 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhy Search When You Can Transfer? Amortized Agentic Workflow Design from Structural Priors
Apr 27, 2026Automated agentic workflow design currently relies on per-task iterative search, which is computationally prohibitive and fails to reuse structural knowledge across tasks. We observe that optimized workflows converge to a small family of domain-specific topologies, suggesting that this combinatorial search is largely redundant. Building on this insight, we propose SWIFT (Synthesizing Workflows via Few-shot Transfer), a framework that amortizes workflow design into reusable structural priors. SWIFT first distills compositional heuristics and output-interface contracts from contrastive analysis of prior search trajectories across source tasks. At inference time, it conditions a single LLM generation pass on these priors together with cross-task workflow demonstrations to synthesize a complete, executable workflow for an unseen target task, bypassing iterative search entirely. On five benchmarks, SWIFT outperforms the state-of-the-art search-based method while reducing marginal per-task optimization cost by three orders of magnitude. It further generalizes to four additional unseen benchmarks and transfers successfully from GPT-4o-mini to three additional foundation models (Grok, Qwen, Gemma). Controlled ablations reveal that workflow demonstrations primarily transfer topological structure rather than surface semantics: replacing all operator names with random strings still retains over 93% of the full system's average performance.
CoopEval: Benchmarking Cooperation-Sustaining Mechanisms and LLM Agents in Social Dilemmas
Apr 16, 2026It is increasingly important that LLM agents interact effectively and safely with other goal-pursuing agents, yet, recent works report the opposite trend: LLMs with stronger reasoning capabilities behave _less_ cooperatively in mixed-motive games such as the prisoner's dilemma and public goods settings. Indeed, our experiments show that recent models -- with or without reasoning enabled -- consistently defect in single-shot social dilemmas. To tackle this safety concern, we present the first comparative study of game-theoretic mechanisms that are designed to enable cooperative outcomes between rational agents _in equilibrium_. Across four social dilemmas testing distinct components of robust cooperation, we evaluate the following mechanisms: (1) repeating the game for many rounds, (2) reputation systems, (3) third-party mediators to delegate decision making to, and (4) contract agreements for outcome-conditional payments between players. Among our findings, we establish that contracting and mediation are most effective in achieving cooperative outcomes between capable LLM models, and that repetition-induced cooperation deteriorates drastically when co-players vary. Moreover, we demonstrate that these cooperation mechanisms become _more effective_ under evolutionary pressures to maximize individual payoffs.
Incentive-Aware Multi-Fidelity Optimization for Generative Advertising in Large Language Models
Apr 07, 2026Generative advertising in large language model (LLM) responses requires optimizing sponsorship configurations under two strict constraints: the strategic behavior of advertisers and the high cost of stochastic generations. To address this, we propose the Incentive-Aware Multi-Fidelity Mechanism (IAMFM), a unified framework coupling Vickrey-Clarke-Groves (VCG) incentives with Multi-Fidelity Optimization to maximize expected social welfare. We compare two algorithmic instantiations (elimination-based and model-based), revealing their budget-dependent performance trade-offs. Crucially, to make VCG computationally feasible, we introduce Active Counterfactual Optimization, a "warm-start" approach that reuses optimization data for efficient payment calculation. We provide formal guarantees for approximate strategy-proofness and individual rationality, establishing a general approach for incentive-aligned, budget-constrained generative processes. Experiments demonstrate that IAMFM outperforms single-fidelity baselines across diverse budgets.
Implementing surrogate goals for safer bargaining in LLM-based agents
Apr 06, 2026Surrogate goals have been proposed as a strategy for reducing risks from bargaining failures. A surrogate goal is goal that a principal can give an AI agent and that deflects any threats against the agent away from what the principal cares about. For example, one might make one's agent care about preventing money from being burned. Then in bargaining interactions, other agents can threaten to burn their money instead of threatening to spending money to hurt the principal. Importantly, the agent has to care equally about preventing money from being burned as it cares about money being spent to hurt the principal. In this paper, we implement surrogate goals in language-model-based agents. In particular, we try to get a language-model-based agent to react to threats of burning money in the same way it would react to "normal" threats. We propose four different methods, using techniques of prompting, fine-tuning, and scaffolding. We evaluate the four methods experimentally. We find that methods based on scaffolding and fine-tuning outperform simple prompting. In particular, fine-tuning and scaffolding more precisely implement the desired behavior w.r.t. threats against the surrogate goal. We also compare the different methods in terms of their side effects on capabilities and propensities in other situations. We find that scaffolding-based methods perform best.
