 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Surfel Map-Aided Visual Relocalization with Learned Descriptors
Apr 08, 2021
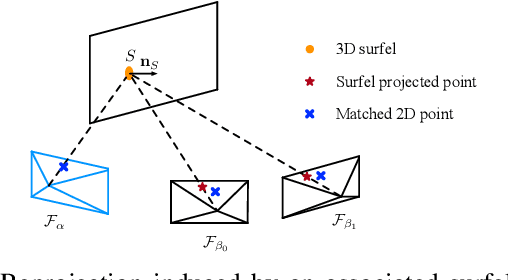


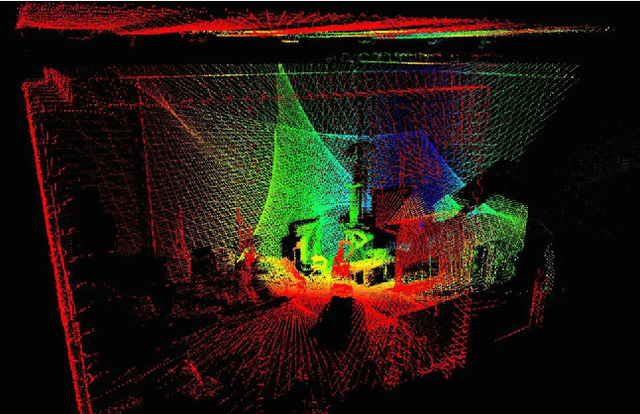
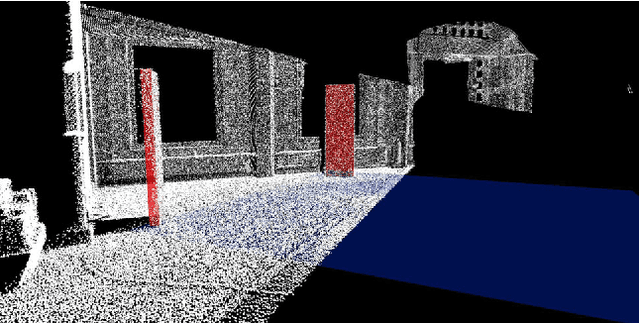
In this paper, we introduce a method for visual relocalization using the geometric information from a 3D surfel map. A visual database is first built by global indices from the 3D surfel map rendering, which provides associations between image points and 3D surfels. Surfel reprojection constraints are utilized to optimize the keyframe poses and map points in the visual database. A hierarchical camera relocalization algorithm then utilizes the visual database to estimate 6-DoF camera poses. Learned descriptors are further used to improve the performance in challenging cases. We present evaluation under real-world conditions and simulation to show the effectiveness and efficiency of our method, and make the final camera poses consistently well aligned with the 3D environment.
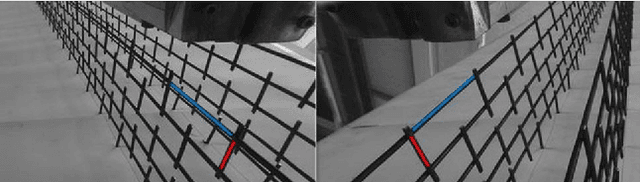
