 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModality Invariant Multimodal Learning to Handle Missing Modalities: A Single-Branch Approach
Aug 14, 2024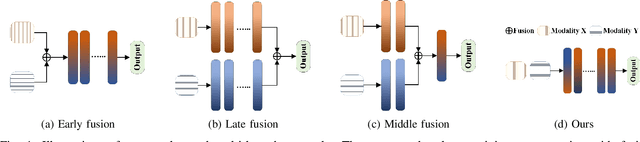
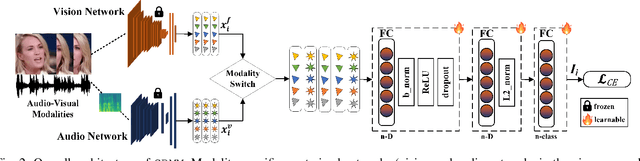


Multimodal networks have demonstrated remarkable performance improvements over their unimodal counterparts. Existing multimodal networks are designed in a multi-branch fashion that, due to the reliance on fusion strategies, exhibit deteriorated performance if one or more modalities are missing. In this work, we propose a modality invariant multimodal learning method, which is less susceptible to the impact of missing modalities. It consists of a single-branch network sharing weights across multiple modalities to learn inter-modality representations to maximize performance as well as robustness to missing modalities. Extensive experiments are performed on four challenging datasets including textual-visual (UPMC Food-101, Hateful Memes, Ferramenta) and audio-visual modalities (VoxCeleb1). Our proposed method achieves superior performance when all modalities are present as well as in the case of missing modalities during training or testing compared to the existing state-of-the-art methods.
Chameleon: Images Are What You Need For Multimodal Learning Robust To Missing Modalities
Jul 23, 2024Multimodal learning has demonstrated remarkable performance improvements over unimodal architectures. However, multimodal learning methods often exhibit deteriorated performances if one or more modalities are missing. This may be attributed to the commonly used multi-branch design containing modality-specific streams making the models reliant on the availability of a complete set of modalities. In this work, we propose a robust textual-visual multimodal learning method, Chameleon, that completely deviates from the conventional multi-branch design. To enable this, we present the unification of input modalities into one format by encoding textual modality into visual representations. As a result, our approach does not require modality-specific branches to learn modality-independent multimodal representations making it robust to missing modalities. Extensive experiments are performed on four popular challenging datasets including Hateful Memes, UPMC Food-101, MM-IMDb, and Ferramenta. Chameleon not only achieves superior performance when all modalities are present at train/test time but also demonstrates notable resilience in the case of missing modalities.
Dataset Condensation with Latent Quantile Matching
Jun 14, 2024Dataset condensation (DC) methods aim to learn a smaller synthesized dataset with informative data records to accelerate the training of machine learning models. Current distribution matching (DM) based DC methods learn a synthesized dataset by matching the mean of the latent embeddings between the synthetic and the real dataset. However two distributions with the same mean can still be vastly different. In this work we demonstrate the shortcomings of using Maximum Mean Discrepancy to match latent distributions i.e. the weak matching power and lack of outlier regularization. To alleviate these shortcomings we propose our new method: Latent Quantile Matching (LQM) which matches the quantiles of the latent embeddings to minimize the goodness of fit test statistic between two distributions. Empirical experiments on both image and graph-structured datasets show that LQM matches or outperforms previous state of the art in distribution matching based DC. Moreover we show that LQM improves the performance in continual graph learning (CGL) setting where memory efficiency and privacy can be important. Our work sheds light on the application of DM based DC for CGL.
Benchmarking Sensitivity of Continual Graph Learning for Skeleton-Based Action Recognition
Jan 31, 2024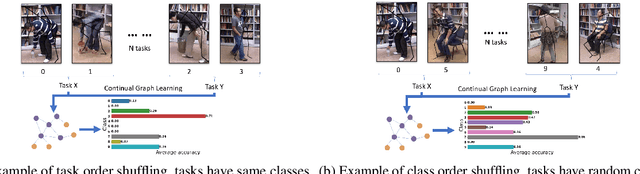

