 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpace-Time-Frequency Synthetic Integrated Sensing and Communication Networks
Nov 19, 2025Integrated sensing and communication (ISAC) promises high spectral and power efficiencies by sharing waveforms, spectrum, and hardware across sensing and data links. Yet commercial cellular networks struggle to deliver fine angular, range, and Doppler resolution due to limited aperture, bandwidth, and coherent observation time. In this paper, we propose a space-time-frequency synthetic ISAC architecture that fuses observations from distributed transmitters and receivers across time intervals and frequency bands. We develop a unified signal model for multistatic and monostatic configurations, derive Cramer-Rao lower bounds (CRLBs) for the estimations of position and velocity. The analysis shows how spatial diversity, multiband operation, and observation scheduling impact the Fisher information. We also compare the estimation performance between a concentrated maximum likelihood estimator (MLE) and a two stage information fusion (TSIF) method that first estimates per-path delay and radial speed and then fuses them by solving a weighted nonlinear least-squares problem via the Gauss-Newton algorithm. Numerical results show that MLE approaches the CRLB in the high signal-to-noise ratio (SNR) regime, while the two stage method remains competitive at moderate to high SNR but degrades at low SNR. A central finding is that fully synthesized network processing is essential, as estimations by individual base stations (BSs) followed by fusion are consistently inferior and unstable at low SNR. This framework offers a practical guidance for upgrading existing communication infrastructure into dense sensing networks.
Continuous-Time Value Iteration for Multi-Agent Reinforcement Learning
Sep 11, 2025
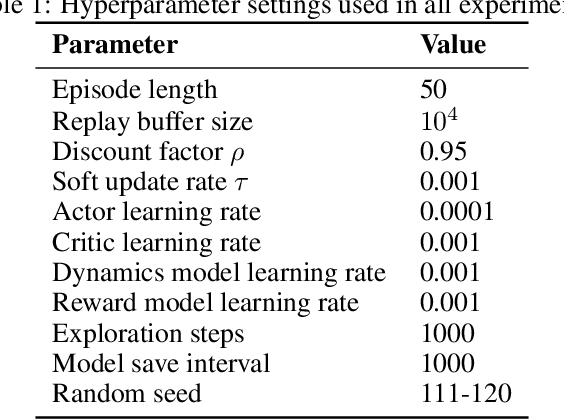
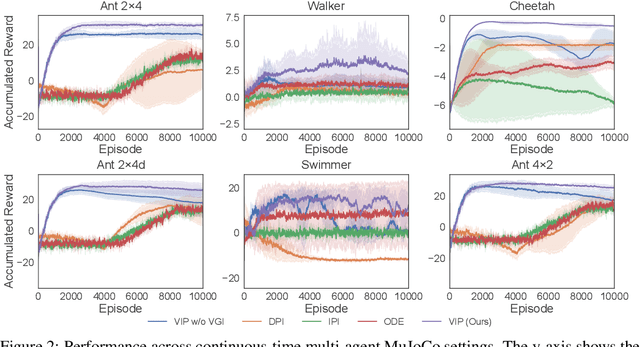

Existing reinforcement learning (RL) methods struggle with complex dynamical systems that demand interactions at high frequencies or irregular time intervals. Continuous-time RL (CTRL) has emerged as a promising alternative by replacing discrete-time Bellman recursion with differential value functions defined as viscosity solutions of the Hamilton--Jacobi--Bellman (HJB) equation. While CTRL has shown promise, its applications have been largely limited to the single-agent domain. This limitation stems from two key challenges: (i) conventional solution methods for HJB equations suffer from the curse of dimensionality (CoD), making them intractable in high-dimensional systems; and (ii) even with HJB-based learning approaches, accurately approximating centralized value functions in multi-agent settings remains difficult, which in turn destabilizes policy training. In this paper, we propose a CT-MARL framework that uses physics-informed neural networks (PINNs) to approximate HJB-based value functions at scale. To ensure the value is consistent with its differential structure, we align value learning with value-gradient learning by introducing a Value Gradient Iteration (VGI) module that iteratively refines value gradients along trajectories. This improves gradient fidelity, in turn yielding more accurate values and stronger policy learning. We evaluate our method using continuous-time variants of standard benchmarks, including multi-agent particle environment (MPE) and multi-agent MuJoCo. Our results demonstrate that our approach consistently outperforms existing continuous-time RL baselines and scales to complex multi-agent dynamics.
