Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCharacterization of a RS-LiDAR for 3D Perception
Paper and Code
Sep 22, 2017
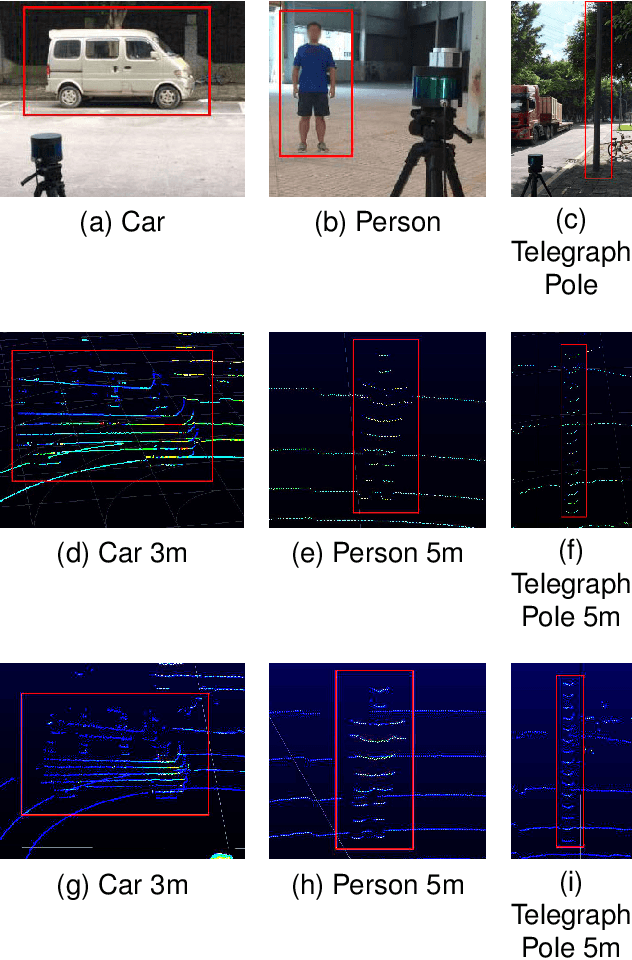
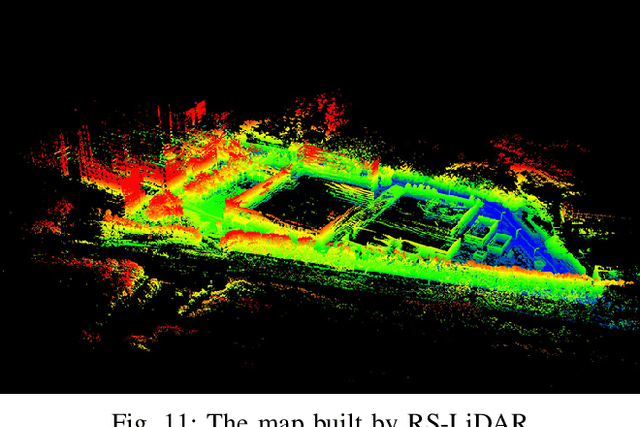
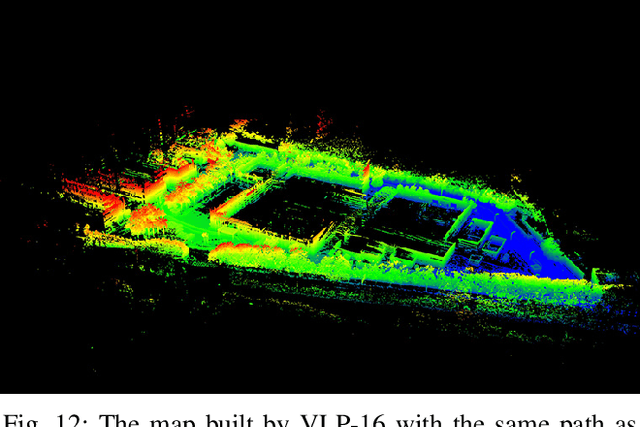
High precision 3D LiDARs are still expensive and hard to acquire. This paper presents the characteristics of RS-LiDAR, a model of low-cost LiDAR with sufficient supplies, in comparison with VLP-16. The paper also provides a set of evaluations to analyze the characterizations and performances of LiDARs sensors. This work analyzes multiple properties, such as drift effects, distance effects, color effects and sensor orientation effects, in the context of 3D perception. By comparing with Velodyne LiDAR, we found RS-LiDAR as a cheaper and acquirable substitute of VLP-16 with similar efficiency.
* For ICRA2018
View paper on