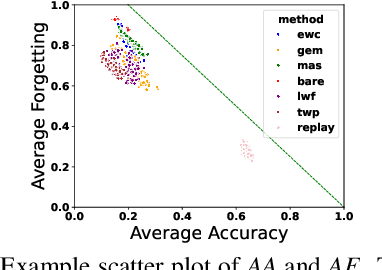

Continual learning (CL) is the research field that aims to build machine learning models that can accumulate knowledge continuously over different tasks without retraining from scratch. Previous studies have shown that pre-training graph neural networks (GNN) may lead to negative transfer (Hu et al., 2020) after fine-tuning, a setting which is closely related to CL. Thus, we focus on studying GNN in the continual graph learning (CGL) setting. We propose the first continual graph learning benchmark for spatio-temporal graphs and use it to benchmark well-known CGL methods in this novel setting. The benchmark is based on the N-UCLA and NTU-RGB+D datasets for skeleton-based action recognition. Beyond benchmarking for standard performance metrics, we study the class and task-order sensitivity of CGL methods, i.e., the impact of learning order on each class/task's performance, and the architectural sensitivity of CGL methods with backbone GNN at various widths and depths. We reveal that task-order robust methods can still be class-order sensitive and observe results that contradict previous empirical observations on architectural sensitivity in CL.
Inferring the relationship between soil temperature and the normalized difference vegetation index with machine learning
Dec 19, 2023