Pushing DSP-Free Coherent Interconnect to the Last Inch by Optically Analog Signal Processing
Mar 14, 2025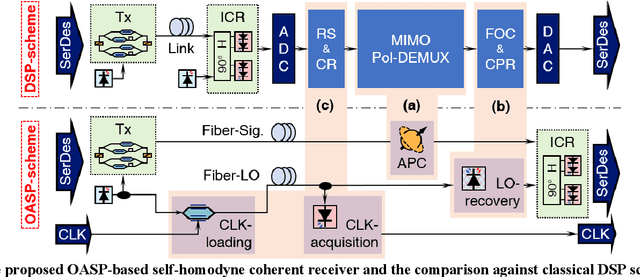
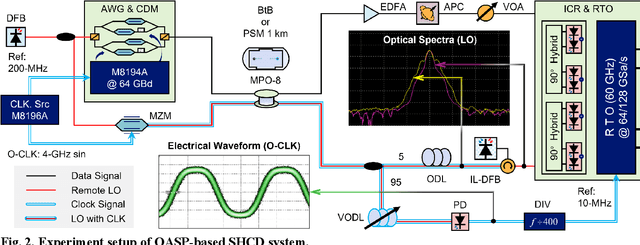
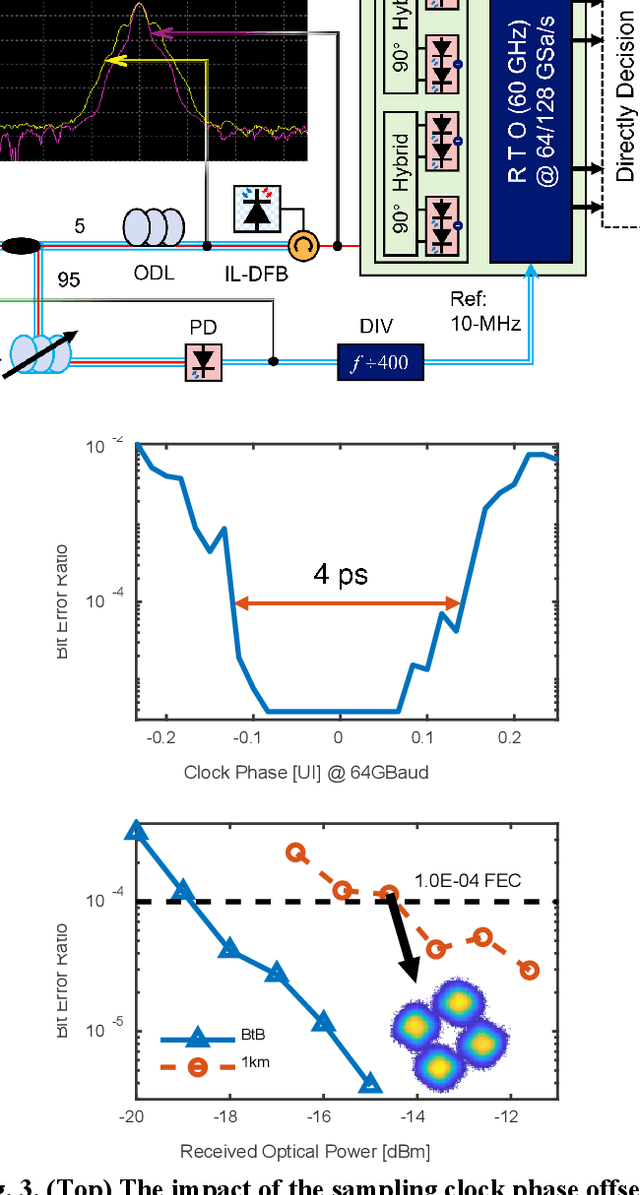
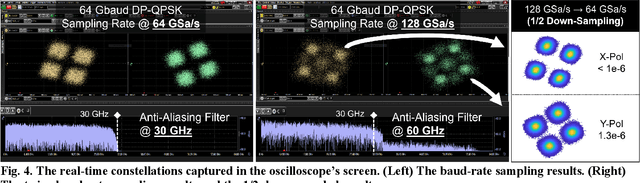
To support the boosting interconnect capacity of the AI-related data centers, novel techniques enabled high-speed and low-cost optics are continuously emerging. When the baud rate approaches 200 GBaud per lane, the bottle-neck of traditional intensity modulation direct detection (IM-DD) architectures becomes increasingly evident. The simplified coherent solutions are widely discussed and considered as one of the most promising candidates. In this paper, a novel coherent architecture based on self-homodyne coherent detection and optically analog signal processing (OASP) is demonstrated. Proved by experiment, the first DSP-free baud-rate sampled 64-GBaud QPSK/16-QAM receptions are achieved, with BERs of 1e-6 and 2e-2, respectively. Even with 1-km fiber link propagation, the BER for QPSK reception remains at 3.6e-6. When an ultra-simple 1-sps SISO filter is utilized, the performance degradation of the proposed scheme is less than 1 dB compared to legacy DSP-based coherent reception. The proposed results pave the way for the ultra-high-speed coherent optical interconnections, offering high power and cost efficiency.
OTFS-ISAC System with Sub-Nyquist ADC Sampling Rate
Feb 07, 2025



Integrated sensing and communication (ISAC) has emerged as a pivotal technology for next-generation wireless communication and radar systems, enabling high-resolution sensing and high-throughput communication with shared spectrum and hardware. However, achieving a fine radar resolution often requires high-rate analog-to-digital converters (ADCs) and substantial storage, making it both expensive and impractical for many commercial applications. To address these challenges, this paper proposes an orthogonal time frequency space (OTFS)-based ISAC architecture that operates at reduced ADC sampling rates, yet preserves accurate radar estimation and supports simultaneous communication. The proposed architecture introduces pilot symbols directly in the delay-Doppler (DD) domain to leverage the transformation