A Fully-Integrated Sensing and Control System for High-Accuracy Mobile Robotic Building Construction
Dec 04, 2019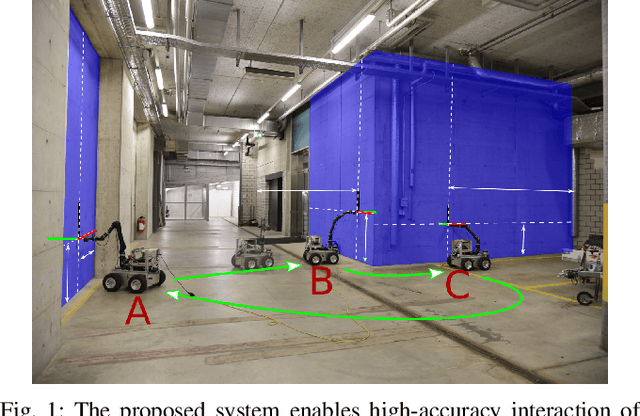
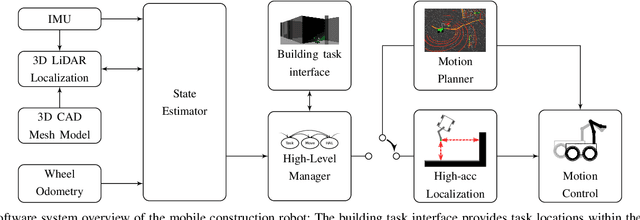
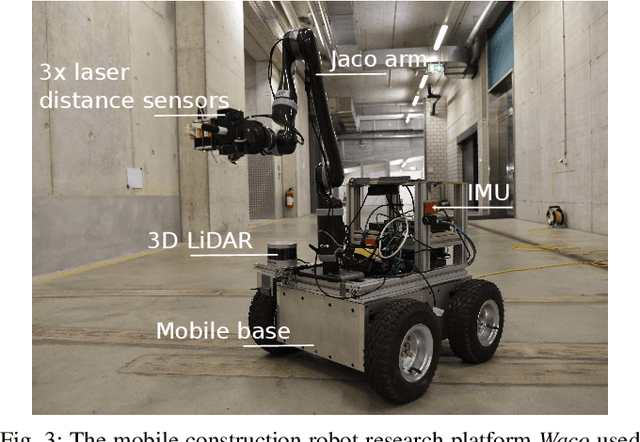
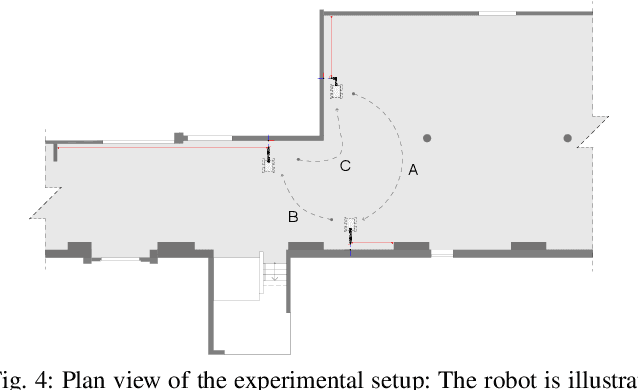
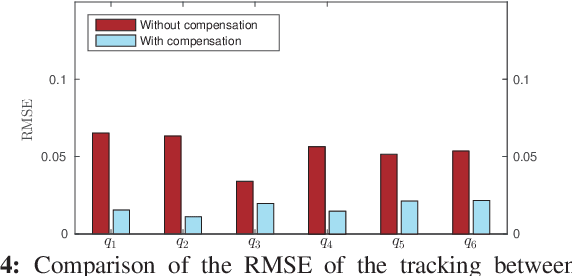
We present a fully-integrated sensing and control system which enables mobile manipulator robots to execute building tasks with millimeter-scale accuracy on building construction sites. The approach leverages multi-modal sensing capabilities for state estimation, tight integration with digital building models, and integrated trajectory planning and whole-body motion control. A novel method for high-accuracy localization updates relative to the known building structure is proposed. The approach is implemented on a real platform and tested under realistic construction conditions. We show that the system can achieve sub-cm end-effector positioning accuracy during fully autonomous operation using solely on-board sensing.