Changes in climate can greatly affect the phenology of plants, which can have important feedback effects, such as altering the carbon cycle. These phenological feedback effects are often induced by a shift in the start or end dates of the growing season of plants. The normalized difference vegetation index (NDVI) serves as a straightforward indicator for assessing the presence of green vegetation and can also provide an estimation of the plants' growing season. In this study, we investigated the effect of soil temperature on the timing of the start of the season (SOS), timing of the peak of the season (POS), and the maximum annual NDVI value (PEAK) in subarctic grassland ecosystems between 2014 and 2019. We also explored the impact of other meteorological variables, including air temperature, precipitation, and irradiance, on the inter-annual variation in vegetation phenology. Using machine learning (ML) techniques and SHapley Additive exPlanations (SHAP) values, we analyzed the relative importance and contribution of each variable to the phenological predictions. Our results reveal a significant relationship between soil temperature and SOS and POS, indicating that higher soil temperatures lead to an earlier start and peak of the growing season. However, the Peak NDVI values showed just a slight increase with higher soil temperatures. The analysis of other meteorological variables demonstrated their impacts on the inter-annual variation of the vegetation phenology. Ultimately, this study contributes to our knowledge of the relationships between soil temperature, meteorological variables, and vegetation phenology, providing valuable insights for predicting vegetation phenology characteristics and managing subarctic grasslands in the face of climate change. Additionally, this work provides a solid foundation for future ML-based vegetation phenology studies.
Safety Aware Autonomous Path Planning Using Model Predictive Reinforcement Learning for Inland Waterways
Nov 16, 2023In recent years, interest in autonomous shipping in urban waterways has increased significantly due to the trend of keeping cars and trucks out of city centers. Classical approaches such as Frenet frame based planning and potential field navigation often require tuning of many configuration parameters and sometimes even require a different configuration depending on the situation. In this paper, we propose a novel path planning approach based on reinforcement learning called Model Predictive Reinforcement Learning (MPRL). MPRL calculates a series of waypoints for the vessel to follow. The environment is represented as an occupancy grid map, allowing us to deal with any shape of waterway and any number and shape of obstacles. We demonstrate our approach on two scenarios and compare the resulting path with path planning using a Frenet frame and path planning based on a proximal policy optimization (PPO) agent. Our results show that MPRL outperforms both baselines in both test scenarios. The PPO based approach was not able to reach the goal in either scenario while the Frenet frame approach failed in the scenario consisting of a corner with obstacles. MPRL was able to safely (collision free) navigate to the goal in both of the test scenarios.
Scalability of Message Encoding Techniques for Continuous Communication Learned with Multi-Agent Reinforcement Learning
Aug 09, 2023Many multi-agent systems require inter-agent communication to properly achieve their goal. By learning the communication protocol alongside the action protocol using multi-agent reinforcement learning techniques, the agents gain the flexibility to determine which information should be shared. However, when the number of agents increases we need to create an encoding of the information contained in these messages. In this paper, we investigate the effect of increasing the amount of information that should be contained in a message and increasing the number of agents. We evaluate these effects on two different message encoding methods, the mean message encoder and the attention message encoder. We perform our experiments on a matrix environment. Surprisingly, our results show that the mean message encoder consistently outperforms the attention message encoder. Therefore, we analyse the communication protocol used by the agents that use the mean message encoder and can conclude that the agents use a combination of an exponential and a logarithmic function in their communication policy to avoid the loss of important information after applying the mean message encoder.
An In-Depth Analysis of Discretization Methods for Communication Learning using Backpropagation with Multi-Agent Reinforcement Learning
Aug 09, 2023Communication is crucial in multi-agent reinforcement learning when agents are not able to observe the full state of the environment. The most common approach to allow learned communication between agents is the use of a differentiable communication channel that allows gradients to flow between agents as a form of feedback. However, this is challenging when we want to use discrete messages to reduce the message size, since gradients cannot flow through a discrete communication channel. Previous work proposed methods to deal with this problem. However, these methods are tested in different communication learning architectures and environments, making it hard to compare them. In this paper, we compare several state-of-the-art discretization methods as well as a novel approach. We do this comparison in the context of communication learning using gradients from other agents and perform tests on several environments. In addition, we present COMA-DIAL, a communication learning approach based on DIAL and COMA extended with learning rate scaling and adapted exploration. Using COMA-DIAL allows us to perform experiments on more complex environments. Our results show that the novel ST-DRU method, proposed in this paper, achieves the best results out of all discretization methods across the different environments. It achieves the best or close to the best performance in each of the experiments and is the only method that does not fail on any of the tested environments.
Deep set conditioned latent representations for action recognition
Dec 21, 2022In recent years multi-label, multi-class video action recognition has gained significant popularity. While reasoning over temporally connected atomic actions is mundane for intelligent species, standard artificial neural networks (ANN) still struggle to classify them. In the real world, atomic actions often temporally connect to form more complex composite actions. The challenge lies in recognising composite action of varying durations while other distinct composite or atomic actions occur in the background. Drawing upon the success of relational networks, we propose methods that learn to reason over the semantic concept of objects and actions. We empirically show how ANNs benefit from pretraining, relational inductive biases and unordered set-based latent representations. In this paper we propose deep set conditioned I3D (SCI3D), a two stream relational network that employs latent representation of state and visual representation for reasoning over events and actions. They learn to reason about temporally connected actions in order to identify all of them in the video. The proposed method achieves an improvement of around 1.49% mAP in atomic action recognition and 17.57% mAP in composite action recognition, over a I3D-NL baseline, on the CATER dataset.
* Conference VISAPP 2022, 11 pages,5 figures, 2 Tables, 6 plots
Structured Exploration Through Instruction Enhancement for Object Navigation
Nov 15, 2022



Finding an object of a specific class in an unseen environment remains an unsolved navigation problem. Hence, we propose a hierarchical learning-based method for object navigation. The top-level is capable of high-level planning, and building a memory on a floorplan-level (e.g., which room makes the most sense for the agent to visit next, where has the agent already been?). While the lower-level is tasked with efficiently navigating between rooms and looking for objects in them. Instructions can be provided to the agent using a simple synthetic language. The top-level intelligently enhances the instructions in order to make the overall task more tractable. Language grounding, mapping instructions to visual observations, is performed by utilizing an additional separate supervised trained goal assessment module. We demonstrate the effectiveness of our method on a dynamic configurable domestic environment.