrinsic parameters) of heterogeneous sensory systems should be available before precisely fusing the multisensor information. Researchers have proposed several approaches to estimating the extrinsic parameters. These approaches require either auxiliary objects, like chessboards, or extra help from human to select correspondences. In this paper, we proposed a novel extrinsic calibration approach for the extrinsic calibration of range and image sensors. As far as we know, it is the first automatic approach with no requirement of auxiliary objects or any human interventions. First, we estimate the initial extrinsic parameters from the individual motion of the range finder and the camera. Then we extract lines in the image and point-cloud pairs, to refine the line feature associations by the initial extrinsic parameters. At the end, we discussed the degenerate case which may lead to the algorithm failure and validate our approach by simulation. The results indicate high-precision extrinsic calibration results against the ground-truth.