ConFusion: Sensor Fusion for Complex Robotic Systems using Nonlinear Optimization
Mar 01, 2019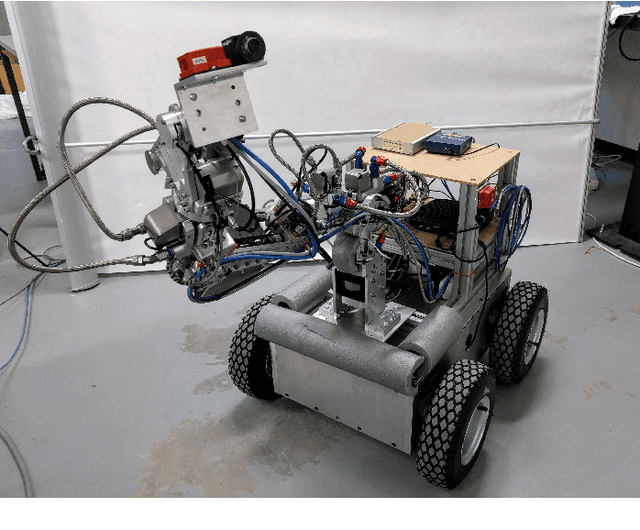
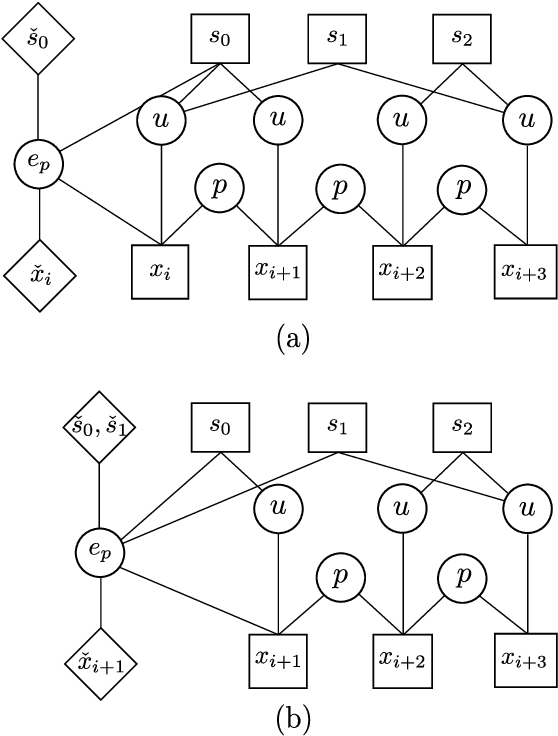
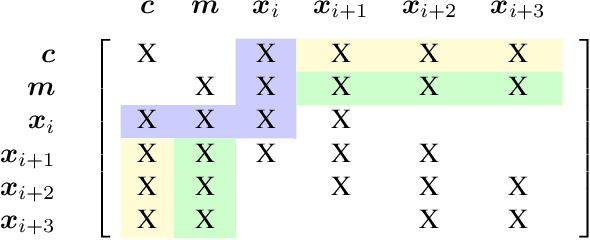
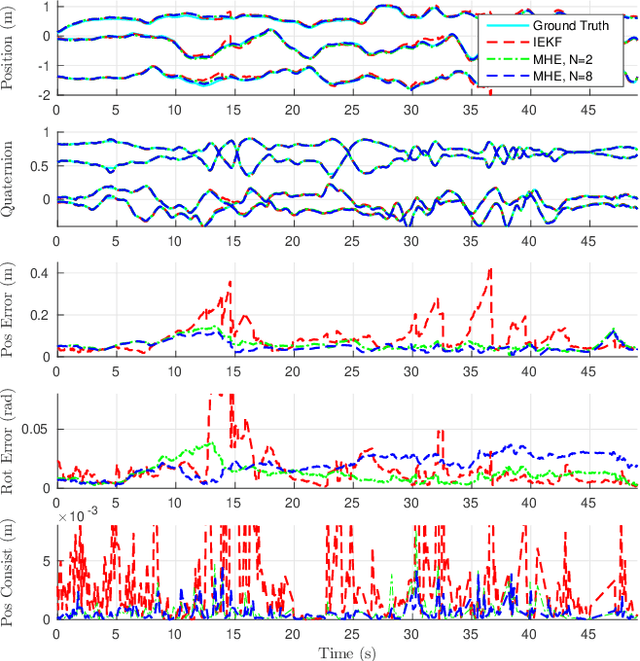
We present ConFusion, an open-source package for online sensor fusion for robotic applications. ConFusion is a modular framework for fusing measurements from many heterogeneous sensors within a moving horizon estimator. ConFusion offers greater flexibility in sensor fusion problem design than filtering-based systems and the ability to scale the online estimate quality with the available computing power. We demonstrate its performance in comparison to an iterated extended Kalman filter in visual-inertial tracking, and show its versatility through whole-body sensor fusion on a mobile manipulator.