mapping between the DD and time-frequency (TF) domains to keep selected subcarriers active while others are inactive, allowing the radar receiver to exploit under-sampling aliasing and recover the original DD signal at much lower sampling rates. To further enhance the radar accuracy, we develop an iterative interference estimation and cancellation algorithm that mitigates data symbol interference. We propose a code-based spreading technique that distributes data across the DD domain to preserve the maximum unambiguous radar sensing range. For communication, we implement a complete transceiver pipeline optimized for reduced sampling rate system, including synchronization, channel estimation, and iterative data detection. Experimental results from a software-defined radio (SDR)-based testbed confirm that our method substantially lowers the required sampling rate without sacrificing radar sensing performance and ensures reliable communication.
DeepSafeMPC: Deep Learning-Based Model Predictive Control for Safe Multi-Agent Reinforcement Learning
Mar 12, 2024



Safe Multi-agent reinforcement learning (safe MARL) has increasingly gained attention in recent years, emphasizing the need for agents to not only optimize the global return but also adhere to safety requirements through behavioral constraints. Some recent work has integrated control theory with multi-agent reinforcement learning to address the challenge of ensuring safety. However, there have been only very limited applications of Model Predictive Control (MPC) methods in this domain, primarily due to the complex and implicit dynamics characteristic of multi-agent environments. To bridge this gap, we propose a novel method called Deep Learning-Based Model Predictive Control for Safe Multi-Agent Reinforcement Learning (DeepSafeMPC). The key insight of DeepSafeMPC is leveraging a entralized deep learning model to well predict environmental dynamics. Our method applies MARL principles to search for optimal solutions. Through the employment of MPC, the actions of agents can be restricted within safe states concurrently. We demonstrate the effectiveness of our approach using the Safe Multi-agent MuJoCo environment, showcasing significant advancements in addressing safety concerns in MARL.
