 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtrinsic Calibration of 3D Range Finder and Camera without Auxiliary Object or Human Intervention
Paper and Code
Mar 02, 2017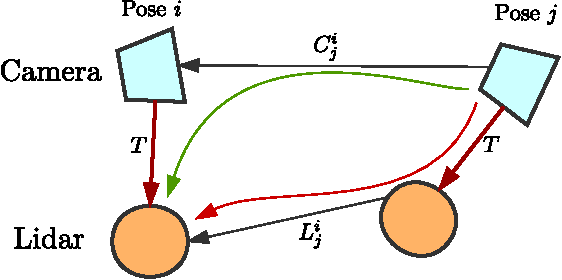
Fusion of heterogeneous extroceptive sensors is the most effient and effective way to representing the environment precisely, as it overcomes various defects of each homogeneous sensor. The rigid transformation (aka. extrinsic parameters) of heterogeneous sensory systems should be available before precisely fusing the multisensor information. Researchers have proposed several approaches to estimating the extrinsic parameters. These approaches require either auxiliary objects, like chessboards, or extra help from human to select correspondences. In this paper, we proposed a novel extrinsic calibration approach for the extrinsic calibration of range and image sensors. As far as we know, it is the first automatic approach with no requirement of auxiliary objects or any human interventions. First, we estimate the initial extrinsic parameters from the individual motion of the range finder and the camera. Then we extract lines in the image and point-cloud pairs, to refine the line feature associations by the initial extrinsic parameters. At the end, we discussed the degenerate case which may lead to the algorithm failure and validate our approach by simulation. The results indicate high-precision extrinsic calibration results against the ground-truth.