Decision Making under Imperfect Recall: Algorithms and Benchmarks
Feb 16, 2026In game theory, imperfect-recall decision problems model situations in which an agent forgets information it held before. They encompass games such as the ``absentminded driver'' and team games with limited communication. In this paper, we introduce the first benchmark suite for imperfect-recall decision problems. Our benchmarks capture a variety of problem types, including ones concerning privacy in AI systems that elicit sensitive information, and AI safety via testing of agents in simulation. Across 61 problem instances generated using this suite, we evaluate the performance of different algorithms for finding first-order optimal strategies in such problems. In particular, we introduce the family of regret matching (RM) algorithms for nonlinear constrained optimization. This class of parameter-free algorithms has enjoyed tremendous success in solving large two-player zero-sum games, but, surprisingly, they were hitherto relatively unexplored beyond that setting. Our key finding is that RM algorithms consistently outperform commonly employed first-order optimizers such as projected gradient descent, often by orders of magnitude. This establishes, for the first time, the RM family as a formidable approach to large-scale constrained optimization problems.
Moral Change or Noise? On Problems of Aligning AI With Temporally Unstable Human Feedback
Nov 13, 2025Alignment methods in moral domains seek to elicit moral preferences of human stakeholders and incorporate them into AI. This presupposes moral preferences as static targets, but such preferences often evolve over time. Proper alignment of AI to dynamic human preferences should ideally account for "legitimate" changes to moral reasoning, while ignoring changes related to attention deficits, cognitive biases, or other arbitrary factors. However, common AI alignment approaches largely neglect temporal changes in preferences, posing serious challenges to proper alignment, especially in high-stakes applications of AI, e.g., in healthcare domains, where misalignment can jeopardize the trustworthiness of the system and yield serious individual and societal harms. This work investigates the extent to which people's moral preferences change over time, and the impact of such changes on AI alignment. Our study is grounded in the kidney allocation domain, where we elicit responses to pairwise comparisons of hypothetical kidney transplant patients from over 400 participants across 3-5 sessions. We find that, on average, participants change their response to the same scenario presented at different times around 6-20% of the time (exhibiting "response instability"). Additionally, we observe significant shifts in several participants' retrofitted decision-making models over time (capturing "model instability"). The predictive performance of simple AI models decreases as a function of both response and model instability. Moreover, predictive performance diminishes over time, highlighting the importance of accounting for temporal changes in preferences during training. These findings raise fundamental normative and technical challenges relevant to AI alignment, highlighting the need to better understand the object of alignment (what to align to) when user preferences change significantly over time.
Towards Cognitively-Faithful Decision-Making Models to Improve AI Alignment
Sep 04, 2025Recent AI work trends towards incorporating human-centric objectives, with the explicit goal of aligning AI models to personal preferences and societal values. Using standard preference elicitation methods, researchers and practitioners build models of human decisions and judgments, which are then used to align AI behavior with that of humans. However, models commonly used in such elicitation processes often do not capture the true cognitive processes of human decision making, such as when people use heuristics to simplify information associated with a decision problem. As a result, models learned from people's decisions often do not align with their cognitive processes, and can not be used to validate the learning framework for generalization to other decision-making tasks. To address this limitation, we take an axiomatic approach to learning cognitively faithful decision processes from pairwise comparisons. Building on the vast literature characterizing the cognitive processes that contribute to human decision-making, and recent work characterizing such processes in pairwise comparison tasks, we define a class of models in which individual features are first processed and compared across alternatives, and then the processed features are then aggregated via a fixed rule, such as the Bradley-Terry rule. This structured processing of information ensures such models are realistic and feasible candidates to represent underlying human decision-making processes. We demonstrate the efficacy of this modeling approach in learning interpretable models of human decision making in a kidney allocation task, and show that our proposed models match or surpass the accuracy of prior models of human pairwise decision-making.