Nonlinear disturbance attenuation control of hydraulic robotics
Aug 04, 2018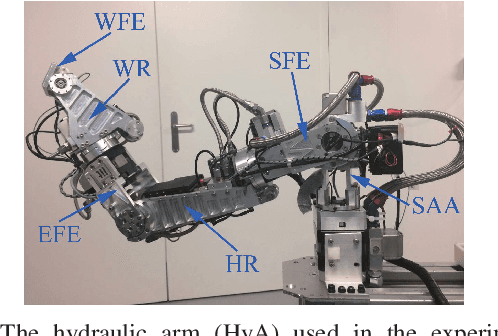
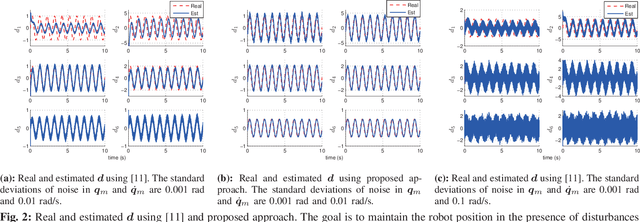
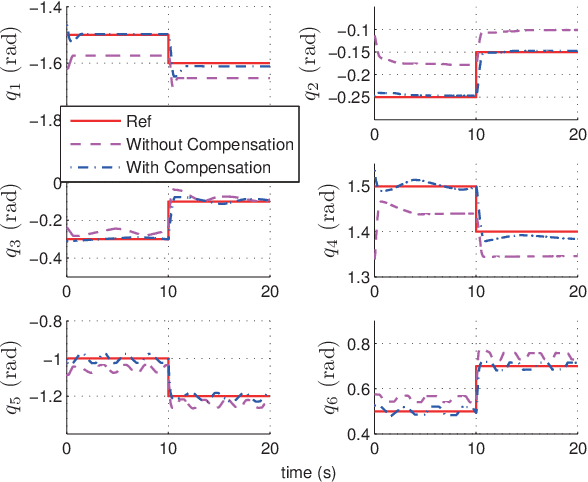
This paper presents a novel nonlinear disturbance rejection control for hydraulic robots. This method requires two third-order filters as well as inverse dynamics in order to estimate the disturbances. All the parameters for the third-order filters are pre-defined. The proposed method is nonlinear, which does not require the linearization of the rigid body dynamics. The estimated disturbances are used by the nonlinear controller in order to achieve disturbance attenuation. The performance of the proposed approach is compared with existing approaches. Finally, the tracking performance and robustness of the proposed approach is validated extensively on real hardware by performing different tasks under either internal or both internal and external disturbances. The experimental results demonstrate the robustness and superior tracking performance of the proposed approach.
Efficient Kinematic Planning for Mobile Manipulators with Non-holonomic Constraints Using Optimal Control
Jan 16, 2018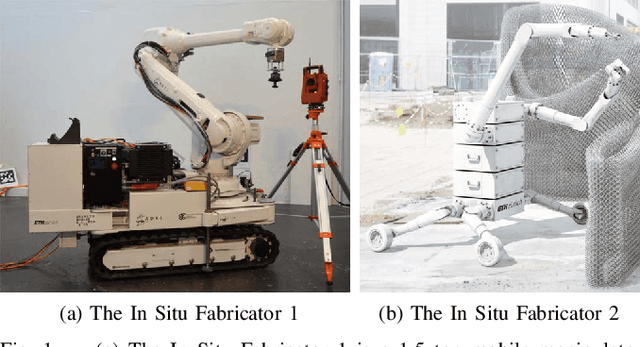

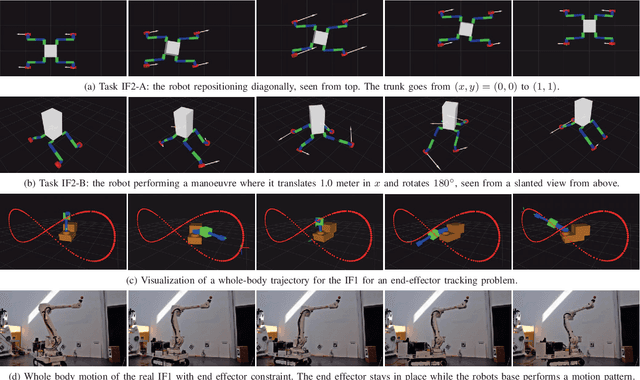
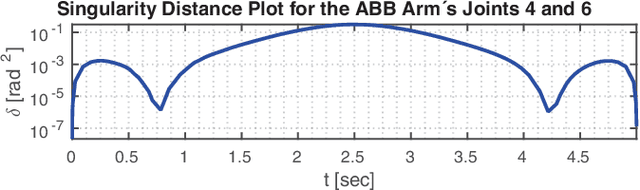
This work addresses the problem of kinematic trajectory planning for mobile manipulators with non-holonomic constraints, and holonomic operational-space tracking constraints. We obtain whole-body trajectories and time-varying kinematic feedback controllers by solving a Constrained Sequential Linear Quadratic Optimal Control problem. The employed algorithm features high efficiency through a continuous-time formulation that benefits from adaptive step-size integrators and through linear complexity in the number of integration steps. In a first application example, we solve kinematic trajectory planning problems for a 26 DoF wheeled robot. In a second example, we apply Constrained SLQ to a real-world mobile manipulator in a receding-horizon optimal control fashion, where we obtain optimal controllers and plans at rates up to 100 Hz.