NLP-based detection of systematic anomalies among the narratives of consumer complaints
Aug 22, 2023



We develop an NLP-based procedure for detecting systematic nonmeritorious consumer complaints, simply called systematic anomalies, among complaint narratives. While classification algorithms are used to detect pronounced anomalies, in the case of smaller and frequent systematic anomalies, the algorithms may falter due to a variety of reasons, including technical ones as well as natural limitations of human analysts. Therefore, as the next step after classification, we convert the complaint narratives into quantitative data, which are then analyzed using an algorithm for detecting systematic anomalies. We illustrate the entire procedure using complaint narratives from the Consumer Complaint Database of the Consumer Financial Protection Bureau.
AC2C: Adaptively Controlled Two-Hop Communication for Multi-Agent Reinforcement Learning
Feb 24, 2023



Learning communication strategies in cooperative multi-agent reinforcement learning (MARL) has recently attracted intensive attention. Early studies typically assumed a fully-connected communication topology among agents, which induces high communication costs and may not be feasible. Some recent works have developed adaptive communication strategies to reduce communication overhead, but these methods cannot effectively obtain valuable information from agents that are beyond the communication range. In this paper, we consider a realistic communication model where each agent has a limited communication range, and the communication topology dynamically changes. To facilitate effective agent communication, we propose a novel communication protocol called Adaptively Controlled Two-Hop Communication (AC2C). After an initial local communication round, AC2C employs an adaptive two-hop communication strategy to enable long-range information exchange among agents to boost performance, which is implemented by a communication controller. This controller determines whether each agent should ask for two-hop messages and thus helps to reduce the communication overhead during distributed execution. We evaluate AC2C on three cooperative multi-agent tasks, and the experimental results show that it outperforms relevant baselines with lower communication costs.
TENET: Transformer Encoding Network for Effective Temporal Flow on Motion Prediction
Jun 30, 2022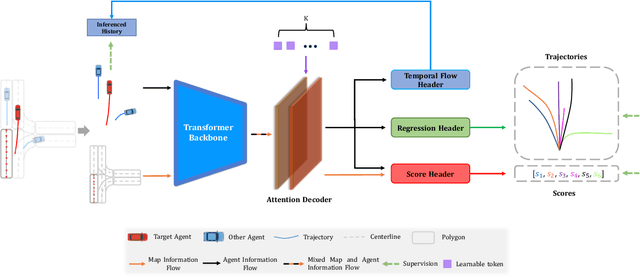

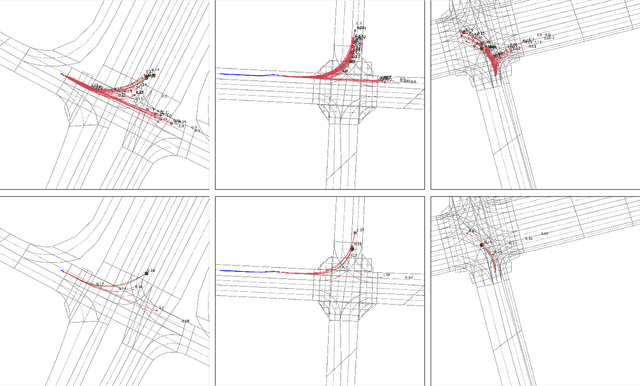
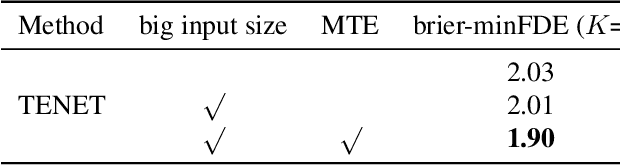
This technical report presents an effective method for motion prediction in autonomous driving. We develop a Transformer-based method for input encoding and trajectory prediction. Besides, we propose the Temporal Flow Header to enhance the trajectory encoding. In the end, an efficient K-means ensemble method is used. Using our Transformer network and ensemble method, we win the first place of Argoverse 2 Motion Forecasting Challenge with the state-of-the-art brier-minFDE score of 1.90.