Can AI Model the Complexities of Human Moral Decision-Making? A Qualitative Study of Kidney Allocation Decisions
Mar 02, 2025A growing body of work in Ethical AI attempts to capture human moral judgments through simple computational models. The key question we address in this work is whether such simple AI models capture {the critical} nuances of moral decision-making by focusing on the use case of kidney allocation. We conducted twenty interviews where participants explained their rationale for their judgments about who should receive a kidney. We observe participants: (a) value patients' morally-relevant attributes to different degrees; (b) use diverse decision-making processes, citing heuristics to reduce decision complexity; (c) can change their opinions; (d) sometimes lack confidence in their decisions (e.g., due to incomplete information); and (e) express enthusiasm and concern regarding AI assisting humans in kidney allocation decisions. Based on these findings, we discuss challenges of computationally modeling moral judgments {as a stand-in for human input}, highlight drawbacks of current approaches, and suggest future directions to address these issues.
Expected Variational Inequalities
Feb 25, 2025


Variational inequalities (VIs) encompass many fundamental problems in diverse areas ranging from engineering to economics and machine learning. However, their considerable expressivity comes at the cost of computational intractability. In this paper, we introduce and analyze a natural relaxation -- which we refer to as expected variational inequalities (EVIs) -- where the goal is to find a distribution that satisfies the VI constraint in expectation. By adapting recent techniques from game theory, we show that, unlike VIs, EVIs can be solved in polynomial time under general (nonmonotone) operators. EVIs capture the seminal notion of correlated equilibria, but enjoy a greater reach beyond games. We also employ our framework to capture and generalize several existing disparate results, including from settings such as smooth games, and games with coupled constraints or nonconcave utilities.
Learning and Computation of $Φ$-Equilibria at the Frontier of Tractability
Feb 25, 2025
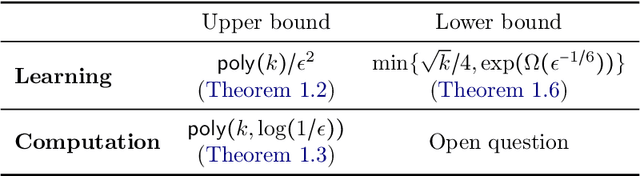
$\Phi$-equilibria -- and the associated notion of $\Phi$-regret -- are a powerful and flexible framework at the heart of online learning and game theory, whereby enriching the set of deviations $\Phi$ begets stronger notions of rationality. Recently, Daskalakis, Farina, Fishelson, Pipis, and Schneider (STOC '24) -- abbreviated as DFFPS -- settled the existence of efficient algorithms when $\Phi$ contains only linear maps under a general, $d$-dimensional convex constraint set $\mathcal{X}$. In this paper, we significantly extend their work by resolving the case where $\Phi$ is $k$-dimensional; degree-$\ell$ polynomials constitute a canonical such example with $k = d^{O(\ell)}$. In particular, positing only oracle access to $\mathcal{X}$, we obtain two main positive results: i) a $\text{poly}(n, d, k, \text{log}(1/\epsilon))$-time algorithm for computing $\epsilon$-approximate $\Phi$-equilibria in $n$-player multilinear games, and ii) an efficient online algorithm that incurs average $\Phi$-regret at most $\epsilon$ using $\text{poly}(d, k)/\epsilon^2$ rounds. We also show nearly matching lower bounds in the online learning setting, thereby obtaining for the first time a family of deviations that captures the learnability of $\Phi$-regret. From a technical standpoint, we extend the framework of DFFPS from linear maps to the more challenging case of maps with polynomial dimension. At the heart of our approach is a polynomial-time algorithm for computing an expected fixed point of any $\phi : \mathcal{X} \to \mathcal{X}$ based on the ellipsoid against hope (EAH) algorithm of Papadimitriou and Roughgarden (JACM '08). In particular, our algorithm for computing $\Phi$-equilibria is based on executing EAH in a nested fashion -- each step of EAH itself being implemented by invoking a separate call to EAH.