Optimal and Learning Control for Autonomous Robots
Aug 30, 2017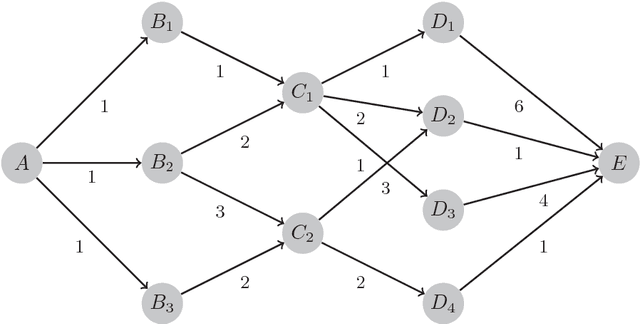
Optimal and Learning Control for Autonomous Robots has been taught in the Robotics, Systems and Controls Masters at ETH Zurich with the aim to teach optimal control and reinforcement learning for closed loop control problems from a unified point of view. The starting point is the formulation of of an optimal control problem and deriving the different types of solutions and algorithms from there. These lecture notes aim at supporting this unified view with a unified notation wherever possible, and a bit of a translation help to compare the terminology and notation in the different fields. The course assumes basic knowledge of Control Theory, Linear Algebra and Stochastic Calculus.
Mobile Robotic Fabrication at 1:1 scale: the In situ Fabricator
Jan 13, 2017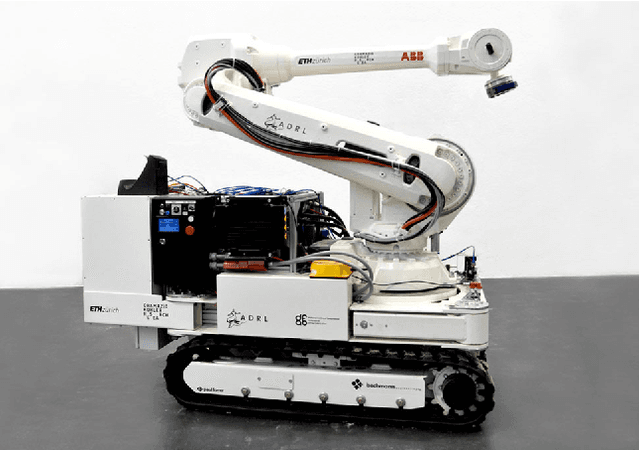
This paper presents the concept of an In situ Fabricator, a mobile robot intended for on-site manufacturing, assembly and digital fabrication. We present an overview of a prototype system, its capabilities, and highlight the importance of high-performance control, estimation and planning algorithms for achieving desired construction goals. Next, we detail on two architectural application scenarios: first, building a full-size undulating brick wall, which required a number of repositioning and autonomous localisation manoeuvres. Second, the Mesh Mould concrete process, which shows that an In situ Fabricator in combination with an innovative digital fabrication tool can be used to enable completely novel building technologies. Subsequently, important limitations and disadvantages of our approach are discussed. Based on that, we identify the need for a new type of robotic actuator, which facilitates the design of novel full-scale construction robots. We provide brief insight into the development of this actuator and conclude the paper with an outlook on the next-generation In situ Fabricator, which is currently under development.